

LR2
.docxМИНОБРНАУКИ РОССИИ
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ ЭЛЕКТРОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
«ЛЭТИ» ИМ. В.И.УЛЬЯНОВА(ЛЕНИНА)
Кафедра ИИСТ
ОТЧЕТ
по лабораторной работе № 2
по дисциплине «Информационные технологии
в приборостроении»
Студенты гр. 0584 |
|
Чащин Д. |
|
|
Иванова А.А. |
Преподаватель |
|
Гупалов В.И |
Санкт-Петербург
2024
Цель работы:
Углубить и закрепить знания, полученные при изучении теоретического курса; получить элементарные навыки экспериментальных исследований свойств одноосных стабилизированных платформ.
Описание лабораторной установки
В состав лабораторной установки входят:
одноосная двухгироскопная стабилизированная платформа;
одноосный стенд качки;
пульт управления платформой.
Технические характеристики платформы:
гироскоп ЛАС 3,5/30 (кинетический момент – 0,4 Н·м·с, момент инерции ротора – 0,13·10-3 Н·м·с2, скорость вращения ротора – 30000 об/мин);
напряжение источника питания – 40 В;
частота тока источника питания – 500 Гц.
Програма работы
1. Изучение конструктивных особенностей платформы.
2. Определение уходов двухгироскопной платформы на неподвиж-ном основании.
3. Определение уходов двухгироскопной платформы на качающемся основании.
4. Снятие АЧХ ДУ() и ДУ() двухгироскопной платформы при ка-чании основания вокруг оси стабилизации платформы.
5. Определение угловой скорости приведения платформы в плос-кость горизонта.
Основные теоретические положения
Кинематическая схема одноосной стабилизирующей платформы приведена на рис. 2.1. Гироскопы Г1 и Г2 установлены на платформе П и соединены между собой зубчатыми секторами. На оси вращения Г1 установлен ротор магнитоэлектрического датчика момента ДМ, представляющий собой постоянный магнит. Статор датчика момента установлен на основании платформы и представляет собой катушки с обмотками управления. На обмотки управления катушек подается напряжение постоянного тока до 27 В.
На оси вращения Г2 установлен датчик угла (ДУ). На основании установлен стабилизирующий двигатель СД постоянного тока, соединенный с платформой при помощи редуктора.
На платформе укреплен маятник М, предназначенный для управления направлением тока, протекающего через катушки ДМ, и приведения платформы в горизонтальное положение. Отклонение платформы фиксируется потенциометрическим датчиком угла поворота ДУα. Питание на элементы гироблока подается через торсионные токоподводы, обладающие малым моментом сопротивления.
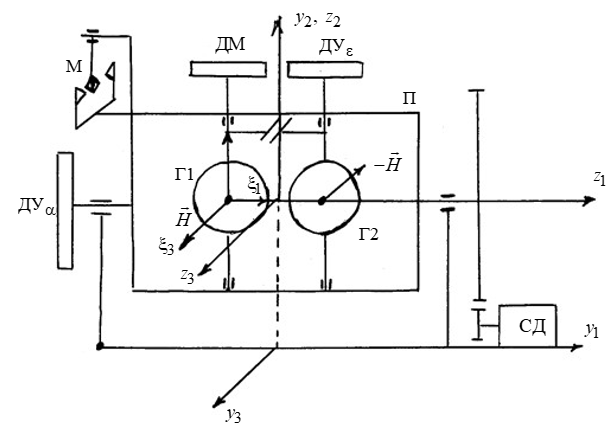
Рис. 2.1. – Кинематическая схема двухгироскопной платформы
Электрическая схема лабораторной установки приведена на рис. 2.2. Напряжение питания подается на элементы платформы через токоподводы, обмотки статоров гироскопов включены так, чтобы гироскопы вращались в разные стороны. Питание на обмотку управления стабилизирующего двигателя подается через контакты реле Р1.
Управление ДМ осуществляется с помощью маятника. При наклоне платформы на угол, превышающий зону застоя маятника, контакты замыкаются и на обмотки датчика момента подается напряжение 27 В, создающее вращающий момент, который возвращает платформу в исходное положение. Напряжение на выходах датчиков угла ДУ() и ДУ() измеряется миллиамперметром.
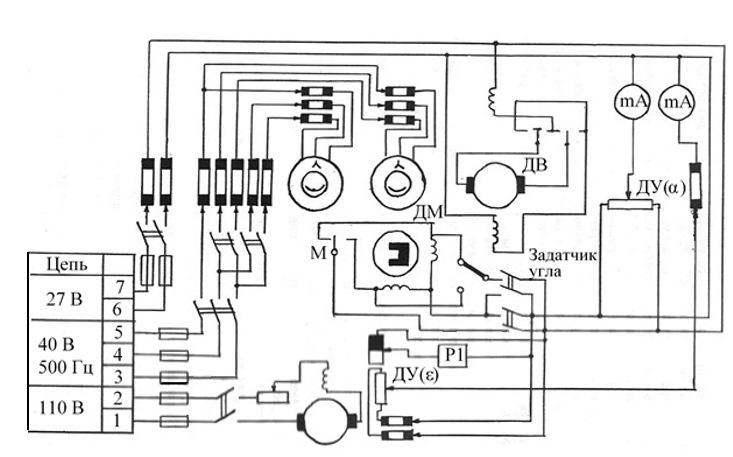
Рис. 2.2. – Электрическая схема лабораторной установки
Подача питания на двигатель качающегося стола осуществляет тумблером «110 В», скорость качки регулируется потенциометром. Тумблер «Задатчик угла» позволяет отклонять платформу на заданный угол. Тумблер «Коррекция» предназначен для подключения системы коррекции стабилизированной платформы.
Ход работы
Таблица 2.1 – значения при уходе платформы на качающемся основании с выключенной коррекции
№ |
1 |
2 |
3 |
4 |
5 |
Гироскопы, I,мА |
40 |
45 |
50 |
60 |
70 |
Рамка, I,мА |
10 |
10 |
10 |
10 |
10 |

Рис. 2.3. – график ухода гироскопов без коррекции на качающемся основании
Таблица 2.2 – значения при уходе платформы на качающемся основании со включенной коррекции
№ |
1 |
2 |
3 |
4 |
5 |
6 |
Гироскопы, I,мА |
80 |
100 |
110 |
90 |
200 |
200 |
Рамка, I,мА |
88 |
70 |
80 |
70 |
80 |
200 |

Рис. 2.4. – график ухода гироскопов с автокоррекцией на качающемся основании
Таблица 2.3 – значения реакции рамки и гироскопов при задании крайне левого положения
t, сек |
136 |
126 |
95 |
70 |
85 |
Гироскопы, I,мА |
60 |
70 |
50 |
60 |
70 |
Рамка, I,мА |
200 |
200 |
200 |
200 |
200 |
Рис. 2.5. – график реакции рамки и гироскопов при задании крайне левого положения
Таблица 2.3 – значения реакции рамки и гироскопов при задании крайне правого положения
t, сек |
62 |
66 |
70 |
63 |
75 |
Гироскопы, I,мА |
30 |
30 |
20 |
30 |
35 |
Рамка, I,мА |
200 |
200 |
200 |
200 |
200 |

Рис. 2.5. – график реакции рамки и гироскопов при задании крайне правого положения
Вывод
В данной лабораторной работе был исследован спаренный гироскоп и его реакция на внешние воздействия (качающийся стол). Были рассмотрены уходы гироскопов при повышении скорости качания со включенной и выключенной автокоррекцией. Из графиков видно, что при отключенной автокоррекции рамка не меняет своего положения, датчик угла придерживается одного положения и амперметр показывал одни и те же показания, когда же датчик угла гироскопов изменяется при повышении скорости качающего стола. Если включить автокоррекцию, то при изменении угла ДУ() – подается импульс на стабилизирующий двигатель и посредством прецессии рамки происходит выравнивание гироскопов. Показатели >200мА на ДУ() говорят о том, что рамка гироскопа сложилась и утратила степень свободы. Показатели >200мА на ДУ() говорят о том, что гироскоп отклонился на такой угол, что коснулся рамки и утратил степень свободы.