

2. Определение времени восстановления гироскопа из завалов на 30°
(Эффективность работы коррекции)
Сигнальный флажок должен быть убран из зоны окна с лицевой стороны прибора.
Завал гироскопа создаётся следующим образом. Корпус прибора поворачивают вместе с кольцом установки относительно продольной оси авиагоризонта на угол ~80°. После этого, продолжая плавно поворачивать корпус, внимательно следить за горизонтальной планкой («горизонтом»), которая при соприкосновении внешней рамки гироузла с корпусом прибора начнёт двигаться вверх или вниз. Планка должна переместиться на угол 30-35° (величина угла определяется приблизительно). Затем кольцо с прибором вернуть в исходное положение. Точно величина продольного завала контролируется по шкале поперечных кренов. Поворачивая кронштейн относительно вертикальной оси (предварительно отпустив гайку крепления), переводят продольный завал в поперечный, величина которого легко определяется по шкале кренов.
После того, как установлена величина продольного завала (~30°), включить секундомер и замерить время возвращения планки горизонта в исходное положение.
Поперечный завал осуществляется следующим образом; создать продольный завал в 30°. Перевести завал в поперечный описанным выше способом, измерить его величину и включить секундомер.
ОПРЕДЕЛЕНИЕ ВРЕМЕНИ ВРАЩЕНИЯ РОТОРА ПО ИНЕРЦИИ (ВЫБЕРГ)
Выключить питание прибора и одновременно включить секундомер. Замерить время вращения ротора по инерции. Вращение ротора определяется на слух.
АВИАГОРИЗОНТ АГИ-1
Авиагоризонт АГИ-1 также, как и АГБ-2, представляет собой комбинацию двух приборов в одном корпусе: авиагоризонта и указателя скольжения.
АГИ-1 предназначен для определения положения самолёта в пространстве относительно плоскости истинного горизонта (или истинной вертикали) и направления бокового скольжения при любых эволюциях летательного аппарата. Авиагоризонт АГИ-1 как прибор контроля быстро меняющихся эволюций истребителя позволяет точно и приблизительно определить положение самолёта по углам крена и тангажа. Углы тангажа измеряются по меткам, нанесённым на подвижной сферической шкале и находящимся в данный момент времени против центра силуэта самолёта. Углы крена отмеряются по меткам, нанесённым на неподвижный кольцевой экран, находящимися в данный момент времени против меридиана (вертикальной линии, нанесённой на неподвижной сферической шкале). Подвижная сферическая шкала разделена линией искусственного горизонта и окрашена в коричневый и голубой цвет. Метки углов тангажа, помещённые на коричневом фоне, соответствуют движению самолёта к Земле. Метки углов тангажа, помещённые на голубом фоне, соответствуют движению самолёта от Земли.
При углах тангажа, близких к 90° (80-90°), крен прибором не может быть измерен. Эти зоны на сферической шкале обведены кругами. Скольжение самолёта определяется по положению шарика указателя скольжения относительно центральных индексов.
Кинематическая схема прибора
Устойчивость гироскопа АГИ-1 не зависит от положения самолёта по углам крена и тангажа. Это качество прибора необходимо при использовании авиагоризонта на самолётах, имеющих неограниченный диапазон углов крена и тангажа (истребитель).
Схема невыбивающегося гироскопа АГИ-1 приведена на фиг. 8 и 9. Невыбиваемость гироузла обеспечивается наличием дополнительной следящей рамы 3, в которой расположены оси внешней рамы карданова подвеса 2 и контакт 4, являющийся чувствительным элементом взаимного углового положения внутренней 1 и внешней рамы 2.
При кренах самолёта нарушается перпендикулярность между осью гиромотора и осью рамы 2; контакт 4 включает двигатель 6, который, поворачивая раму 3, принуждает раму 2 занять положение, при котором указанные оси взаимно перпендикулярны. При этом устойчивость гироскопа максимальна. Если скорость отработки нового положения рамы 3 выбрана больше скорости креновых эволюций самолёта, перпендикулярность указанных осей будет поддерживаться всё время, и устойчивость гироскопа будет сохраняться максимальной при любых эволюциях.
Наличие указанного качества приводит к тому, что отпадает принципиальная необходимость в арретирующем механизме, и авиагоризонт имеет практически неограниченный диапазон измерения углов крена и тангажа. Для уменьшения виражных погрешностей в приборе предусмотрено отключение поперечной коррекции на виражах. Наличие виража определяется автоматически, но косвенным образом - по крену. Контактное устройство 15 при кренах, превышающих (±9°), отключает поперечную коррекцию.

1 - гироузел; 2 - карданная рама; 3 - следящая рама; 4 - включатель мотора; 5 - контакты включателя; 6 - мотор отработки; 7 - силуэт «самолётик»; 8 - сферическая шкала.
Рис. 8
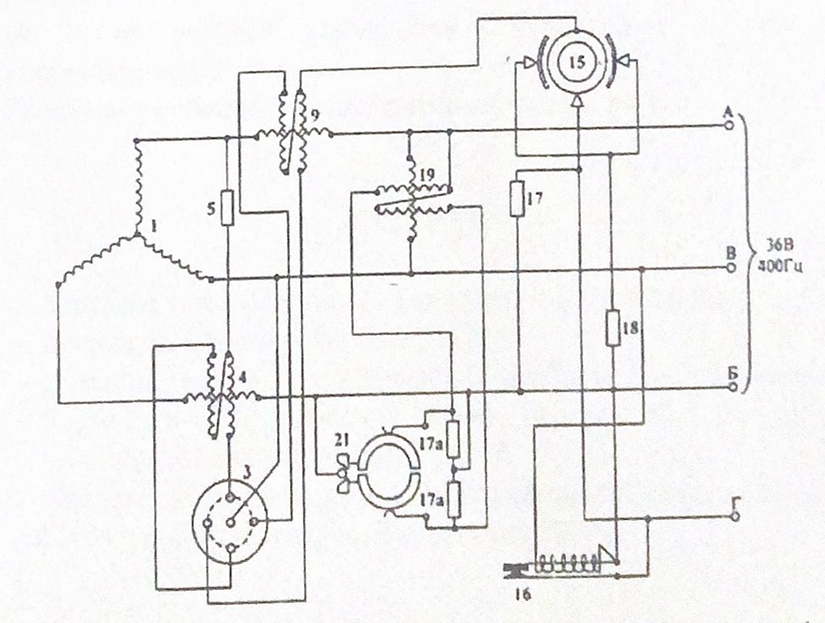
1 - статор гиромотора ГМ-4; 3 - жидкостный маятниковый переключатель; 4 - статор продольного коррекционного мотора; 5 - балластное сопротивление ( 270-510 Ом, 0,5 Вт); 9 - статор поперечного коррекционного мотора; 15 - выключатель коррекции; 16 - биметаллическое реле; 17 - искрогасительное сопротивление (5100 Ом, 0,25 Вт); 18 - балластное сопротивление ( 100-270 Ом, 1 Вт); 19 - статор мотора отработки ДИД-0,5; 21 - включатель отработки; 23 - коммутатор.
Рис-9
ОТЧЁТ ПО ЛАБОРАТОРНОЙ РАБОТЕ «АВИАГОРИЗОНТ»
Отчёт по лабораторной работе должен содержать:
1) Электрическую и кинематическую схемы авиагоризонтов АГБ-2, АГИ-1.
2) Результаты проверки прибора АГБ-2.
3) По результатам проделанной работы сделать заключение о возможности применения каждого из приборов при эволюциях летательных аппаратов.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1) В чём состоит принцип измерения углов крена и тангажа.
2) В чём заключается физическая сущность скоростных погрешностей авиагоризонтов.
3) В чём заключается физическая сущность баллистических девиаций авиагоризонта.
4) Способы уменьшения виражных погрешностей.
5) Как определить величину коррекционного момента при заданном значении кинетического момента, пользуясь данными, полученными в работе.
6) Из каких условий выбирается оптимальное значение величины коррекционного момента.
7) Пояснить особенности электрической схемы АГИ.
ЛИТЕРАТУРА
1) Блаславский, Логунов, Пельпор - Авиационные приборы и автоматы. Машиностроение, 1978 г.
2) Данилин В.П. - Гироскопические приборы, Высшая школа, 1965 г.
3) Михайлов О.И., Козлов А.М., Гергель Ф.С. - Авиационные приборы. Машиностроение, 1977 г.
4) Авиационные приборы и измерительные системы, под ред. В.Г. Воробъёва, Москва, Транспорт, 1981 г.