

10. Исследование на лабораторной установке режима срыва слежения в замкнутой нелинейной системе по варианту в программе Simulink
а) Получим S – образную статическую характеристику нелинейной части.
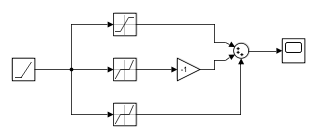
Рисунок 89 – Модель нелинейной части системы
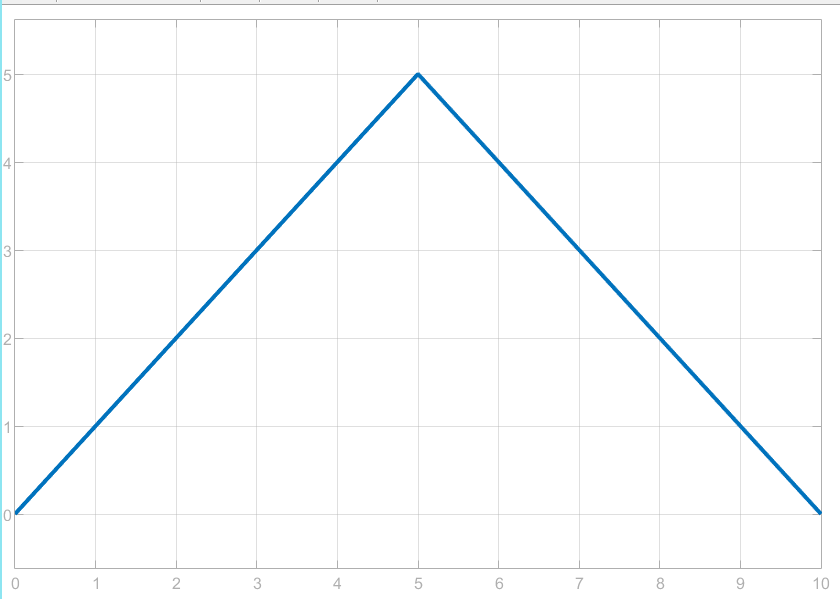
Рисунок 90 – S-образная статическая характеристика нелинейной части
б) Соберем на лабораторной установке полную замкнутую систему с нелинейной частью и, подавая на вход системы линейно возрастающее и ступенчатое воздействия, а также их сумму, определим границы рабочей зоны системы.
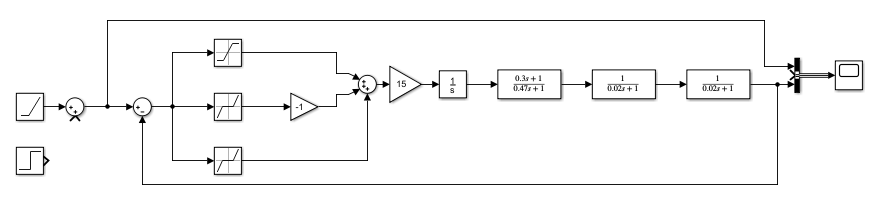
Рисунок 91 – Модель полной замкнутой нелинейной системы при подаче на вход линейно возрастающего воздействия
Пусть А – амплитуда задающего воздействия. При А=53,92:

Рисунок 91 – Характеристика l(t) на выходе нелинейной системы
При А=53,93:

Рисунок 92 – Характеристика l(t) на выходе нелинейной системы
Следовательно, срыв слежения происходит при A=53,93.
Замкнутая система со ступенчатым воздействием на входе:
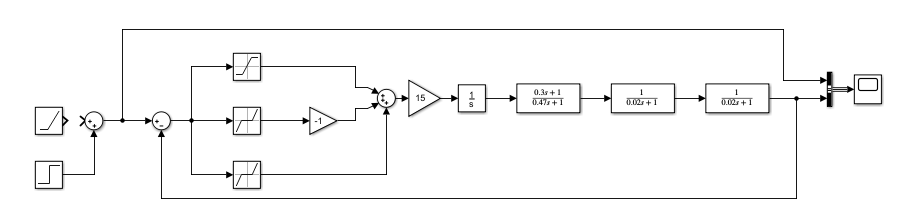
Рисунок 93 – Модель полной замкнутой нелинейной системы при подаче на вход ступенчатого воздействия
При А=9,7:
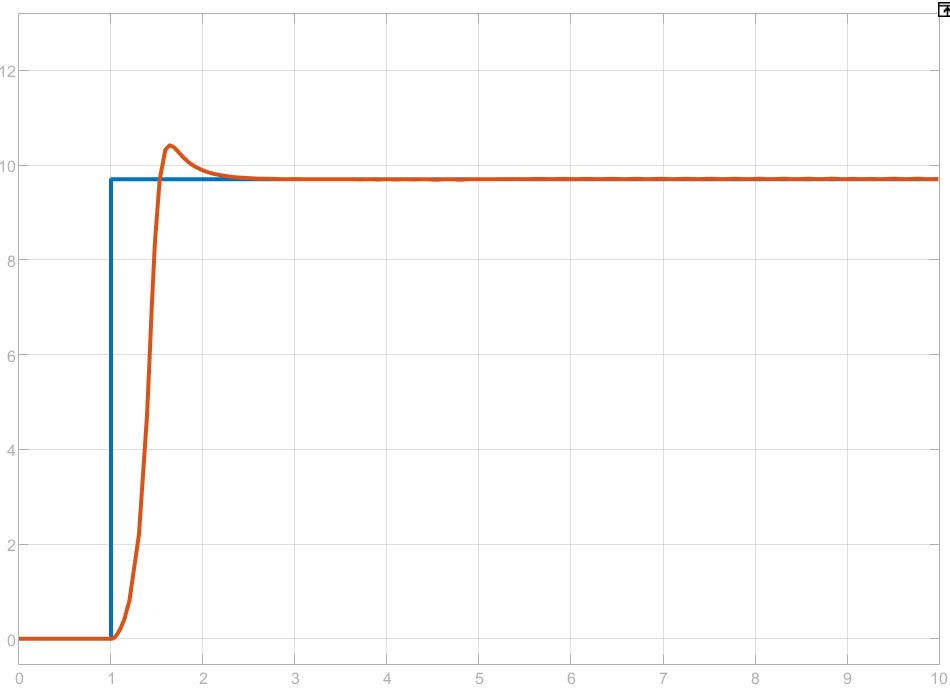
Рисунок 94 – Характеристика h(t) на выходе нелинейной системы
При А=10:
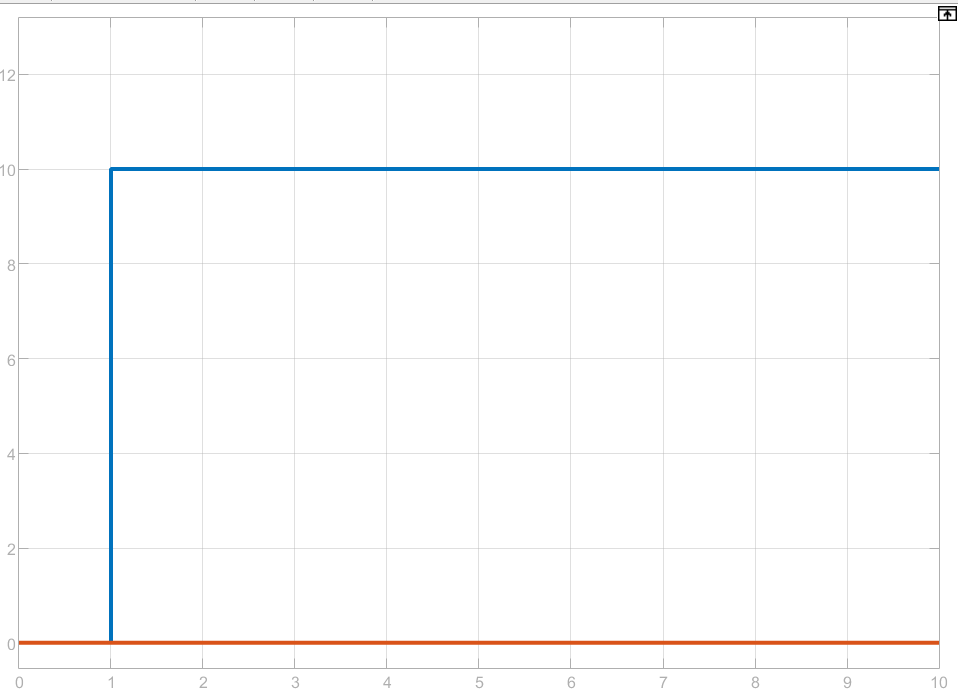
Рисунок 95 – Характеристика h(t) на выходе нелинейной системы
Cрыв слежения происходит при A=10.
Замкнутая система с суммой линейно возрастающего и ступенчатого воздействий на входе:
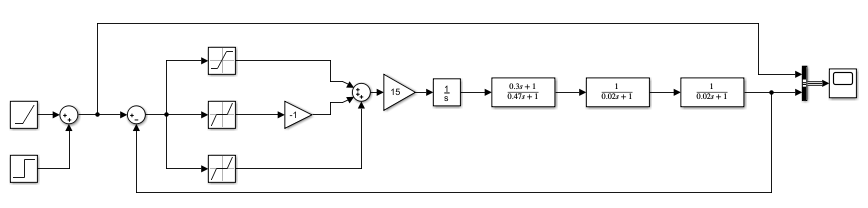
Рисунок 96 – Модель полной замкнутой нелинейной системы при подаче на вход суммы ступенчатого и линейно возрастающего воздействия
При Аступ=3 Алин=51,6:
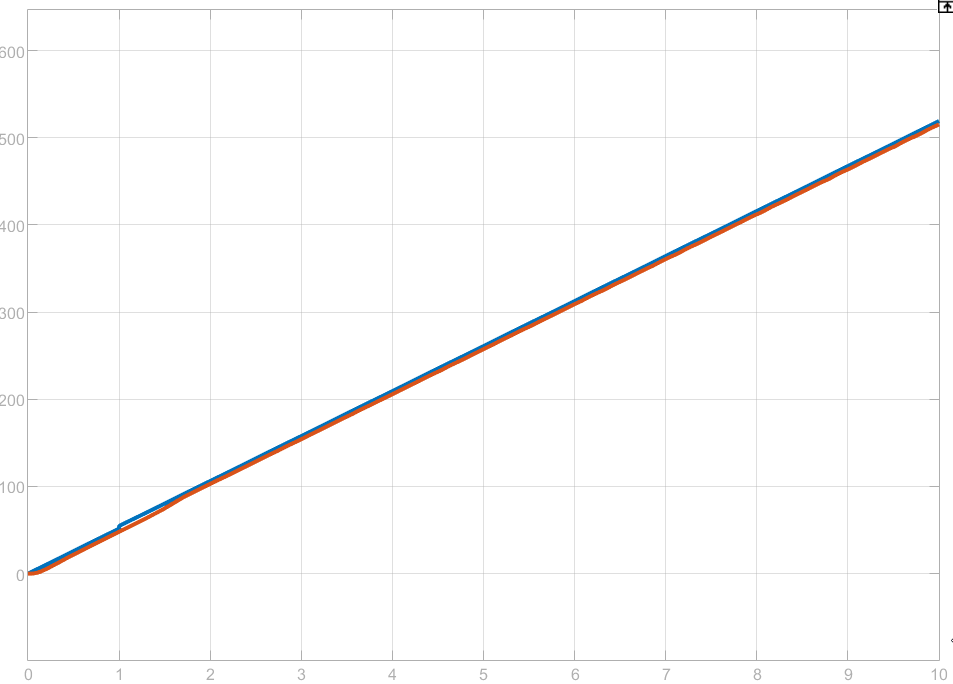
Рисунок 97 – Характеристика на выходе нелинейной системы
При Аступ=6 Алин=29,5:
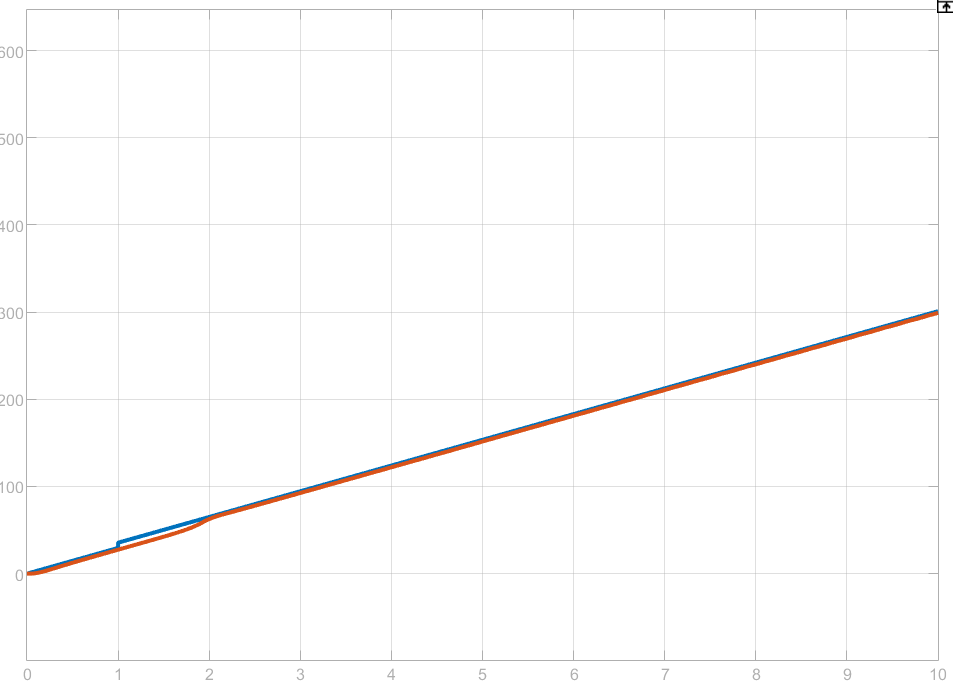
Рисунок 98 – Характеристика на выходе нелинейной системы

Рисунок 99 - Границы рабочей зоны системы.
Составим импульсную систему, путем добавления к скорректированной системе импульсного п-образного элемента:
Составим импульсную систему, путём добавления к скорректированной системе импульсный П-образный элемент.
Передаточная функция желаемой системы:

Передаточная функция формирующего элемента:

Передаточная функция непрерывной части системы:
Чтобы
записать
 ,
представим
,
представим
 в виде суммы элементарных дробей,
используя метод неопределенных
коэффициентов.
в виде суммы элементарных дробей,
используя метод неопределенных
коэффициентов.

Составим систему уравнений, чтобы определить коэффициенты A, B, C, D, F:

Решим полученную систему равнений и найдём коэффициенты A, B, C, D, F:


Произведем W преобразование:

Воспользовавшись
программой MathCad,
найдём корни числителя и знаменателя
получившейся дроби для
 и запишем функцию:
и запишем функцию:

Корни знаменателя:
 ;
;

Корни числителя:
;




Приведем к стандартному виду:


Корни знаменателя:
;

Корни числителя:
;



Приведем к стандартному виду:


Корни знаменателя:
;

Корни числителя:
;




Приведем к стандартному виду:

Построим
ЛАЧХ и ЛФЧХ для значений
 :
:
Произведем Z преобразование:


Рассчитаем
ошибку и переходную характеристику для
значения
 :
:
Раскроем
скобки и подставим значения
 .
.
Запишем передаточную функцию.

Рассчитаем установившуюся ошибку в замкнутой импульсной системе:



Тогда:

Рассчитаем переходный процесс и построим импульсную характеристику.
Поделив числитель на знаменатель для каждой передаточной функции, получим коэффициенты C.
При


 Рисунок
100
–
Импульсная характеристика
Рисунок
100
–
Импульсная характеристика
Рассчитаем
ошибку и переходную характеристику для
значения
 :
:
Раскроем скобки и подставим значения .
Запишем передаточную функцию.

Рассчитаем установившуюся ошибку в замкнутой импульсной системе:

Тогда:

Рассчитаем переходный процесс и построим импульсную характеристику.
Поделив числитель на знаменатель для каждой передаточной функции, получим коэффициенты C.
При


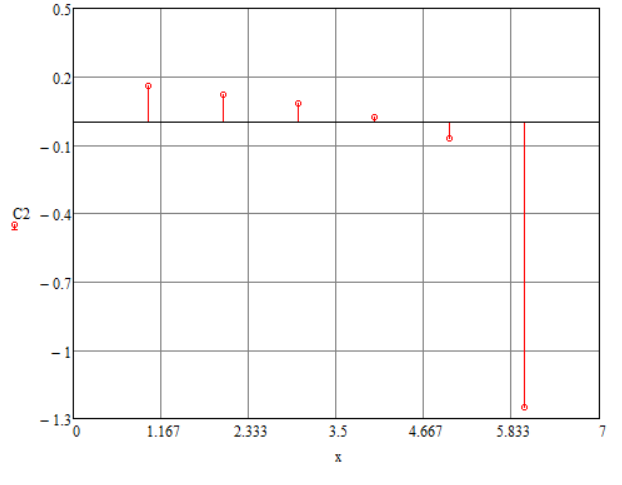 Рисунок
101
– Импульсная характеристика
Рисунок
101
– Импульсная характеристика
Рассчитаем
ошибку и переходную характеристику для
значения
 :
:
Раскроем скобки и подставим значения .
Запишем передаточную функцию.

Рассчитаем установившуюся ошибку в замкнутой импульсной системе:

Тогда:

Рассчитаем переходный процесс и построим импульсную характеристику.
Поделив числитель на знаменатель для каждой передаточной функции, получим коэффициенты C.
При


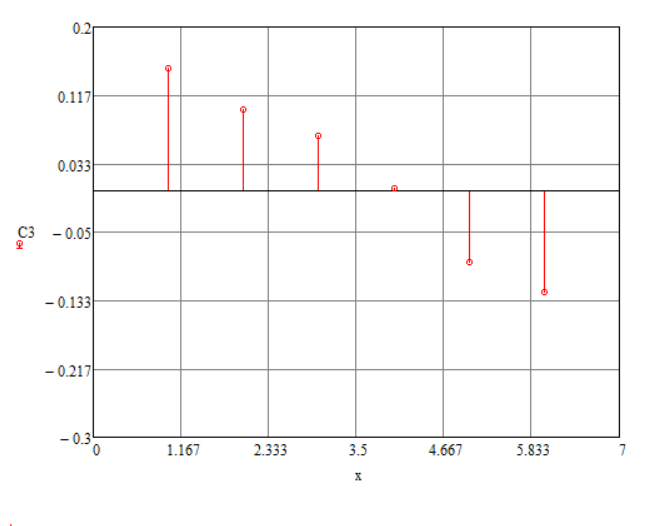 Рисунок
102
– Импульсная характеристика
Рисунок
102
– Импульсная характеристика