

Нахождение зависимости времени установления переходного процесса от коэффициента усиления цепи Исходные данные
Передаточная функция нескорректированной цепи:
При усилении
 ,
получим:
,
получим:
Частота
среза

Запас
по фазе

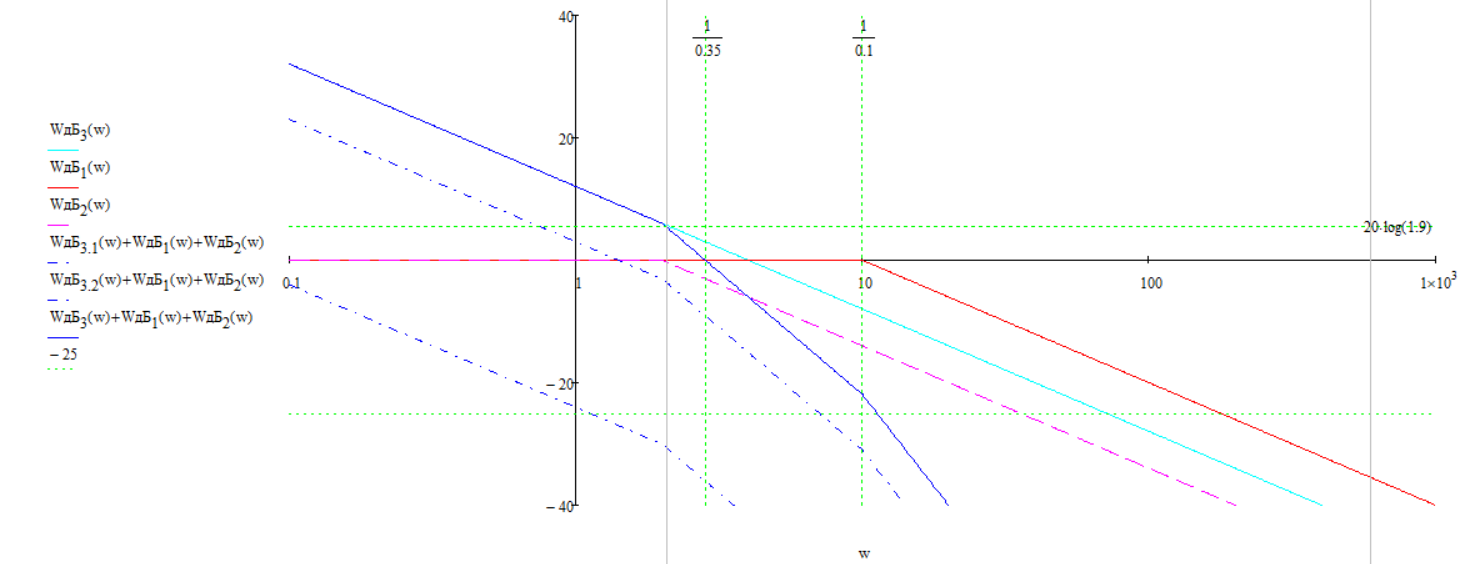
Рисунок 46 – ЛАЧХ
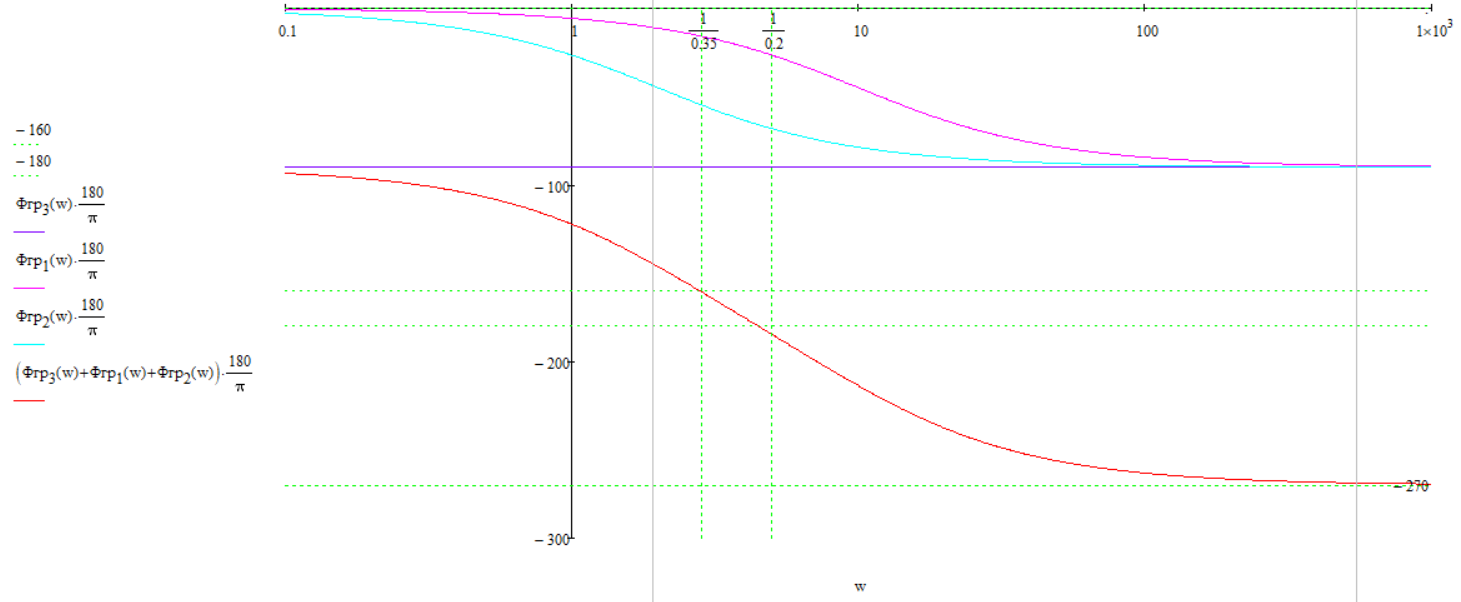
Рисунок 47 – ЛФЧХ
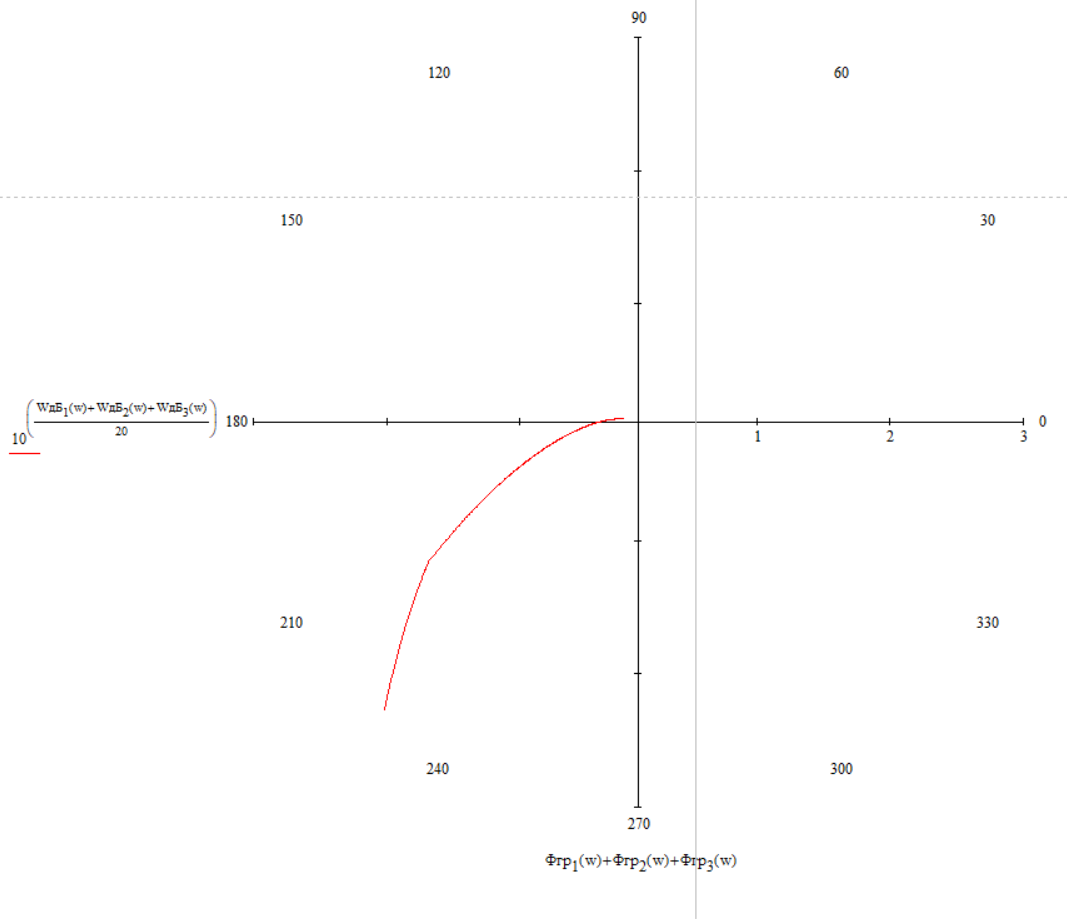
Рисунок 48 – АФЧХ
2)
Сделаем запас по фазе
 ,
тогда получим:
,
тогда получим:
Усиление

Частота
среза

Рисунок 49 – ЛАЧХ

Рисунок 50 – ЛФЧХ
Рисунок 51 – АФЧХ
3)
Сделаем запас по фазе
 ,
тогда получим:
,
тогда получим:
Усиление

Частота
среза

Рисунок 52 – ЛАЧХ
Рисунок 53 – ЛФЧХ
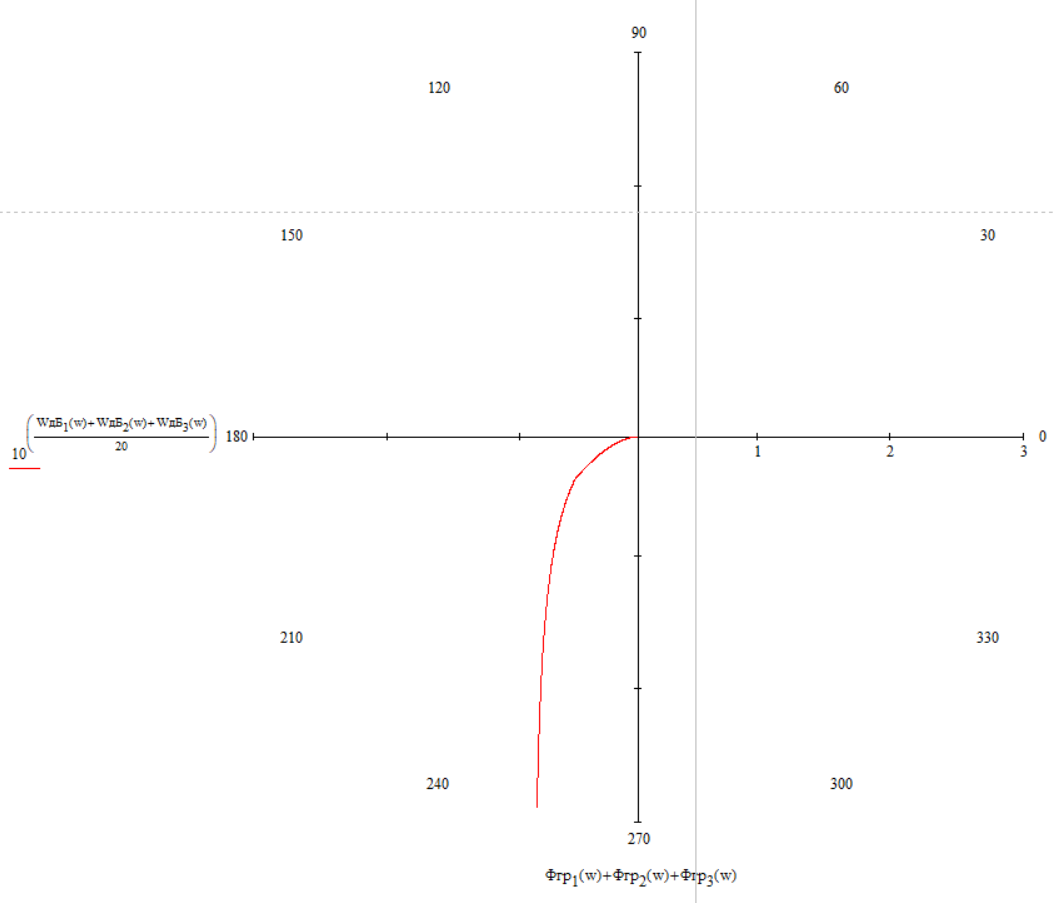
Рисунок 54 – АФЧХ

Рисунок 55 – Схема
Построим ЛАЧХ, ЛФЧХ, АФЧХ для замкнутой системы в программе Matlab Simulink.
Построим переходные характеристики h(t) для разных коэффициентов усиления.
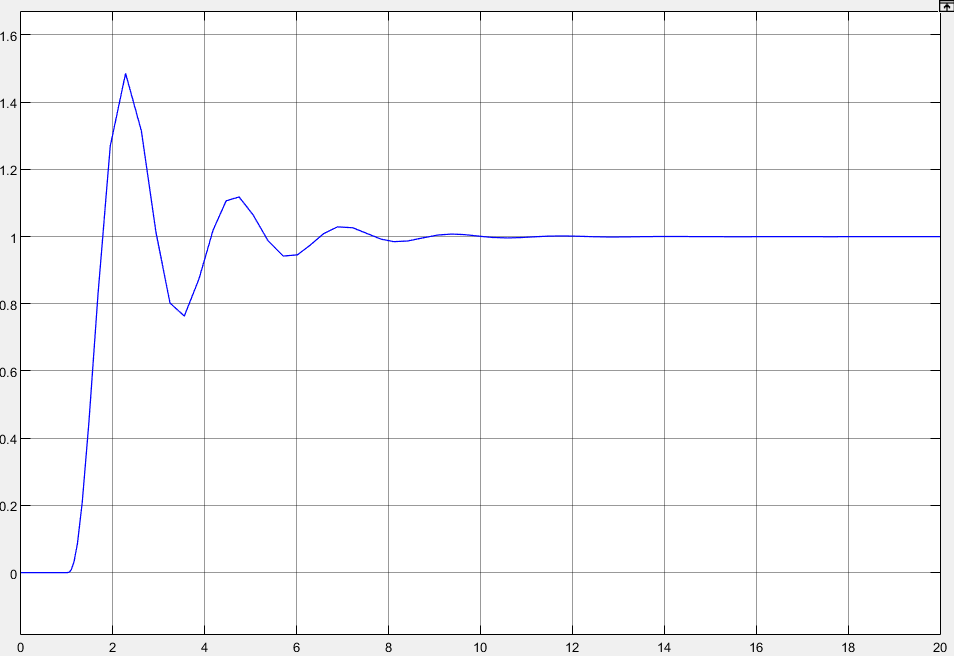
Рисунок
56 – Переходная характеристика h(t) для
и

Время
установления
 ;
;
Для
того чтобы определить величину
перерегулирования
 определим максимальную амплитуду
определим максимальную амплитуду
 и амплитуду установления
и амплитуду установления

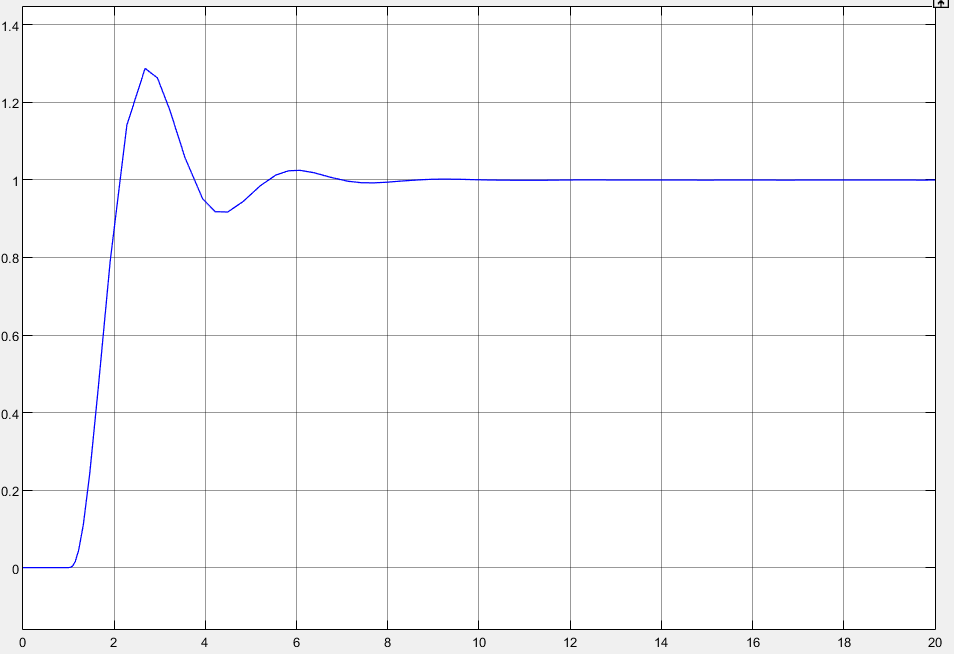
Рисунок
57 – Переходная характеристика h(t) для
 и
и
Время
установления
 ;
;
Перерегулирование
 ;
;
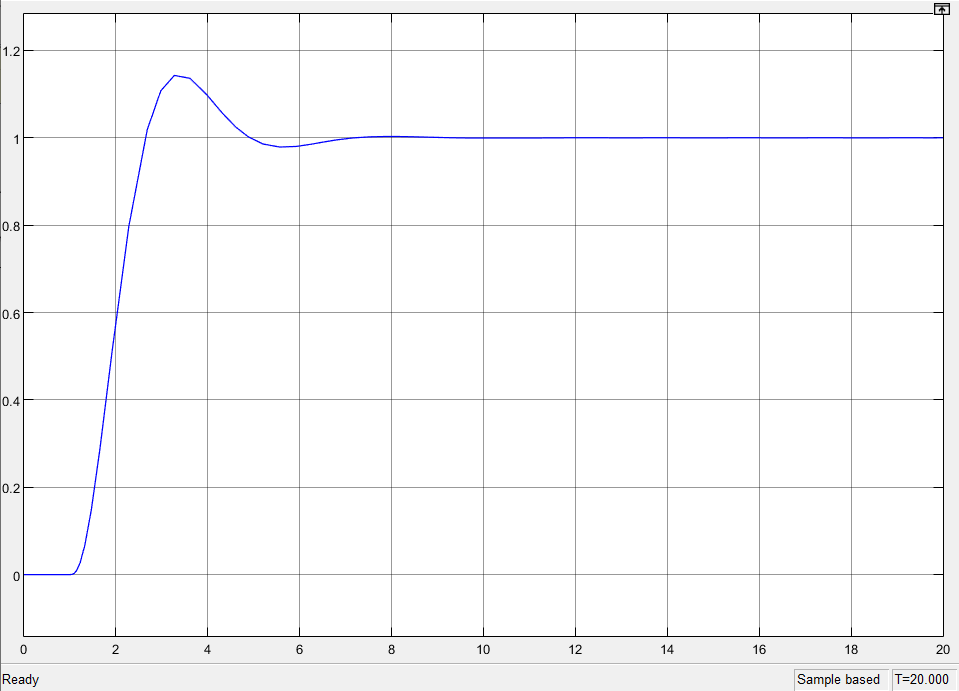
Рисунок 58 – Переходная характеристика h(t) для и
Время
установления
 ;
;
Перерегулирование
 ;
;
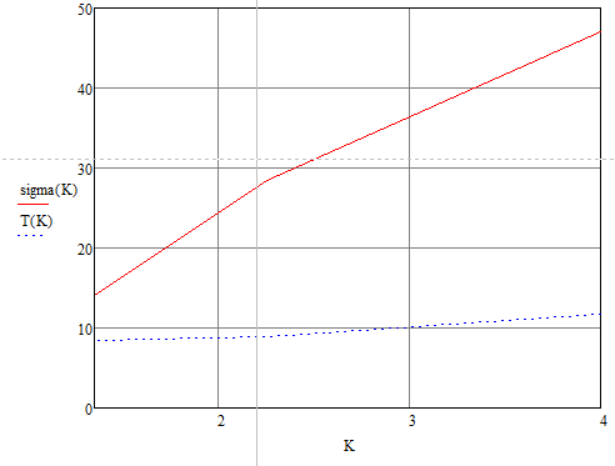
Рисунок 59 – Зависимость время установления и перерегулирования от коэффициента усиления.
Вывод:
В ходе выполнения лабораторного практикума были получены графики ЛАЧХ, ЛФЧХ и годограф нескорректированной цепи динамических звеньев, так же была получена зависимость времени установления импульса и перерегулирования в системе от коэффициента усиления интегрирующего звена. По полученным графикам можно сделать вывод, что при увеличении коэффициента усиления К увеличивается перерегулирование и время установления импульса в системе.
Расчёт и построение желаемого звена и звена коррекции; их характеристик Предварительный расчёт
Исходные данные:
 мкс/с
мкс/с


Передаточная функция нескорректированной цепи:
Для достижения лучших параметров цепи её необходимо скорректировать. С целью "попадания" в данные параметры системы и будет производиться дальнейший расчёт.
Так как старшая производная входного воздействия равна 1, то желаемая система должна содержать 1 интегрирующее звено, чтобы она отслеживала заданное входное воздействие с конечной ошибкой.
По функции нескорректированной цепи построим график (красный цвет).
По исходным данным вычислим "ворота" требуемой частоты и минимальный коэффициент усиления системы.


Для обеспечения требуемой точности:

Построим передаточную характеристику желаемой системы.

Имея данное выражение, получим звено коррекции.
Построим ЛАЧХ звена коррекции.
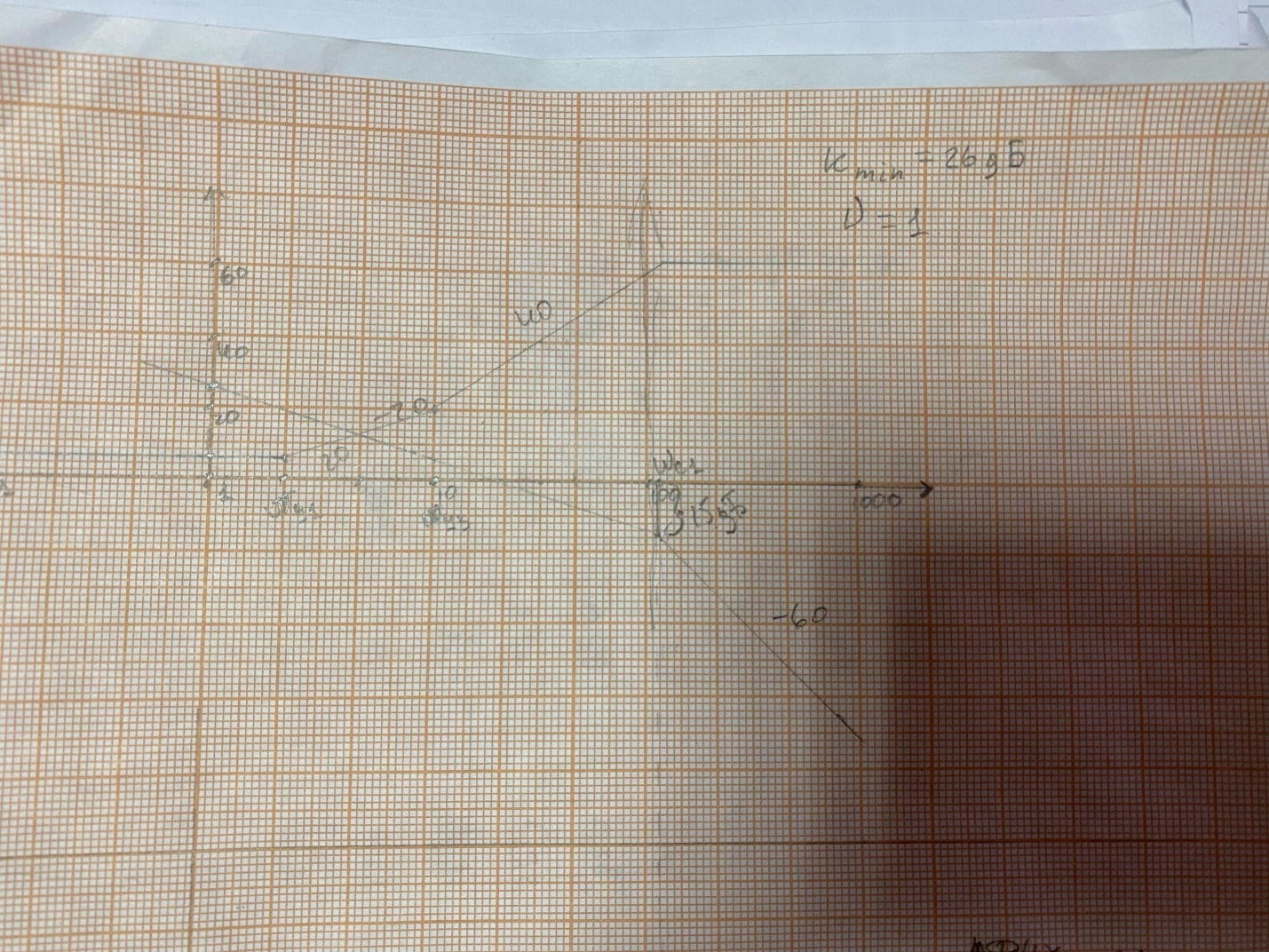
Рисунок 60 – Передаточные характеристики полученных звеньев
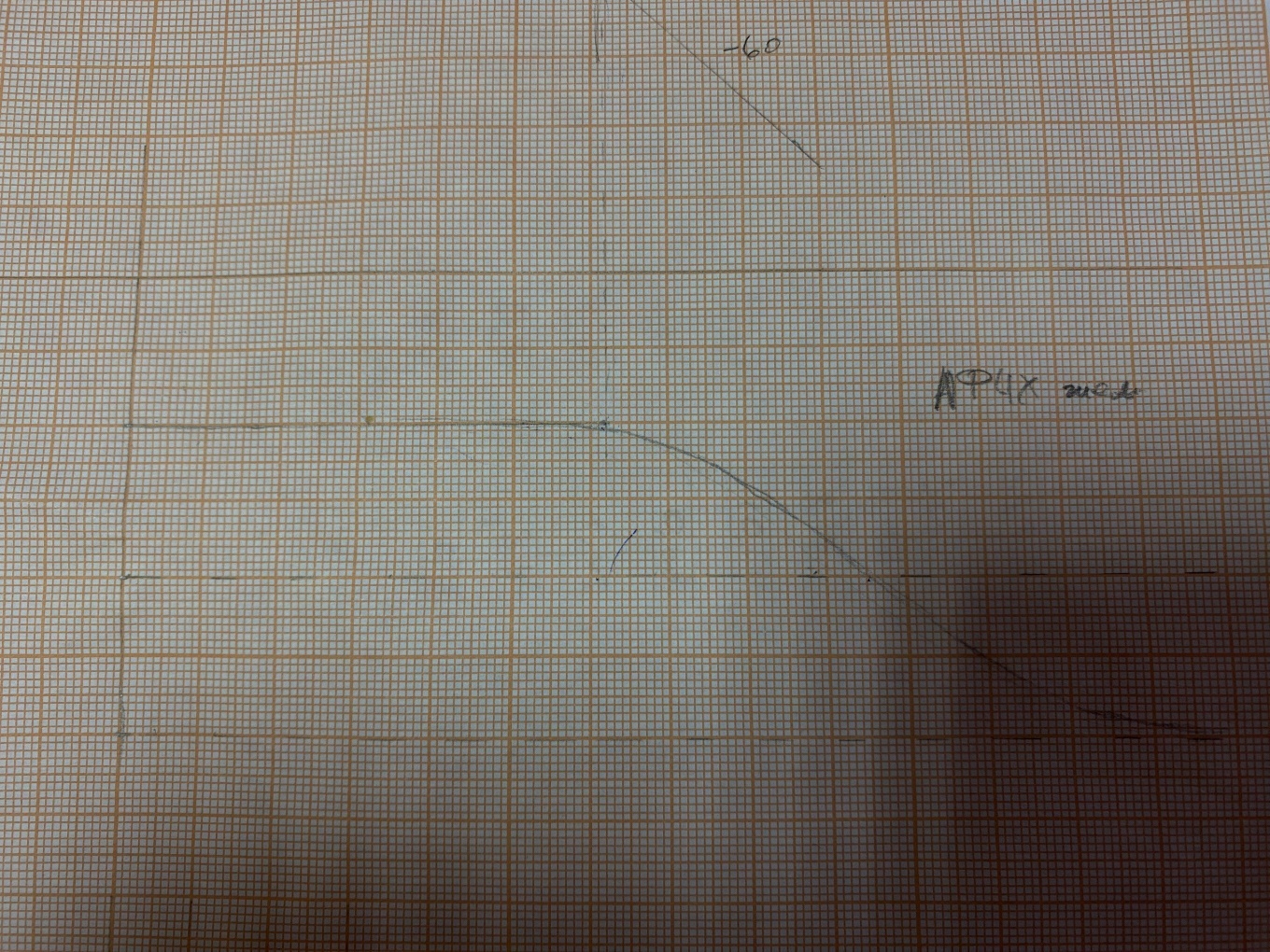
Рисунок 61 – Фазочастотная характеристика желаемого звена
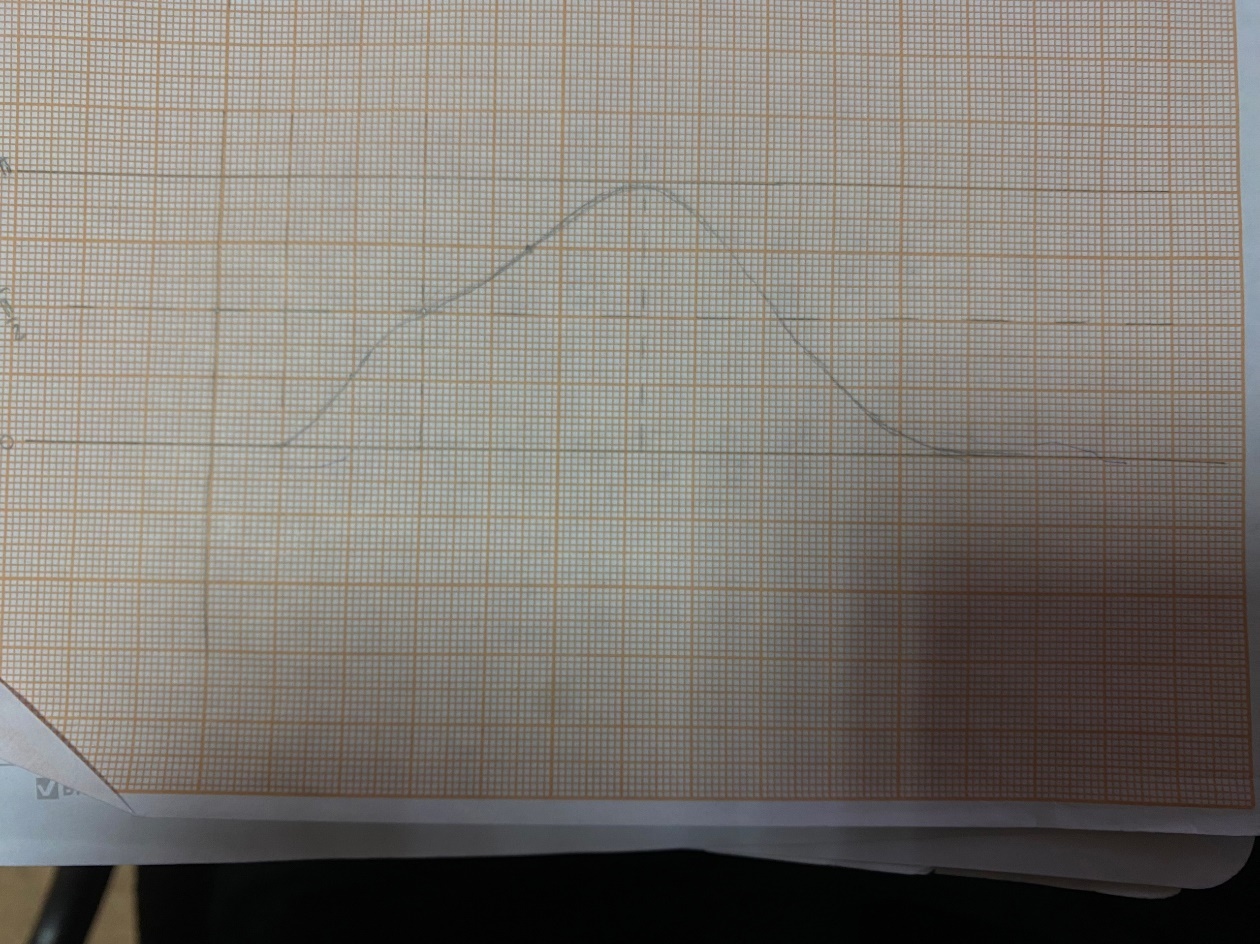
Рисунок 62 – Фазочастотная характеристика звена коррекции
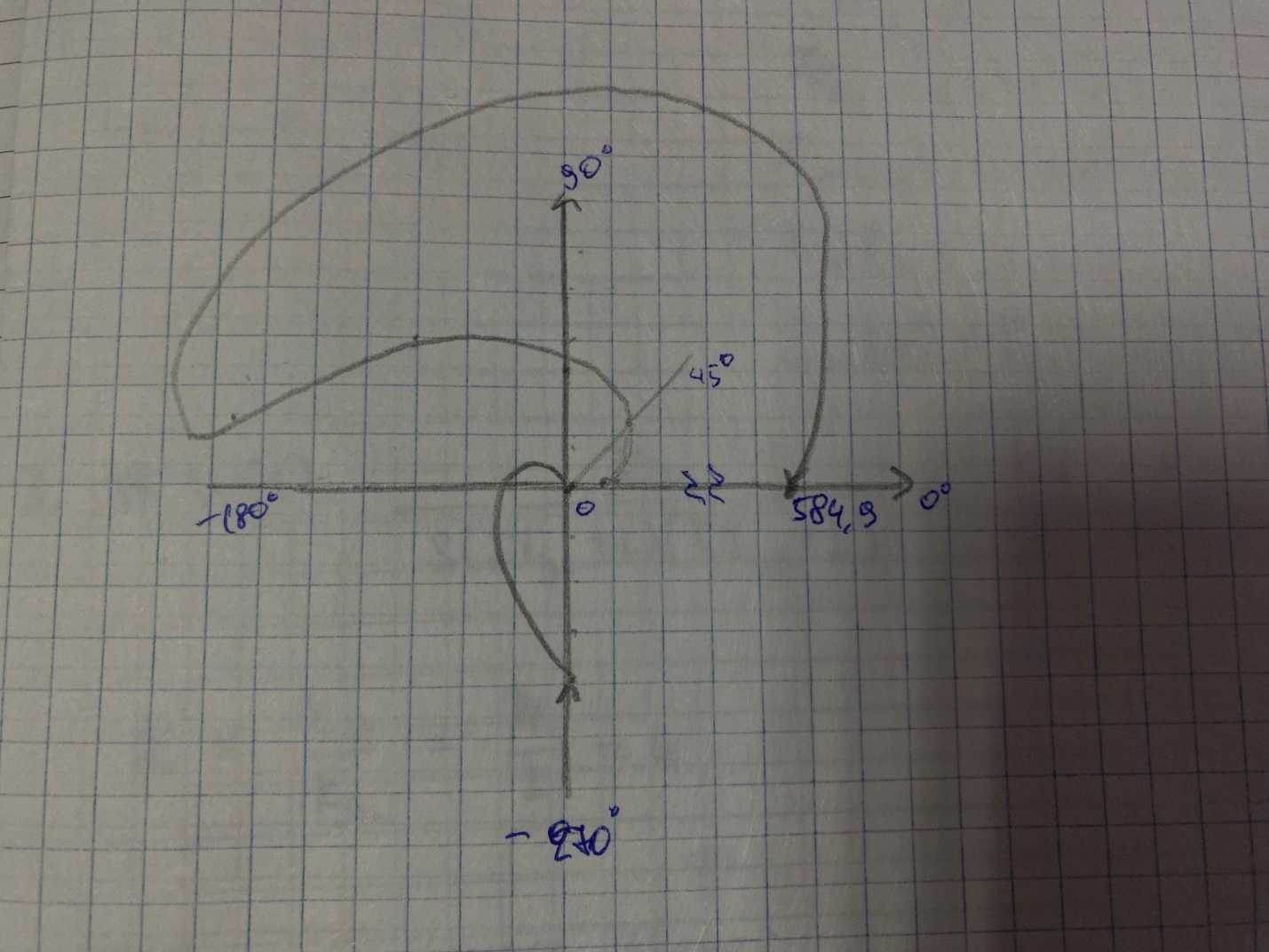
Рисунок 63 – Амплитудно-фазо-частотные характеристики полученных звеньев