

Графическая часть: Частотные характеристики

Рисунок 85 – ЛАЧХ для Тд = 0.092
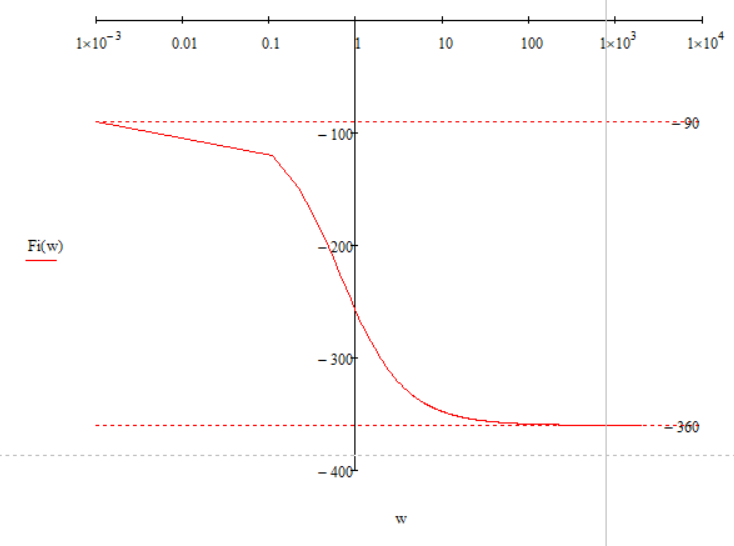
Рисунок 86 – ЛФЧХ для Тд = 0.092

Рисунок 87 – ЛАЧХ при Тд = 0.093
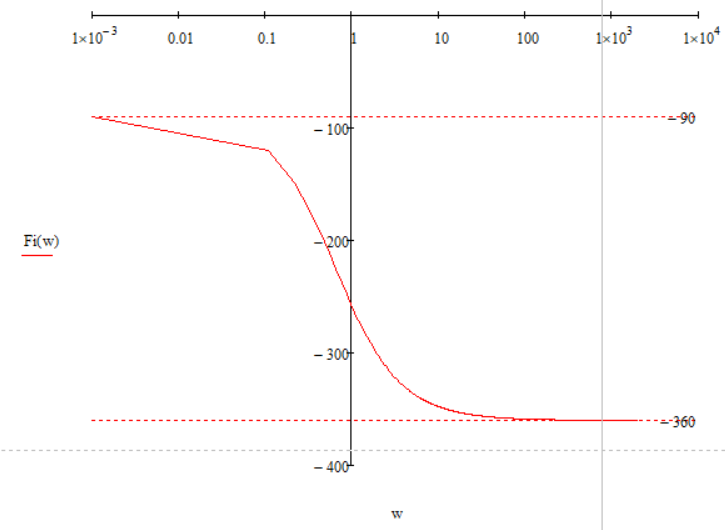
Рисунок 88 – ЛФЧХ для Тд = 0.093
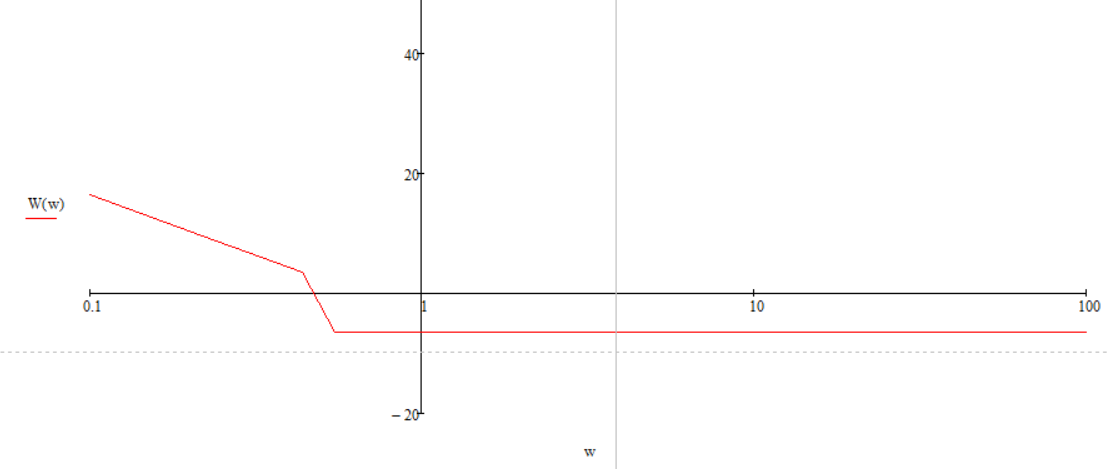
Рисунок 89 – ЛАЧХ для Тд = 0.094
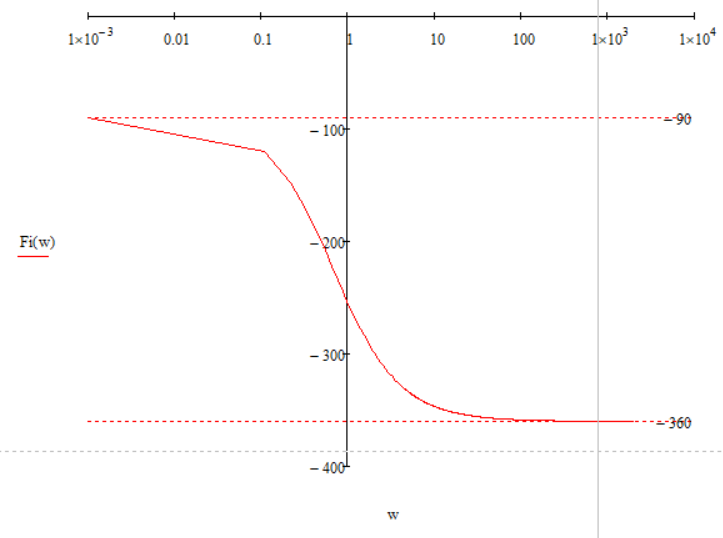
Рисунок 90 – ЛФЧХ для Тд = 0.094
Произведём Z-преобразование системы.
Преобразуем при Tд = 0.92:
Приведем к общему знаменателю:

Коэффициенты ИХ:






Преобразуем при Tд = 0.093:


Коэффициенты ИХ:





Преобразуем при Tд = 0.094:
Коэффициенты ИХ:





Графическая часть: Импульсные характеристики

Рисунок 91 – Импульсная характеристика для Tд = 0.092
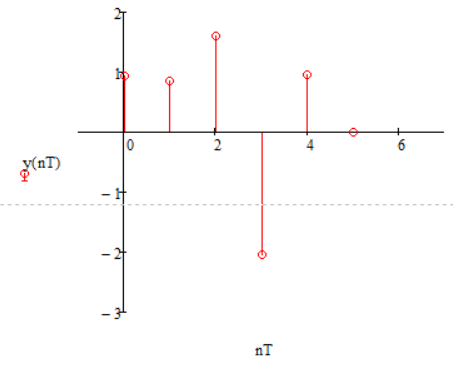
Рисунок 92 – Импульсная характеристика для Tд = 0.093
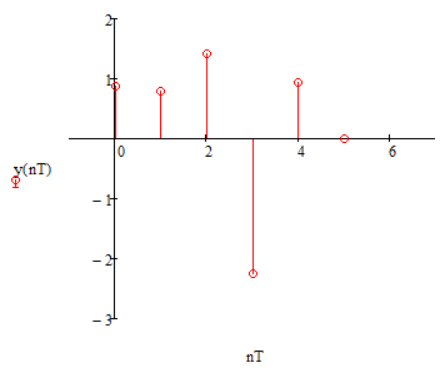
Рисунок 93 – Импульсная характеристика для Tд = 0.094
Вычислим ошибки при различных Tд:
Для Tд = 0.092:

Для Tд = 0.093:
Для Tд = 0.094:
Вывод:
В данной курсовой работе было произведено ознакомление с основами проектироавния систем автоматического управления как с использованием расчетных и графоаналитических методов, так и с помощью систем автоматизированного проектирования для ЭВМ.
Было проведено ознакомление с назначением и особенностями проектируемой радиоавтоматической системы, были исследованы ее динамические свойства при заданных исходных параметрах элементов. Был произведен поиск подходящих значений параметров системы, при которых показатели качества работы системы, определяющие степень колебательности переходных процессов, точность и быстродействие, имеют требуемые значения при заданных уровнях и типах полезного воздействия Xвх в (t) и мешающих воздействиях Xм в(t). Также была осуществлена коррекция исходной системы с передаточной функцией Wн(S) путем включения в систему динамических звеньев коррекции с передаточной функцией Wкорр(S). Было исследовано влияние на работоспособность и динамические свойства скорректированной системы имеющихся в ее составе нелинейных звеньев. Было проведено исследование влияния дискретизации входного сигнала по времени, имеющего место в импульсных радиотехнических устройствах, на динамические свойства радиоавтоматических систем. Для большей конкретности и физической наглядности расчетов и экспериментального исследования проводились для радиоавтоматическая система (ЧАП), входящей в контур управления импульсной радиолокационной станции (РЛС).
Список литературы
1) "Кафедра Радиотехнических Систем". (1981). Методическое руководство к выполнению лабораторных работ по курсу "Радиоавтоматика", Часть 2. Москва: "Кафедра Радиотехнических Систем".
2) А. М. Бонч-Бруевич, Л. Я. (2006). Методические указания по выполнению лабораторного практикума по дисциплине "Радиоавтоматика", Часть 2. Москва: "Кафедра Радиотехнических систем".
3) Иодко, Е. К. (1968). Основы Автоматики и Телемеханики. Москва: "Связь".
4) О. Н. Минаева, Л. Я. (2012). Методические указания по дисциплине Радиоавтоматика с использованием программного обеспечения Matlab с расширением Simulink. Москва: Кафедра "РТС".
Москва 2024