

LR1
.docxМИНОБРНАУКИРОССИИ
САНКТ-ПЕТЕРБУРГСКИЙГОСУДАРСТВЕННЫЙ ЭЛЕКТРОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
«ЛЭТИ»ИМ.В.И.УЛЬЯНОВА(ЛЕНИНА)
КафедраЛИНС
ОТЧЕТ
полабораторнойработе№1
«ИССЛЕДОВАНИЕГИРОСКОПИЧЕСКОГОИНТЕГРАТОРА»
подисциплине«Стабилизированныеплатформы»
-
Студентыгр.0584
ИвановаА.А
Чащин.Д
Преподаватель
ГупаловВ.И
Санкт-Петербург2024
Цельработы
Ознакомление с конструкцией гироскопического интегратора, закреплённым на поворотном столе. Знакомство с методами описания его устройства,получениенавыковвыполнениянаучно-исследовательских работ с ним.
Порядоквыполненияработы
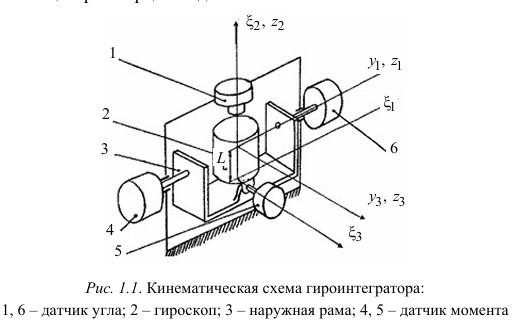
Внимательно осмотреть интегратор, обратив внимание на конструктивное оформление следующих его узлов и деталей: гироскопа с наружнойрамкой,опоросикожуха,датчиковугламежрамочнойкоррекциии момента, токоподводов к наружной рамке и кожуху.
Внимательно осмотреть интегратор, обратив внимание на конструктивное оформление следующих его узлов и деталей: гироскопа с наружнойрамкой,опоросикожуха,датчиковугламежрамочнойкоррекциии момента, токоподводов к наружной рамке и кожуху.
Включитьтумблеры13,11,12,16,18.
Послеразгонагироскопаразарретироватьприбориубедиться,чторамка интегратора прецессирует по часовой стрелке (если смотреть сверху).
Ось вращения наружной рамки установить вертикально. Для этого по вернуть поворотныйстол вокруг его горизонтальной оси так, чтобы на шкале было 90°.
Определитьпорогчувствительностиинтеграторакускорениям. Для этого:
поворотныйстолповернутьвокругегогоризонтальнойосина90°так,чтобы ось наружной рамки приняла горизонтальное положение (показание шкалы стола должно быть 0);наблюдать за движением наружной рамки. Если она повернетсянаугол180°менеечемза5мин,изменитьуголнаклонатак,чтобы, вращаясьвтомженаправлении,наружнаярамкаповернуласьна180°неменее чем за 5 мин. За писать показание шкалы стола (). Изменить угол наклона столатак,чтобынаружнаярамкаповернуласьвпротивоположном
направлениина180°такженеменеечемза5мин.Вкаждомслучаеизмерения проводить по 5 раз для последующей статистической обработки результатов.
Определениекоэффициентапередачиинтегратора:
наклонный стол медленно повернуть относительно найденного начального положения на 90° так, чтобы ось наружной рамки была направленавертикально;
наклонный стол установить последовательно на углы 60, 45, 30, 15° и произвести измерения по описанному выше алгоритму.
Кинематическаясхемаинтегратора
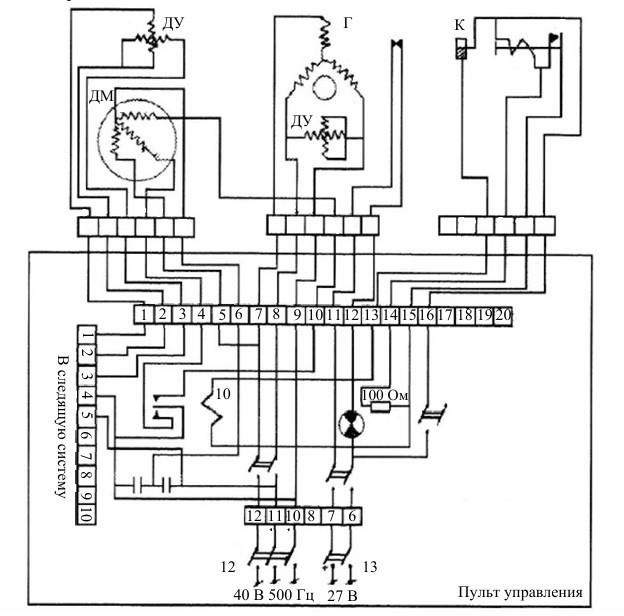
Принципиальнаяэлектрическаясхемаинтегратора
Таблицарезультатовизмерений
Поворотпочасовойстрелке:
Уголнаклонастола,° |
Времяповоротана180° |
3° |
8’11’’ |
15° |
30’’ |
30° |
11’’ |
45° |
7’’ |
60° |
6’’ |
Поворотпротивчасовойстрелке:
Уголнаклонастола,° |
Времяповоротана180° |
3° |
8’33’’ |
15° |
23’’ |
30° |
10’’ |
45° |
7’’ |
60° |
7’’ |
Расчётыпорогачувствительностиинтеграторакускорениямикоэффициента передачи интегратора
Порогчувствительностиоцениваетсяпоформуле
wк0,5g(12),
(1.6)
где1и2–углынаклонаинтегратораотносительноплоскостигоризонта,прикоторых
 возникаетустойчиваяпрецессиярамкивпротивоположныхнаправлениях.
Дальнейшая обработка производится по
формулам
возникаетустойчиваяпрецессиярамкивпротивоположныхнаправлениях.
Дальнейшая обработка производится по
формулам
n

nx;Dx1n(x
x)2;
D;xtx,
(1.7)
n1
i ![]() x
x
i1
 гдеx–полуширинадоверительногоинтервала;t–квантильраспределенияСтьюдента.
гдеx–полуширинадоверительногоинтервала;t–квантильраспределенияСтьюдента.
Значениеkрассчитатьпо формуламk,
к
кgtsin.Статистические
характеристикиkопределяютсяпоформулам(1.7).
ПроверитьгипотезуонезначимостирасхождениймеждувыборочнымидисперсиямиD
приразныхпоформуле
 q maxx .
q maxx .
(1.8)



x1 x2
РасхождениемеждувыборочнымиDсчитаетсянезначимым,если
qq1p,
(1.9)
гдеq1p–квантильраспределенияКохранадляусловиязначимостиpичисластепеней
свободыfn1.КвантильраспределенияКохрана дляуровнязначимости0,05,числа
степенейсвободы4принятьравным0,54.
Вслучаевыполненияусловия(1.9),рассчитатьгенеральныестатистические характеристики данных эксперимента по формулам
1mx;Dx1 n(x )2; D;xtx,
m
m1





![]() jj1
jj1
j x
j1
гдеm– числофиксированныхзначенийугла.
Проверитьгипотезуонезначимостивлиянияфакторанаклонаосинаружнойрамки интегратора по формуле
mDx
D
F1p(f1,f2),
(1.10)
гдеF1p–квантильраспределенияФишерадляуровнязначимостиpичисластепеней
 свободыf1m1иf2m(n1);Dx–генеральнаядисперсия;D
свободыf1m1иf2m(n1);Dx–генеральнаядисперсия;D
средневзвешеннаядисперсия,определяемаяпоформуле
m
xjj1
(1.11)
КвантильраспределенияФишерадлязначимости0,05,числастепенейсвободы
f14,
f220,n5принятьравным2,9.
Определитьскорректированноезначениегенеральнойдисперсии:
DxDxD.
𝑤3=0.5*9.8*(8.11-8.23)=-1.078
𝑤15=0.5*9.8*(30-23)=34.3
𝑤30=0.5*9.8*(11-10)=4.9
𝑤45=0.5*9.8*(11-11)=0
𝑤60=0.5*9.8*(6-7)=-4.9

Выводыпорезультатамработы
Мы научились снимать показания работы гироскопического интегратора на наклонном столе и вычислять из этих показаний: порог чувствительности, выборочное среднее, дисперсию, полуширину доверительного интервала, средневзвешенную дисперсию.
Контрольныевопросы
Чтотакоегироскопическийинтегратор?Какиеэлементы входятв конструкцию гироинтегратора?
Гироскопический интегратор— это устройство, использующее свойства гироскопа для интеграции по времени определённых параметров, например, угловой скорости или линейного ускорения. Основная задача гироинтегратора заключается в преобразовании угловых скоростей или ускорений в величины, характеризующие угол поворота или перемещение.
Основные элементы конструкциигироинтегратора:
Гироскопический ротор — основной элемент, создающийгироскопический момент.
Рамаподвеса—поддерживаетсвободудвиженияроторавокругзаданных осей.
Датчикиуглаповоротаилискорости—преобразуютмеханические величины в электрические сигналы.
Узел управления и стабилизации — система, обеспечивающаякорректное функционирование устройства.
Крепёжныеэлементы—дляустановкигироинтеграторавсистеме.
Каксвязанылинейнаяскоростьобъектаиуголповоротарамы?От чего зависит коэффициент передачи?
Коэффициентпередачизависитот:
Геометрическихпараметровустройства(например,радиуса между точкой приложения силы и осью вращения).
Чувствительностидатчиковугловогоилилинейногоперемещения.
Электронныхнастроек(усилениеифильтрация).
Массыиинерционныххарактеристикгироскопа.
Чемобусловленыпогрешностигироитергратора? Погрешности гироинтегратора обусловлены:
Систематическимиошибками:
Неправильнаякалибровкаустройства.
Температурныеизменения,влияющиенасвойстваматериалов.
Дрейфгироскопа,вызванныйнеточностямиконструкции. Случайными ошибками:
Шумывизмерительныхдатчиках.
Внешниевибрацииилиудары.
Турбулентныеилинеравномерныедвижения. Динамическими ошибками:
Нелинейностивоткликепривысокихскоростяхвращения.
Асимметриявподвесеилинесбалансированностьротора. Внешними факторами:
Магнитныеполя.
Воздействиегравитации,еслионанеучтенавмодели.