

Исследование показателей качества замкнутой системы, корректирования динамических свойств исходной системы и исследование скорректированной системы
Дано:










Максимальная производная входного сигнала равна единице:

Определим минимальный порядок астатизма системы:

Минимальный коэффициент усиления:





Выберем
 рад/с
рад/с

Параметры желаемой системы:








Построим передаточную характеристику желаемой системы:

Выражение для корректирующего звена:

















 хМ.в.1
хМ.в.1
 хМ.в.2
хМ.в.2

Рисунок 65 – Блок-схема системы после коррекции
Рассчитаем значения ошибок при детерминированных мешающих воздействиях, приложенных к выходу системы Xмв2(t) и к выходу дискриминатора Xмв1(t):



В частотной области:



Пересчитаем на входную систему:




В частотной области:


Суммарная ошибка:

Средняя квадратическая ошибка системы под воздействием помех:



Преобразуем подынтегральное выражение к виду:

Тогда:

Так
как максимальная степень полинома
знаменателя
 , то для вычисления интеграла
, то для вычисления интеграла
 :
:
-
Коэффициенты знаменателя
Коэффициенты числителя
a0 =

b0 = 0
a1 =

b1 = 0
a2 =

b2 =

a3 =

b3 = 1
a4 =




Исследование переходной характеристики системы при ступенчатом задающем воздействии:

Рисунок 66 – Модель скорректированной замкнутой системы
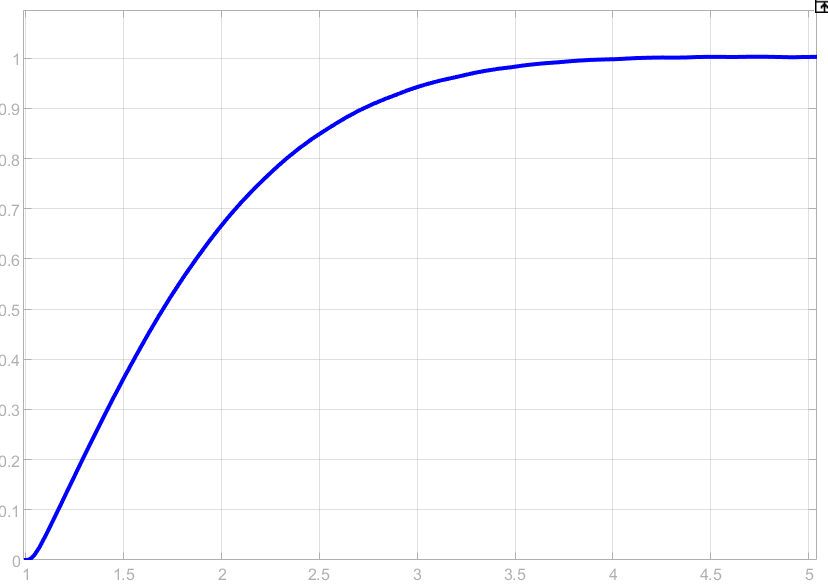
Рисунок 67 – Переходный процесс при ступенчатом входном воздействии
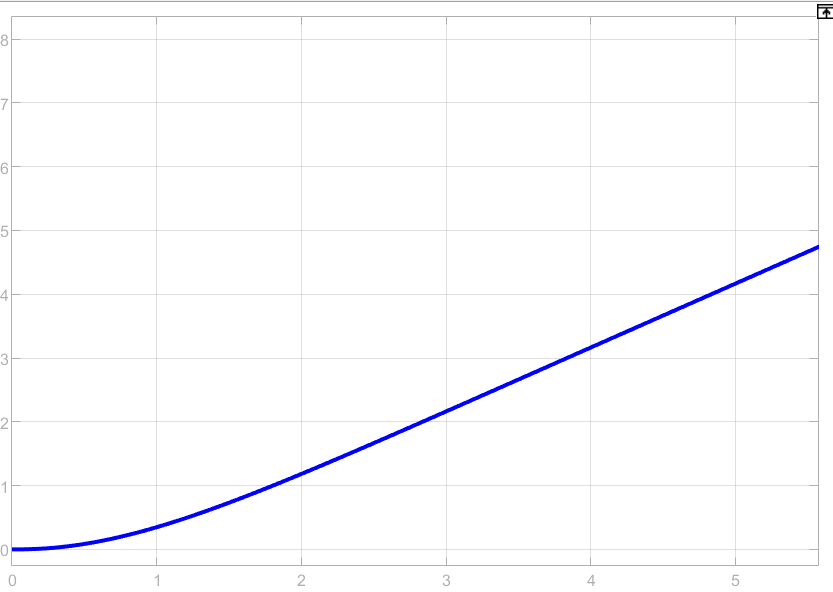
Рисунок 68 – Переходная характеристика при линейном входном воздействии
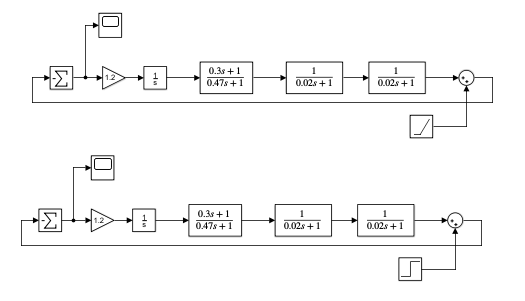
Рисунок 69 – Модель скорректированной системы с мешающим воздействием
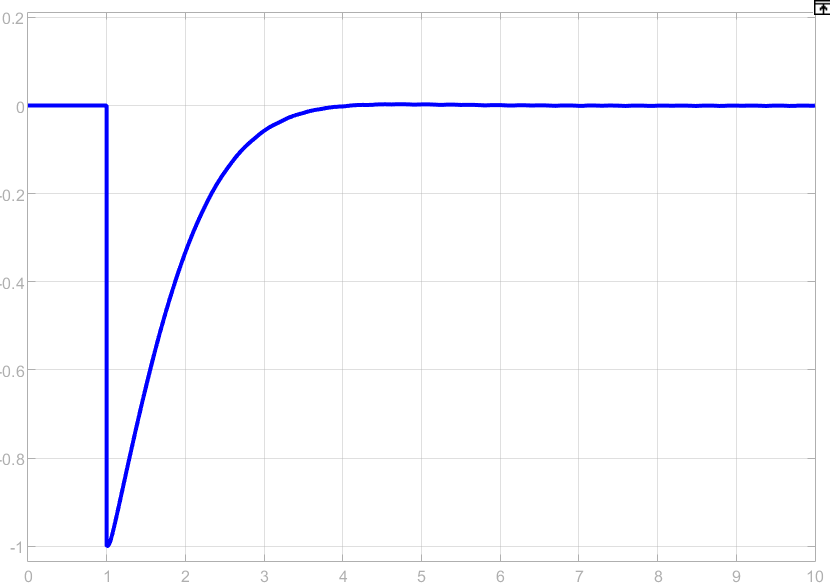
Рисунок 70 – Переходная характеристика сигналов ошибок при ступенчатом мешающем воздействии

Рисунок 80 – Переходная характеристика сигналов ошибок при линейном входном воздействии
9. Расчет скорректированной системы по варианту после включения в нее нелинейного звена. Систему при этом рассматриваем как непрерывную и нелинейную.
а)
рассчитаем и построим эквивалентные
нормированные коэффициенты передачи
 и
и
 для нелинейного звена НЗ1
с
S-образной
треугольной характеристикой и нелинейного
звена НЗ2
– звена с линейной зоной и насыщением.
для нелинейного звена НЗ1
с
S-образной
треугольной характеристикой и нелинейного
звена НЗ2
– звена с линейной зоной и насыщением.
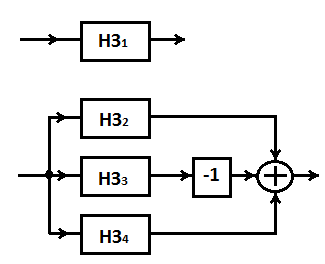
Рисунок 81 – Схема скорректированной системы с включением нелинейных звеньев
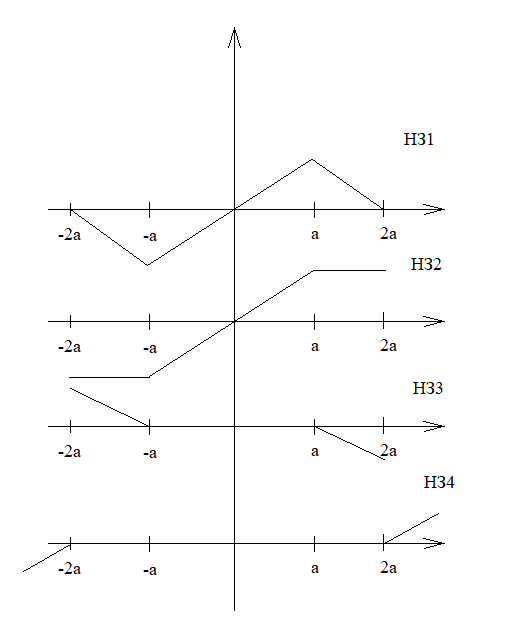
Рисунок 82 – S-образные статические характеристики нелинейных звеньев
Представим нормированный коэффициент передачи нелинейного звена НЗ1 в виде суммы:




Тогда для первого нелинейного звена:


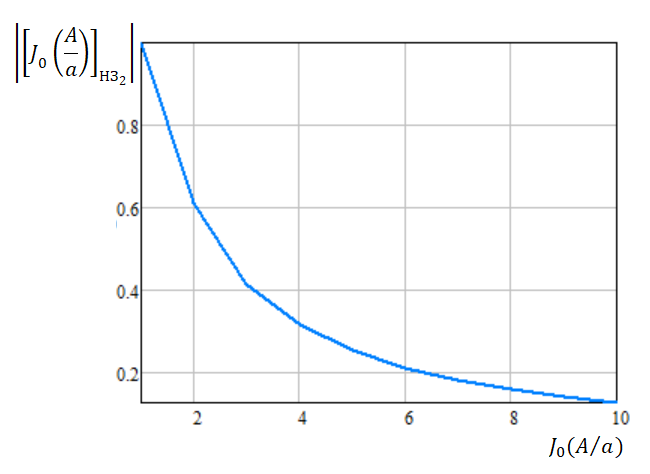
Для второго нелинейного звена:

Для анализа возможности возникновения автоколебаний данную выше величину необходимо перевести в логарифмический масштаб.
Составим таблицу рассчитанных значений для каждого из представленных в задании звеньев.
Таблица 9. Рассчитанные значения коэффициентов для каждого из нелинейных звеньев
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
1,69 |
0,22 |
0,05 |
0,02 |
0,01 |
6,02 |
3,77 |
2,52 |
1,76 |
1,28 |
|
0,59 |
4,59 |
19,25 |
47,79 |
95,14 |
166 |
265,2 |
397,36 |
567,2 |
779,46 |
|
-4,58 |
13,23 |
25,69 |
33,59 |
39,57 |
44,4 |
48,37 |
51,98 |
55,08 |
57,84 |
|
1 |
0,61 |
0,42 |
0,32 |
0,25 |
0,21 |
0,18 |
0,16 |
0,14 |
0,13 |
|
1 |
1,64 |
2,4 |
3,18 |
3,95 |
4,73 |
5,52 |
6,3 |
7,08 |
7,87 |
|
0 |
4,31 |
7,61 |
10,04 |
11,94 |
13,51 |
14,83 |
15,99 |
17,01 |
17,97 |








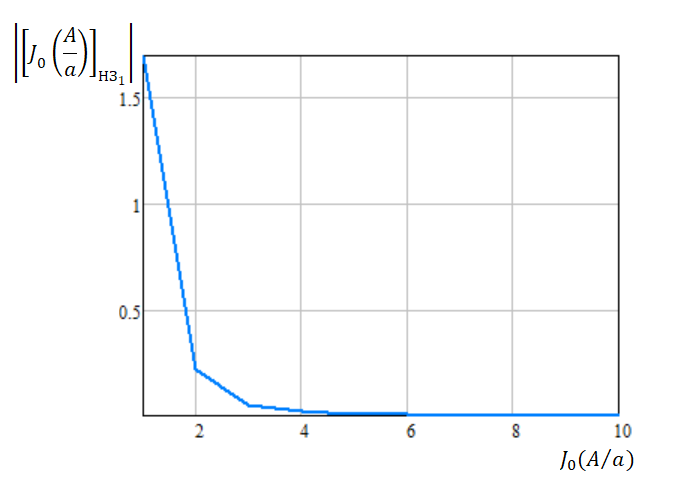
Рисунок
83 – График
модуля эквивалентного нормированного
коэффициента передачи
 звена
звена

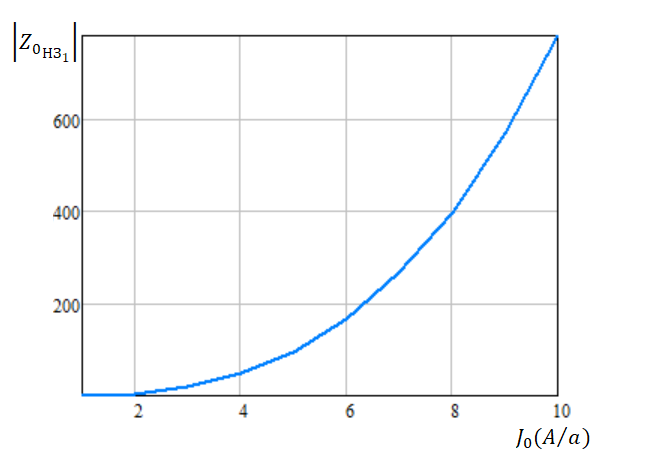
Рисунок
84 – График модуля
 звена
звена

Рисунок
85– График
 звена
звена
Рисунок
86 – График
модуля эквивалентного нормированного
коэффициента передачи
звена

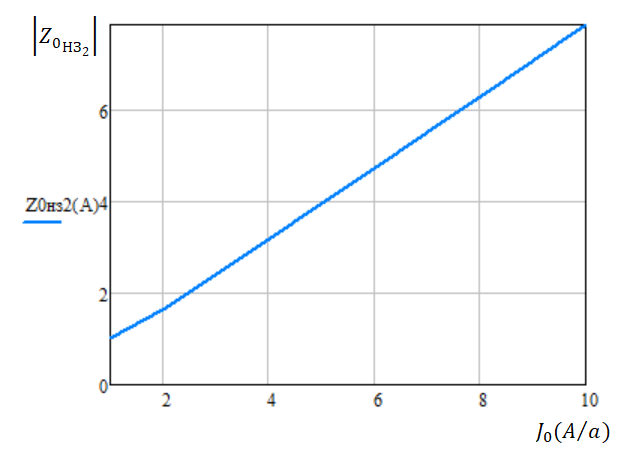
Рисунок 87 – График модуля звена
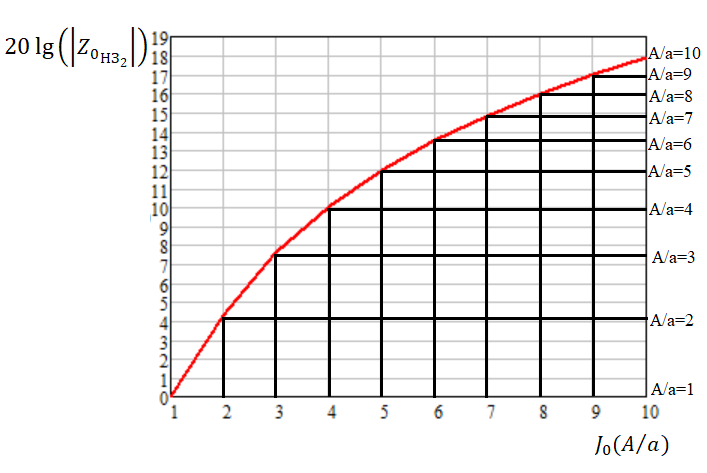
Рисунок 88 – График звена
б) проверяем методом гармонического баланса, используя логарифмическую плоскость, возможно ли возникновение автоколебаний в нелинейной системе по варианту, а если при параметрах желаемой системы автоколебания невозможны, то указываем минимально возможный коэффициент усиления скорректированной системы или Кна, при котором они возможны.
Согласно методу гармонического баланса, автоколебания в замкнутой системе возможны в том случае, если выполняются условия баланса фаз и баланса амплитуд (усиления):

Передаточная функция желаемой характеристики имеет вид:

Проверим выполнение условий баланса фаз и баланса амплитуд для системы с характеристикой:



При соблюдении
баланса по фазе, у нас не соблюдается
баланс по амплитуде. Из этого следует,
что автоколебаний в системе не будет.
Найдем такой коэффициент усиления
 ,
при котором будут выполняться оба
условия.
,
при котором будут выполняться оба
условия.


Условия
баланса фаз и амплитуд выполняются.
Определим амплитуду автоколебаний.
Зная из задания, что
 от
от
 ,
а зона линейности равна
,
а зона линейности равна
 ,
амплитуда автоколебания:
,
амплитуда автоколебания:

Рассчитаем для системы с S-образной треугольной характеристикой предельные значения задающего воздействия:
 В
В
 В
В
 В
В