

чужие файлы / Самуилов_Курсовая
.docxМИНИСТЕРСТВО ЦИФРОВОГО РАЗВИТИЯ, СВЯЗИ И МАССОВЫХ КОММУНИКАЦИЙ РОССИЙСКОЙ ФЕДЕРАЦИИ
ордена Трудового Красного Знамени
федеральное государственное бюджетное
образовательное учреждение высшего образования
«Московский Технический Университет Связи и Информатики»
(МТУСИ)
Кафедра РТС
Лабораторная работа
по дисциплине Радиоавтоматика
Выполнил:
студент группы БРА2101
Самуилов О.С.
Проверила:
ст. пр. Минаева О.Н.
Москва 2024
Цель работы
Целью цикла расчетно-экспериментальных работ по радиоавтоматике является формирование современного инженерного подхода к проектированию систем управления, при котором аналитические методы подкрепляются и дополняются экспериментальными исследованиями систем на вычислительных машинах.
Теоретические сведения
Положение движущихся объектов (ДО) в какой-либо системе координат определяется расстоянием Д от начала координат до этого объекта и направлением из начала координат на этот объект:

Рисунок 1 – Система АСН
Направление на объект определяется двумя угловыми координатами: азимутом и углом места.
Азимутом объекта называют угол в горизонтальной (азимутальной) плоскости между прямой, соединяющей начало координат с проекцией объекта на эту плоскость, и координатной осью.
Углом места объекта называют угол в вертикальной плоскости (угломерной) между прямой, соединяющей начало координат с проекцией объекта на плоскость, и прямой, проходящей через начало координат и объект.
Измерение угловых координат движущихся объектов осуществляется системой АСН. Система АСН (рис.1, Б) - это система радиоавтоматики, состоящая из приемопередающего устройства, антенны направленного действия А и двухканального следящего привода этой антенны, посредством которого осуществляется поворот антенны в двух плоскостях- азимутальной (горизонтальной) и угломестной (вертикальной).
Таким образом, система АСН состоит из двух следящих систем, в каждой из которых входной величиной является соответствующая угловая координата (азимут или угол места) движущегося объекта, а выходной величиной - угол, определяющий положение равносигнального направления (РСН) в азимутальной или угломестной плоскости. Обычно такие радиотехнические системы работают в импульсном режиме т. е. излучают в пространство короткие (τ~ 1мкс и менее) радиоимпульсы с частотой повторения 102 – 104 имп/с. При этом антенна работает на прием и на передачу: посредством антенного переключателя она подключается поочередно то к передатчику, то к приемнику.
Антенна системы АСН является антенной направленного действия. Из теории антенн известно, что если перед излучателем электромагнитных колебаний сверхвысокой частоты поместить параболический отражатель, размеры которого превышают длину волны этих колебаний, то излученная электромагнитная энергия будет распространятся лишь в узкой конусообразной области пространства, симметричной относительно электрической оси антенны. При этом интенсивность излучения внутри этой области зависит от направления излучения: по мере удаления от электрической оси антенны интенсивность излучения падает.
Зависимость относительной интенсивности излучения от направления характеризуется диаграммой направленности антенны. Плоская диаграмма направленности, показанная на рис. 2, характеризует распределение интенсивности излучения (Δθ) в плоскости, проходящей через электрическую ось антенны.
Максимум излучения соответствует направлению электрической оси антенны. Кроме того, диаграмма направленности антенны устанавливает зависимость коэффициента усиления антенны (при работе ее на приём) от направления прихода сигнала Δθ, отраженного от цели.
Антенна направленного действия совместно с приемопередатчиком образует угловой дискриминатор (УД) системы АСН. При этом внутри диаграммы направленности формируется равносигнальное направление, обладающее тем свойством, что при совпадении его с направлением на объект напряжение на выходе дискриминатора равно нулю. Если же равносигнальное направление не совпадает с направлением на объект, т.е. если возникает угловое рассогласование е(t), то на выходе дискриминатора появляется напряжение ошибки, пропорциональное рассогласованию Ug = Kgp * E, где Kgp - коэффициент передачи радиотехнического углового дискриминатора.

Рисунок 2 – Диаграмма направленности
На рис. 3 приведена функциональная схема одной из следящих систем, образующих систему АСН, состоящая из измерителя рассогласования или углового дискриминатора УД, усилительного устройства У и исполнительного двигателя ИД с редуктором Р. Объектом управления ОУ является следящая антенна А системы АСН. Кроме того, для получения требуемых динамических характеристик следящей системы в ее состав введено корректирующее устройство (звено) КУ. Оно состоит из тахометрического моста, вырабатывающего напряжение, пропорциональное скорости вращения ротора исполнительного двигателя и дифференцирующей цепи, и представляет собой цепь гибкой обратной связи - связи по ускорению, охватывающей усилитель и исполнительный двигатель следящей системы.

Рисунок 3 – Функциональная схема следящей системы в составе АСН
Возникающее в результате движения объекта рассогласование е(t) преобразуется угловым дискриминатором в напряжение ошибки Ug(t), которое поступает на вход усилителя следящей системы.
Выходное напряжение усилителями подводится к цепи управления исполнительного двигателя. Под действием этого напряжения ротор двигателя начинает вращаться с угловой скоростью Ωy(t) и через редуктор поворачивает антенну в соответствующей плоскости в сторону уменьшения рассогласования.
Для обеспечения поворота антенны в двух плоскостях выходные оси двигателей азимутальной и угломерной следящих систем соединены с антенной посредством карданного подвеса. Если с неподвижным основанием антенны совместить систему координат, то угловое положение антенны относительно этого основания определит азимут объекта в горизонтальной плоскости и угол места объекта и вертикальной плоскости.
Заметим, что исполнительный двигатель с редуктором совместно со следящей антенной представляет собой неизменяемую часть АСН с заданными динамическими характеристиками. Эти характеристики должны быть учтены при разработке управляющего устройства - усилителя с корректирующими цепями - для получения требуемых динамических характеристик всей системы. Поэтому в качестве объекта управления системы АСН целесообразно рассматривать не одну антенну, а антенну и исполнительный двигатель с редуктором, как единое целое (в динамическом отношении). При этом динамические свойства антенны, характеризуемые ее моментом инерции относительно выходной оси следящей системы, учитывают при расчете постоянной времени исполнительного двигателя.
 Если
упростить рисунок 3, можно представить
схему радиотехнического устройства в
общем виде следующим образом:
Если
упростить рисунок 3, можно представить
схему радиотехнического устройства в
общем виде следующим образом:
Рисунок 4 – Структурная схема РТС в общем случае
На
рисунке 5 представлена принципиальная
схема углового дискриминатора. В ней
выходные сигналы высокой частоты
суммарного и разностного каналов
моноимпульсной РЛС сравниваются таким
образом, что что один диод детектирует
сигнал
 ,
а другой – сигнал
,
а другой – сигнал
 .
На выходе диодов напряжения постоянного
тока, пропорциональные амплитудам
соответствующих сигналов, на сопротивлении
R
взаимно вычитаются, в результате чего
формируется напряжение сигнала ошибки
.
На выходе диодов напряжения постоянного
тока, пропорциональные амплитудам
соответствующих сигналов, на сопротивлении
R
взаимно вычитаются, в результате чего
формируется напряжение сигнала ошибки
 ,
определяемое формулой:
,
определяемое формулой:
 ,
где
,
где
 – коэффициент передачи (предполагается,
что оба диода линейные). Выходные
фильтрующие и усилительные цепи улучшают
характеристики сигнала ошибки.
– коэффициент передачи (предполагается,
что оба диода линейные). Выходные
фильтрующие и усилительные цепи улучшают
характеристики сигнала ошибки.

Рисунок 5 – Принципиальная схема углового дискриминатора
 Исполнительное
устройство фактически является прибором,
компенсирующим ошибку, вычисленную
дискриминатором. То есть, оно доворачивает
антенну так, чтобы её ось излучения
совпадала с направлением на цель.
Простейшем примером такого механизма
является двигатель с редуктором. Его
схема представлена на рисунке 6. В
качестве мотора могут использоваться
двигатели переменного и постоянного
тока. Для повышения срока службы мотора
путём снижения числа оборотов в систему
встраивается редуктор.
Исполнительное
устройство фактически является прибором,
компенсирующим ошибку, вычисленную
дискриминатором. То есть, оно доворачивает
антенну так, чтобы её ось излучения
совпадала с направлением на цель.
Простейшем примером такого механизма
является двигатель с редуктором. Его
схема представлена на рисунке 6. В
качестве мотора могут использоваться
двигатели переменного и постоянного
тока. Для повышения срока службы мотора
путём снижения числа оборотов в систему
встраивается редуктор.
Рисунок 6 – Исполнительное устройство
Расчет
Таблица 1 – Исходные данные
Вид САР |
W(S) неизменяемой части САР |
Kд |
Kн |
РТ-62 постоянные времени |
Xвх(t) |
|
В/град |
1/с |
Ty3 |
Tан |
Мкс/с2 |
||
АСН |
|
0.6 |
1.8 |
0.5 |
0.8 |
14 |

(Xош)уст от Xвх(t) |
Ty |
Xмв1 |
Xмв2 |
S()=S0 |
град |
с |
В |
град |
В2/Гц |
1.4 |
1.8 |
0.055 |
5 |
0.025 |
Расчет динамических звеньев первого порядка системы АСМ
Неизменяемая часть передаточной функции, согласно варианту, выглядит следующем образом:

Разбиваем передаточную функцию неизменяемой части системы на типовые динамические звенья первого порядка
 – первое,
интегрирующее звено
– первое,
интегрирующее звено
 – второе,
инерционное звено
– второе,
инерционное звено
 -
третье, инерционное звено
-
третье, инерционное звено
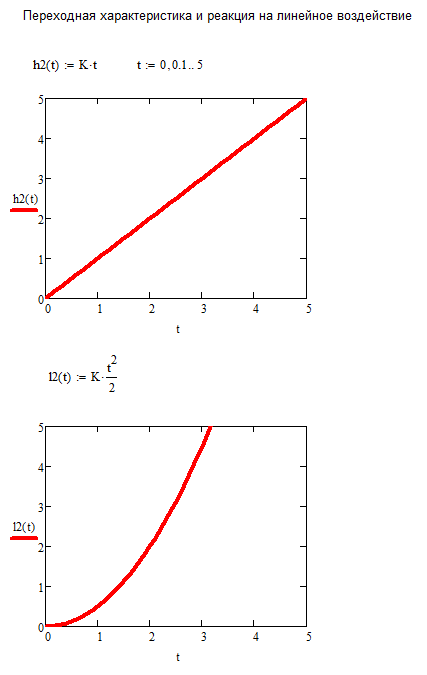
Рассчитываем и строим ЛАЧХ, ЛФЧХ, АФЧХ, переходную характеристику h(t) и реакцию l(t)на линейно меняющееся воздействие.
Расчет интегрирующего звена без ООС


Расчет первого инерционного звена без ООС




Расчет второго инерционного звена без ООС




Расчет интегрирующего звена c ООС




Расчет первого инерционного звена c ООС




Расчет второго инерционного звена c ООС


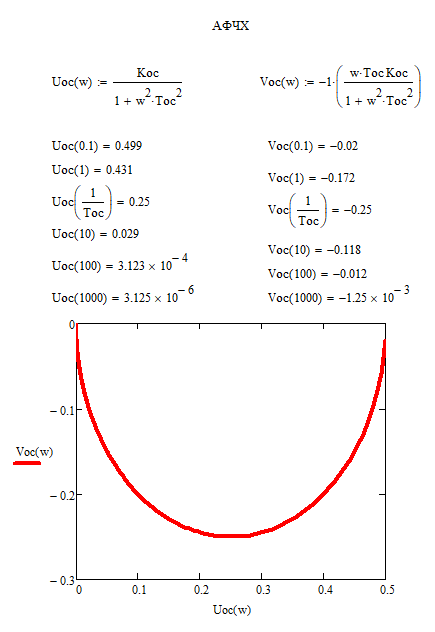

Исследование временных характеристик звеньев первого порядка
Интегрирующее звено без ООС

Рисунок 15 – Схема интегрирующего звена без ООС


Рисунок 16 – графики
Первое инерционное звено без ООС

Рисунок 17 – Схема инерционного звена без ООС


Рисунок 18 – графики
Второе инерционное звено без ООС

Рисунок 19 – Схема второго инерционного звена без ООС


Рисунок 20 – графики
Интегрирующее звено с ООС

Рисунок 21 – Схема интегрирующего звена с ООС


Рисунок 22 – графики
Первое инерционное звено с ООС

Рисунок 23 – Схема первого инерционного звена с ООС


Рисунок 24 – графики
Второе инерционное звено с ООС

Рисунок 25 – Схема второго инерционного звена с ООС


Рисунок 26 – графики
Исследование нескорректированной замкнутой системы
 Рисунок
27 –
Рисунок
27 –
 Рисунок
28 –
Рисунок
28 –
 Рисунок
29 –
Рисунок
29 –
 Рисунок
30 -
Рисунок
30 -
Определение допустимых величин для желаемой системы
Входной сигнал:
Xвх(t)=14 град/с=14*t
Порядок астигматизма v = 1
Минимальный коэффициент усиления:
Kmin= =
= =
=
Ty = 1.8 c





Параметры желаемой системы:
 =
10
=
10

v = 1






 Рисунок
31 – Блок-схема системы после коррекции
Рисунок
31 – Блок-схема системы после коррекции
 Рисунок
32 – ЛАЧХ Желаемой, Нашей и Корректирующей
систем
Рисунок
32 – ЛАЧХ Желаемой, Нашей и Корректирующей
систем
 Рисунок
33 – ЛФЧХ Желаемой, Нашей и Корректирующей
систем
Рисунок
33 – ЛФЧХ Желаемой, Нашей и Корректирующей
систем
 Рисунок
35 – АФЧХ скорректированной системы
Рисунок
35 – АФЧХ скорректированной системы
Вид САР |
W(S) неизменяемой части САР |
Kд |
Kн |
РТ-62 постоянные времени |
Xвх(t) |
|
В/град |
1/с |
Ty3 |
Tан |
Мкс/с2 |
||
АСН |
|
0.6 |
1.8 |
0.5 |
0.8 |
14 |
(Xош)уст от Xвх(t) |
Ty |
Xмв1 |
Xмв2 |
S()=S0 |
град |
с |
В |
град |
В2/Гц |
1.4 |
1.8 |
0.055 |
5 |
0.025 |



Так
как максимальная степень полинома
знаменателя
 , то для вычисления интеграла
, то для вычисления интеграла
 :
:
-
Коэффициенты знаменателя
Коэффициенты числителя
a0 =

b0 = 0
a1 =

b1 = 0
a2 =

b2 =

a3 = 1

b3 = 1
a4 =








Рассмотрим скорректированную систему по варианту после включения в нее нелинейного звена как непрерывную и нелинейную.




Согласно методу гармонического баланса, автоколебания в замкнутой системе возможны в том случае, если выполняются условия баланса фаз и баланса амплитуд (усиления):

Передаточная функция желаемой характеристики имеет вид:


В
этой точке на графике ЛАЧХ строится
нормированный вектор 20lg(| |),
начало которого смещено на -20lg(
|),
начало которого смещено на -20lg( )
)
Запасы по амплитуде
 =-26.239
дБ
=-26.239
дБ
= =0,6
=0,6
Если
 ,
то будет выполняться условие возникновения
автоколебаний.
,
то будет выполняться условие возникновения
автоколебаний.


Условие баланса фаз выполняется, а условие баланса амплитуд — нет. Поэтому в системе автоколебаний не будет. Тогда найдем такое значение , чтобы выполнялись два условия
=-26.239 дБ
= =0.079
