

МИНОБРНАУКИ РОССИИ
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ
ЭЛЕКТРОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
«ЛЭТИ» ИМ.В.И.УЛЬЯНОВА (ЛЕНИНА)
КАФЕДРА ЛИНС
ОТЧЕТ
ЛАБОРАТОРНАЯ РАБОТА №3
По дисциплине «Исследование стабилизированных платформ»
Тема: Исследование двухосной четырехгироскопной платформы
Студенты гр. 0584 |
|
Чащин Д. |
|
|
Иванова А.А. |
Преподаватель |
|
Гупалов В.И. |
Санкт-Петербург
2024
ЦЕЛИ РАБОТЫ:
Изучение конструктивных особенностей реальных гироприборов данного класса; определение некоторых статистических и динамических характеристик прибора; привитие элементарных навыков в обращении с гироприборами.
Теоретические сведения:
В
том случае, когда двухосная четырехгироскопная
платформа находится на неподвижном
основании, а ее центр инерции совпадает
с точкой пересечения осей подвеса,
каналы стабилизации относительно осей
подвеса можно считать независимыми
друг от друга. Линейная математическая
модель сепаратного канала стабилизации
относительно оси
 платформы
имеет вид:
платформы
имеет вид:
 (1.1)
(1.1)
где
 – момент инерции подвижных частей
платформы, приведенный к оси стабилизации
;
– момент инерции подвижных частей
платформы, приведенный к оси стабилизации
;
 – момент инерции гироскопа относительно
оси вращения кожуха
– момент инерции гироскопа относительно
оси вращения кожуха
 ;
;
 – коэффициенты приведенных моментов
сил вязкого трения; Н
– кинетический момент одного гироскопа;
– коэффициенты приведенных моментов
сил вязкого трения; Н
– кинетический момент одного гироскопа;
 – крутизна характеристики по напряжению
стабилизирующего двигателя и датчика
моментов;
– крутизна характеристики по напряжению
стабилизирующего двигателя и датчика
моментов;
 – постоянные коэффициенты времени и
коэффициенты усиления усилителей;
– постоянные коэффициенты времени и
коэффициенты усиления усилителей;
 – напряжения, приложенные к обмоткам
управления двигателя и датчика моментов;
α – малый угол поворота платформы вокруг
неподвижной оси стабилизации
– напряжения, приложенные к обмоткам
управления двигателя и датчика моментов;
α – малый угол поворота платформы вокруг
неподвижной оси стабилизации
 ;
– малый угол поворота кожуха гироскопа
вокруг его оси;
;
– малый угол поворота кожуха гироскопа
вокруг его оси;
 – крутизна линейных участков характеристик
датчиков углов α и .
– крутизна линейных участков характеристик
датчиков углов α и .
После
перехода к операторной форме записи
уравнения (1.1), полагая
 ,
получим следующую зависимость угла
поворота кожуха гироскопа от момента:
,
получим следующую зависимость угла
поворота кожуха гироскопа от момента:
 (1.2)
(1.2)
где




После окончания переходного процесса угол имеет установившееся значение
 (1.3)
(1.3)
Форма
переходного процесса и его длительность
зависят от числовых значений параметров
 .
.
Если
 ,
то после окончания переходного процесса
,
то после окончания переходного процесса
 .
Движение платформы в этом случае
описывается уравнением:
.
Движение платформы в этом случае
описывается уравнением:
Если
характеристика датчика угла
 при
при
 имеет область насыщения, то постоянная
скорость приведения платформы в
горизонтальное положение при
имеет область насыщения, то постоянная
скорость приведения платформы в
горизонтальное положение при
 имеет значение
имеет значение
 (1.4)
(1.4)
Движение
платформы относительно другой оси
стабилизации описывается аналогичными
соотношениями. Но вместо углов α и
 надо будет иметь ввиду углы
надо будет иметь ввиду углы
 и
и
 моменты инерции
моменты инерции

Если один из гироскопов в каждой паре не вращается, в (1.1)(1.4) надо вводить кинетический момент одного гироскопа.
Описание лабораторной установки:
Лабораторная
установка представляет собой промышленный
образец платформы, стабилизированной
в плоскости горизонта. Платформа состоит
из гироблока, блока усилителей и пульта
управления. Все перечисленные блоки
объединены в одном корпусе. Кинематическая
схема гироблока изображена на рис. 1.
В гироблоке использован обращенный
карданов подвес. Наружное кольцо подвеса
представляет собой крестовину 3, ось
вращения которой
 должна быть направлена вдоль продольной
оси корабля. Поэтому угол поворота
крестовины вокруг ее оси является углом
бортовой качки корабля. Внутреннее
кольцо подвеса одновременно является
стабилизированной платформой 17. Осью
вращения платформы является ось
крестовины
должна быть направлена вдоль продольной
оси корабля. Поэтому угол поворота
крестовины вокруг ее оси является углом
бортовой качки корабля. Внутреннее
кольцо подвеса одновременно является
стабилизированной платформой 17. Осью
вращения платформы является ось
крестовины
 .
Угол поворота платформы вокруг оси
представляет собой угол килевой качки,
отсчитываемый в вертикальной плоскости.
С крестовиной 3 жестко скреплены зубчатые
секторы 8 и 19, которые соединены через
соответствующие координаты со
стабилизирующими двигателями 4 и 1,
соответственно, и со шкалами грубого и
точного отсчетов. Шкалы на схеме не
показаны. Двигатель 4 находится на
стабилизированной платформе. Передаточное
число редуктора двигателя
.
Угол поворота платформы вокруг оси
представляет собой угол килевой качки,
отсчитываемый в вертикальной плоскости.
С крестовиной 3 жестко скреплены зубчатые
секторы 8 и 19, которые соединены через
соответствующие координаты со
стабилизирующими двигателями 4 и 1,
соответственно, и со шкалами грубого и
точного отсчетов. Шкалы на схеме не
показаны. Двигатель 4 находится на
стабилизированной платформе. Передаточное
число редуктора двигателя Двигатель 1 находится на основании
прибора. Передаточное число редуктора
двигателя
Двигатель 1 находится на основании
прибора. Передаточное число редуктора
двигателя
 .
В качестве стабилизирующих двигателей
используются двухфазные асинхронные
двигатели с полым ротором АДП-363. На
стабилизированной площадке установлены
два гироузла со спаренными гироскопами
5 и 18. Гироскопы ГА-10/15 представляют собой
трехфазные асинхронные двигатели с
короткозамкнутым ротором.
.
В качестве стабилизирующих двигателей
используются двухфазные асинхронные
двигатели с полым ротором АДП-363. На
стабилизированной площадке установлены
два гироузла со спаренными гироскопами
5 и 18. Гироскопы ГА-10/15 представляют собой
трехфазные асинхронные двигатели с
короткозамкнутым ротором.
В гироузлах гироскопы соединены друг с другом зубчатыми секторами 16. Каждая пара гироскопов имеет электромагнитный арретир, не показанный на рисунке. На оси вращения кожуха одного из гироскопов каждой пары установлены индукционные датчики угла 6, 14. Над индукционными датчиками располагаются потенциометрические датчики, предназначенные для регистрации движений гироскопов. На оси вращения другого гироскопа той же пары установлены датчики момента 7, 15. Датчик момента представляет собой двухфазный асинхронный двигатель с разомкнутым магнитопроводом и плоским ротором. Датчики моментов получают сигналы от двух маятников с вертикальной осью чувствительности. Маятники находятся на стабилизированной площадке. На рис. 1 они не показаны. Обесточенная платформа удерживается в исходном положении стопорным стержнем 13 с пружиной. Этот стержень входит в отверстие на корпусе прибора, соединяя таким образом платформу с корпусом.
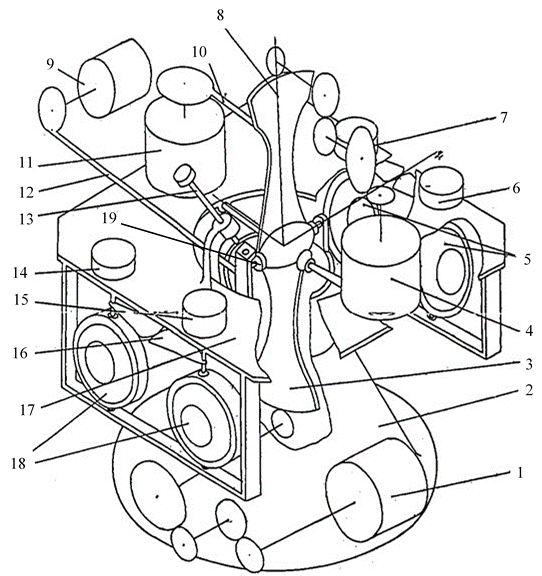



Рисунок 1. – Кинематическая схема гироблока
Для дистанционного измерения углов поворота крестовины и платформы используются датчики угла 9, 11, представляющие собой синусно-косинусные вращающиеся трансформаторы (СКВТ). Роторы СКВТ соединены с зубчатыми секторами 8 и 19 кривошипно-шатунными механизмами 10 и 12 соответственно.
Принципиальная электрическая схема лабораторной установки изображена на рис. 2.
Кабель соединяет установку с источниками питания трехфазным переменным током и стабилизированным постоянным током. Замыканием ключа 10 («гироскопы») подается питание на гироскопы 8, датчики момента 1 и 6, горизонтальные маятники 2 и 5 и индукционные датчики угла 3 и 4.
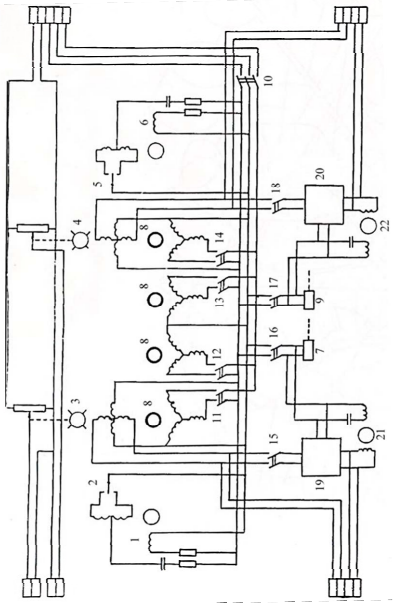
Рисунок 2. – Принципиальная электрическая схема лабораторной установки
Ключом источника стабилизированного тока подается питание на потенциометрические датчики 3 и 4. Ключи 1114 позволяют выключить требуемый гироскоп, оставив под напряжением остальные элементы схемы. Статоры индукционных датчиков 3 и 4. Ключами 15 (усилитель бортовой качки) и 16 (усилитель килевой качки) подается питание на соответствующие усилители, обмотки электромагнитов арретиров 7, 9 и обмотки возбуждения стабилизирующих двигателей.
Напряжение сигнальных обмоток статоров индукционных датчиков угла 3 и 4 подается на входы усилителей 19 и 20 соответственно. Напряжение, снятое с сигнальной обмотки датчиков угла 3 и 4, после усиления в усилителях подается на обмотки управления стабилизирующих двигателей 21 и 22 соответственно.