

5.5. Включение и автоматическая подготовка системы икв к работе.
5.5.1. Перед включением системы ИКВ на пульте управления ПНД-1 переключатели необходимо поставить в следующие положения:
"настр. - рабоч." - "настр."
"ЗК-ГПК-МК" - "ЗК" или МК".
Включением переключателя "вкл. ИКВ", установленного на самолете, в систему ИКВ подаются напряжения:
а) постоянного тока 27 В 10% от бортовой сети;
б) трехфазного переменного тока 36 В. +5/-10 % , 400 Гц 2% от бортовой сети;
в) трехфазного переменного тока 36 В 3 В, 400 Гц 0,1 % от специального источника;
г) однофазного переменного тока 115 В 5 %, 400 Гц 2 % от бортовой сети.
С момента подачи напряжения питания начинается автоматическая настройка системы ИКВ.
Автоматическая настройка происходит в два этапа:
первый - режим ускоренного выхода ("УВ") гироплатформы в горизонт и в азимуте;
второй - режим точного выхода ("ТВ") гироплатформы в горизонт и в азимуте и запоминания дрейфа гироплатформы.
Схема электрическая функциональная представлена на рис. 17.
5.5.2. Режим "УВ" предусмотрен для быстрого согласования положения гироплатформы с датчиками акселерометров относительно корпуса курсовертикали КВ-1 и в азимуте по одному из выбранных направлений. В этом режиме для быстрого согласования гироплатформы относительно корпуса (рис. 17) сигналы с синусных обмоток статоров
СКТ-датчиков тангажа и крена курсовертикали поступают на входы фильтров стабилизации. Соответствующие датчики момента отрабатывают гироплатформу и одновременно поворачивают роторы СКТ-датчиков тангажа и крена относительно их статоров до такого положения, при котором сигналы с синусных обмоток статоров становятся минимальными.
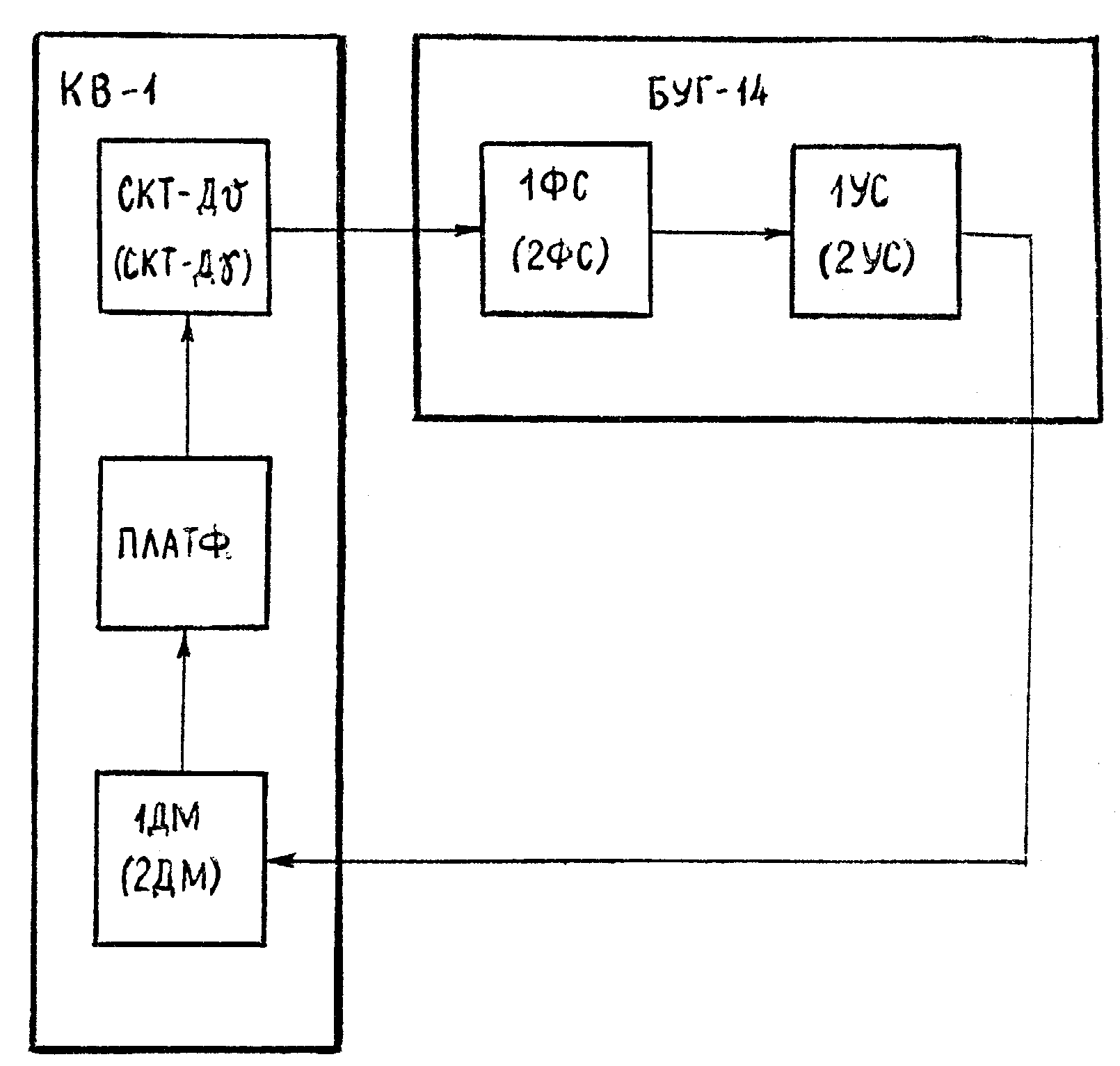
Рис. 17. Упрощённая функциональная схема канала тангажа (крена) в режиме «УВ».
Напряжение постоянного тока 27 В с пульта управления ПНД-1 ("+27 В настройка") через диод Д14 и размыкающие контакты реле Р19 блока БУГ-14 ("+27 В УВ") поступают на обмотки реле Р1 (Р2), Р4 (Р5), Р10 (Р11) БУГ-14 (рис. 18).
Сигнал с синусной обмотки статора СКТ-датчика тангажа (крена) через замыкающие контакты Р4 (Р5) поступает на усилитель 1УС (2УС) и затем на соответствующий датчик момента 1ДМ (2ДМ) курсовертикали КВ-1, который отрабатывает гироплатформу с датчиками акселерометров до положения, при котором сигнал с СКТ-датчика на входе усилителя станет минимальным.
В этом режиме внешняя рама крена выставляется по корпусу КВ-1 по сигналам с синусной обмотки СКТ-датчика внешней рамы крена (рис. 15, 17). Сигнал с синусной обмотки СКТ-датчика внешней рамы крена (внеш.) поступает через замыкающие контакты реле Р8 БУГ-14 на ФВР, а с выхода ФВР на УВР и далее на датчик момента ДМ-3, который отрабатывает внешнюю раму до тех пор, пока сигнал с СКТ-датчика внешней рамы крена не станет равным нулю.
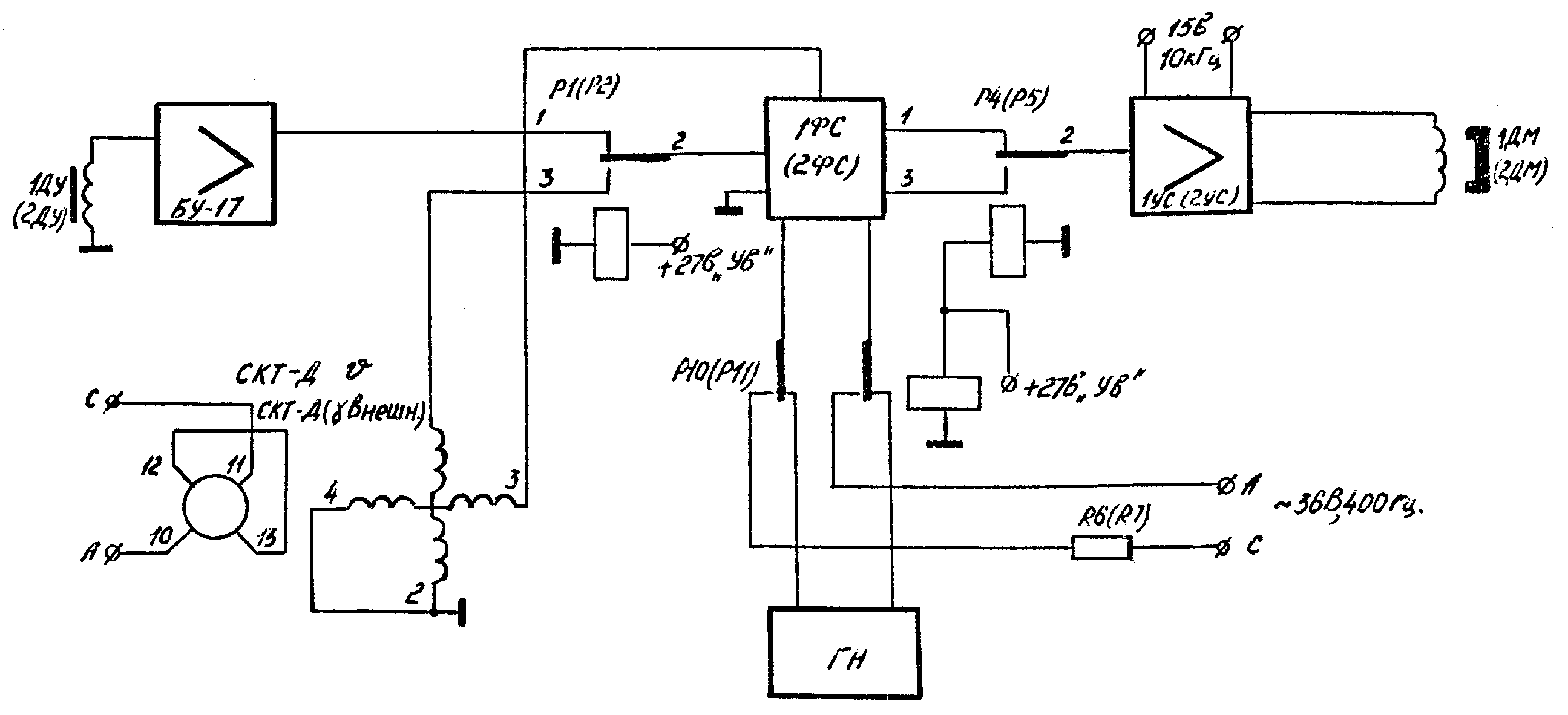
Рис. 18. Функциональная схема канала тангажа (крена) в режиме «УВ».
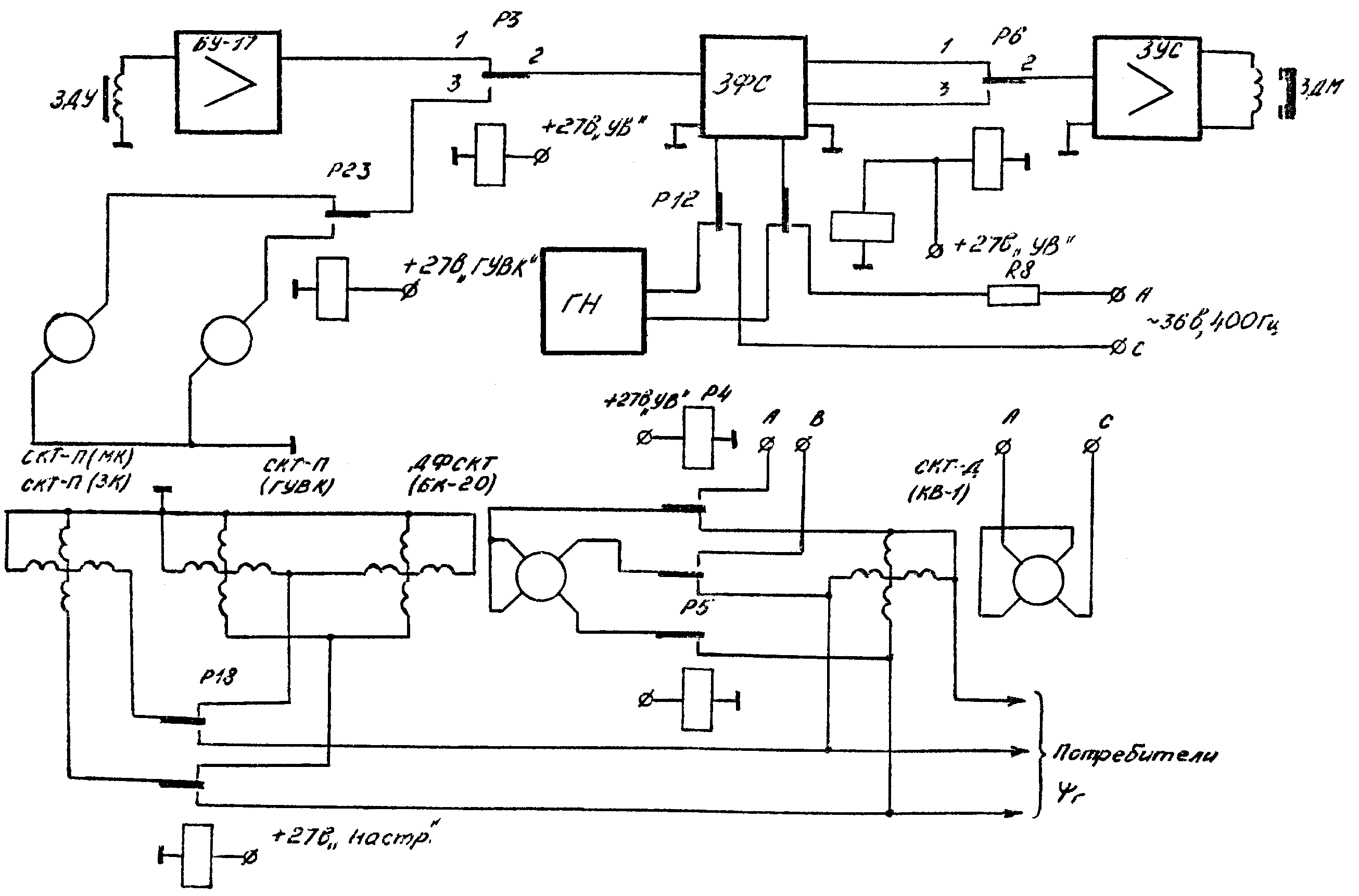
Рис. 19. Функциональная схема канала курса в режиме «УВ».
5.5.3. В режиме "УВ" гироплатформа в азимуте выставляется по одному из направлений:
- по направлению магнитного меридиана;
- по направлению географического меридиана;
- по заданному направлению от коррекционного механизма или от внешнего устройства, определяющего курс (типа ГУВК).
Гироплатформа в азимуте выставляется таким образом, что ось О совмещается с выбранным направлением. Статорные обмотки СКТ-датчика КВ-1 подсоединяются к статорным обмоткам СКТ-приемника задатчика курса (КМ, АК или ГУВК), сигнал с роторной обмотки этого СКТ-приемника поступает на 3ФС (рис. 19), затем на вход 3УС, а с его выхода на датчик момента ДМ10, который отрабатывает платформу в азимуте и одновременно ротор СКТ-датчика КВ-1 относительно статора до такого положения, при котором СКТ-датчик КВ-1 будет согласован с СКТ - приемником задатчика курса.
5.5.4. Ускоренная выставка гироплатформы по направлению магнитного меридиана осуществляется по сигналам с индукционного датчика, как описано в п. 5.3.2. Для ускоренной выставки гироплатформы по направлению магнитного меридиана переключатель "ЗК-ГПК-МК" на пульте управления ПНД-1 необходимо поставить в положение "МК", при этом СКТ-приемник коррекционного механизма подключается к СКТ-датчику курса КВ-1.
Кроме того в режиме "УВ" напряжение 27 В подается на обмотки реле Р3, Р6, Р12 БУГ-14 и Р4, Р5, Р18 БК-20 (рис. 19).
Статор СКТ - приемника коррекционного механизма СКТ-П (МК) через замыкающие контакты реле Р18 подключается к статору СКТ-датчика курса ВК-1.
Сигнал рассогласования СКТ- приемника КМ-2 серия 1 и СКТ-датчика КВ-1 через размыкающие контакты реле Р23 и замыкающие контакты реле Р3 подается на вход фильтра 3ФС и далее через замыкающие контакты реле Р6 на вход усилителя стабилизации 3УС, с выхода усилителя на датчик момента 3ДМ КВ-1, который отрабатывает гироплатформу в азимуте до положения, при котором ось О гироплатформы направлена по магнитному меридиану.
5.5.5. Для выставки гироплатформы по направлению географического меридиана в КМ-2 серия 1 кремальерой на шкале "Склонение" вводится магнитное склонение места вылета самолета. Выставка гироплатформы по направлению географического меридиана осуществляется, как описано в п. 5.5.4.
5.5.6. Для выставки гироплатформы по заданному направлению переключатель "ЗК-ГПК-МК" на ПНД-1 необходимо поставить в положение "ЗК". При этом напряжение 27 В поступает на обмотки реле РЗ-Р6 КМ, статорные обмотки СКТ-приемника КМ подключаются к статорным обмоткам СКТ-датчика курса КВ-1. Необходимое значение курса, по которому должна быть выставлена гироплатформа, устанавливается с помощью кремальеры КМ по шкале "Склонение".
Выставка гироплатформы по заданному направлению осуществляется, как описано в п. 5.5.4.
5.5.7. При выставке гироплатформы от внешнего устройства, определяющего курс (типа ГУВК), к статорным обмоткам СКТ-датчика курса КВ-1 подключаются статорные обмотки СКТ- приемника ГУВК (переключатель "ЗК-ГПК-МК" на ПНД-1 должен находиться в положении "ЗК" или "МК"). Напряжение 27 В от внешнего устройства подается на обмотку реле Р23 БУГ-14, при этом на входе фильтра ЗФС через замыкающие контакты реле Р23 поступает сигнал с ротора СКТ- приемника внешнего устройства. Выставка гироплатформы в азимуте по заданному внешним устройством курсу осуществляется аналогично описанной в п. 5.5.4.
5.5.8. В режиме "УВ" предусмотрено "обнуление" блока БГМК-4 прибора БК-20 для отработки ротора ДФСКТ относительно его статора в такое положение, при котором поступающие на ротор ДФСКТ сигналы курса трансформируются в статорные обмотки без какой-либо поправки на их значение.
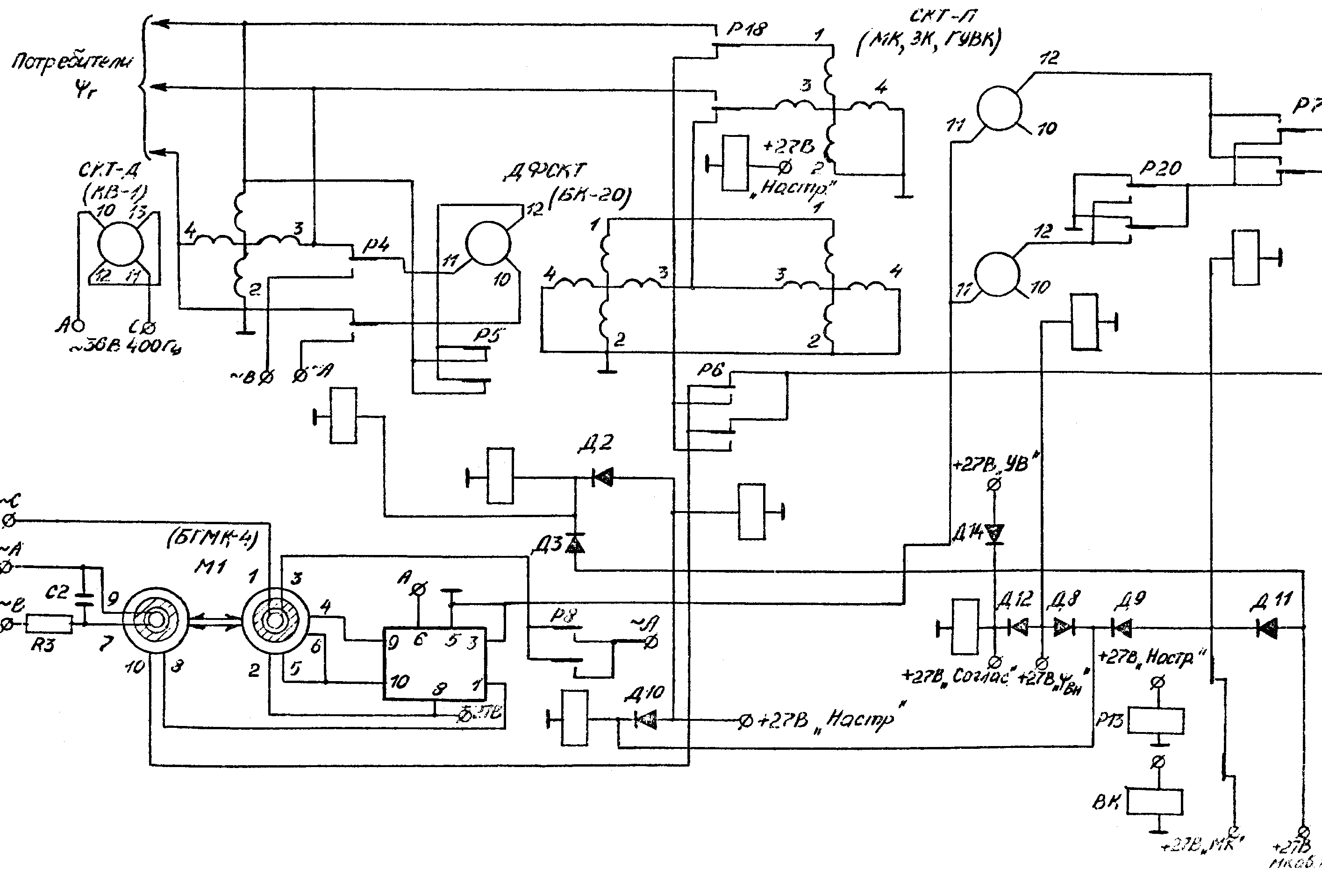
Рис. 20. Функциональная схема канала курса при настройке системы ИКВ в режиме коррекции.
Обнуление блока БГМК-4 осуществляется следующим образом (рис. 20)
Напряжение 27 В в режиме "Настройка" поступает на обмотки реле Р4, Р5, Р6, Р8 БК-20. Реле Р4 отключает косинусную обмотку ДФСКТ от обмотки статора СКТ-датчика курса КВ-1 и подает на нее напряжение 36 В, 400 Гц. Реле Р5 отключает синусную обмотку ротора ДФСКТ от статора СКТ-Д КВ-1. Реле Р8 подает напряжение 36 В, 400 Гц на двигатель М1 блока БГМК-4.
5.5.9. Окончание режима ускоренного выхода гироплатформы в горизонт и в азимуте при автоматической настройке системы ИКВ определяется моментом вхождения в синхронизм гиромоторов курсовертикали КВ-1.
Устройство для определения момента вхождения в синхронизм гиромоторов (рис. 21) состоит из конденсаторов С7 - С12, включенных параллельно фазам гиромоторов и образующих резонансные контуры токового трансформатора Тр1 и делителя напряжений R7 - R10, установленных в КВ-1, а также блока контроля БК-36, размещенного в БУГ-14.
При вхождении в синхронизм ток, потребляемый гиромоторами, а, следовательно, и напряжение, снимаемое со вторичной обмотки токового трансформатора, уменьшается в 1,5-2 раза. Сопротивление R10 подбирается так, что при вхождении гиромоторов в синхронизм падение напряжения на нем снижается до 4,5 В. Это напряжение подается на вход блока контроля БК-36, с выхода БК-36 напряжение 27 В подается на обмотку реле Р19, которое, срабатывая, снимает сигнал "27 В УВ", обеспечивающий нахождение системы ИКВ в режиме "УВ", и подает в систему ИКВ сигнал "+27 В ТВ" для переключения системы ИКВ в режим "ТВ".
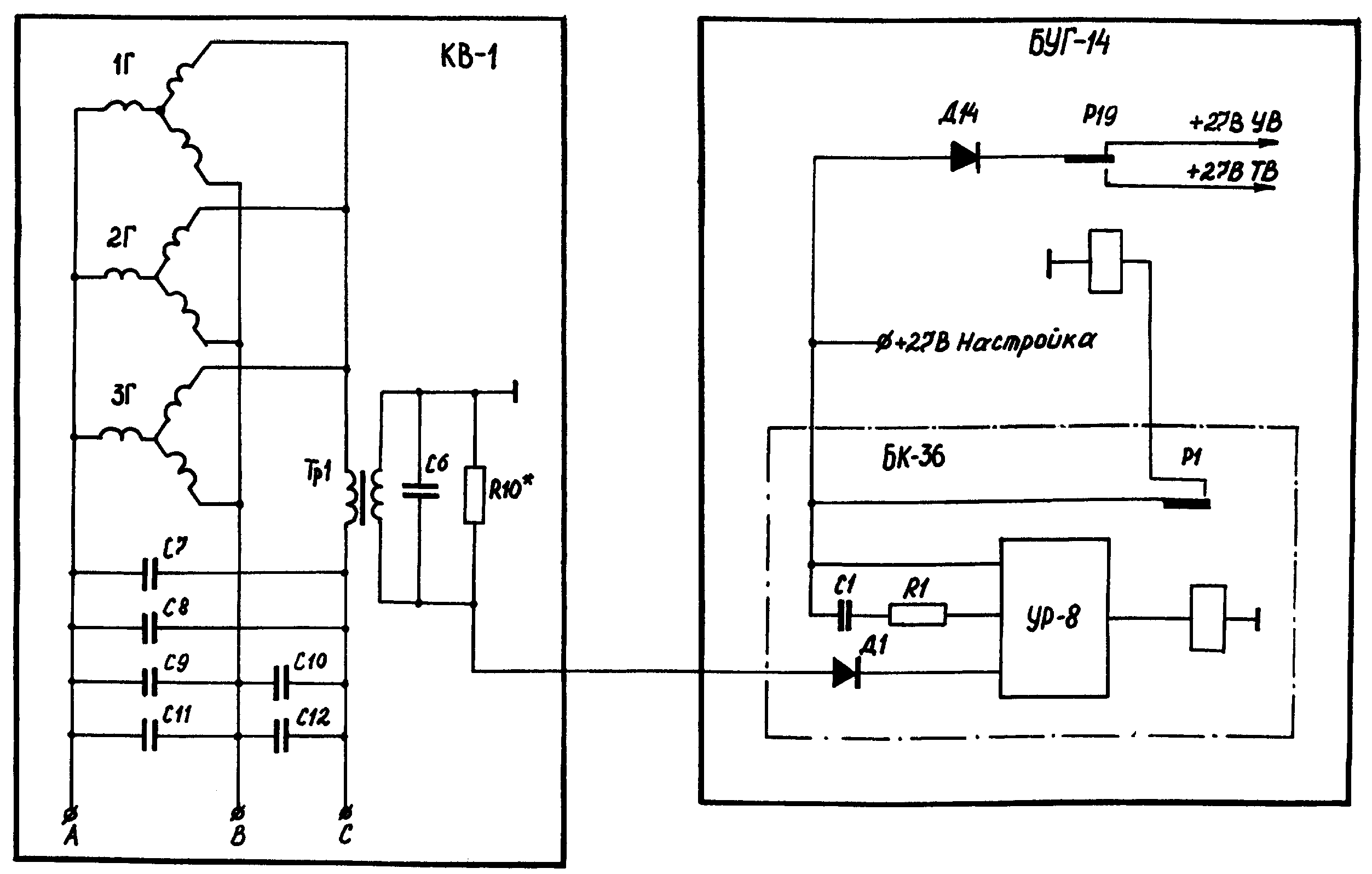
Рис. 21. Функциональная схема устройства для определения момента вхождения гиромоторов в синхронизм.
С момента подачи в систему ИКВ напряжений питания до срабатывания БК-36 напряжение 27 В с переключателя "Настр.-рабоч." пульта ПНД-1 при положении "Настр." для включения системы ИКВ в режим "УВ" поступает в систему ИКВ через диод Д14 и размыкающие контакты реле Р19.
5.5.10. Второй этап настройки, режим "ТВ" предусмотрен для точной выставки гироплатформы с датчиками акселерометров в плоскость горизонта и в азимуте, а также для запоминания постоянных составляющих дрейфа гироплатформы по каждой из ее осей.
Упрощенные функциональные схемы каналов тангажа (крена) и курса в режиме "ТВ" представлены на рис. 22, 23.
В этом режиме сигнал ао (ао) абсолютного ускорения с акселерометра (рис. 21, 23) поступает через усилитель 1УДМ (2УДМ) на датчик момента соответствующего гироскопа 1Г (2Г).
Для устранения статической ошибки на входе 1УА (2УА) сигнал с выхода 1УА (2УА) поступает на вход интегратора, который интегрирует сигнал с акселерометра; на 1УДМ (2УДМ) в этом случае поступает сума сигналов: сигнал с выхода усилителя акселерометра и сигнал с выходного потенциометра R4 интегратора.
По окончании переходного процесса сигнал на выходе усилителя акселерометра близок к нулевому и измерительная ось акселерометра находится в плоскости горизонта.

Рис. 22. Упрощённая функциональная схема канала тангажа (крена) в режиме «ТВ».
На выходных потенциометрах интеграторов "запомнился" суммарный сигнал составляющей угловой скорости вращения Земли и постоянной составляющей дрейфа гироплатформы по соответствующей оси; датчик момента развивает момент для точного удержания гироплатформы с датчиками акселерометров в плоскости горизонта. В канале курса (рис. 24) на вход усилителя коррекции поступает сигнал рассогласования СКТ-датчика курса КВ-1 и СКТ-приемника КМ. В отличие от канала тангажа (крена) на вход 3УДМ подается напряжение, пропорциональное вертикальной составляющей угловой скорости вращения Земли из пульта ПНД-1. По окончании переходного процесса на выходных потенциометрах интегратора "запомнится" только постоянная составляющая дрейфа гироплатформы по вертикальной оси; датчик момента развивает момент для точного удержания оси О гироплатформы по заданному направлению, для чего переключатель "ЗК-ГПК-МК" на ПНД-1 должен находиться в положении "ЗК".
5.5.11. В режиме "ТВ" в каналах тангажа (крена) (рис. 24) напряжение 27 В ("+27 В ТВ") подается на обмотки реле Р15 (Р16), Р17 БУГ-14.
Сигнал с датчика акселерометра 1А (2А), усиленный предварительным усилителем БУ-17 КВ-1, затем 1УА (2УА) БУГ-14, через размыкающие контакты реле Р4, замыкающие контакты реле Р8, размыкающие контакты реле Р7 БК-20 серия 1 поступает на вход интегратора.
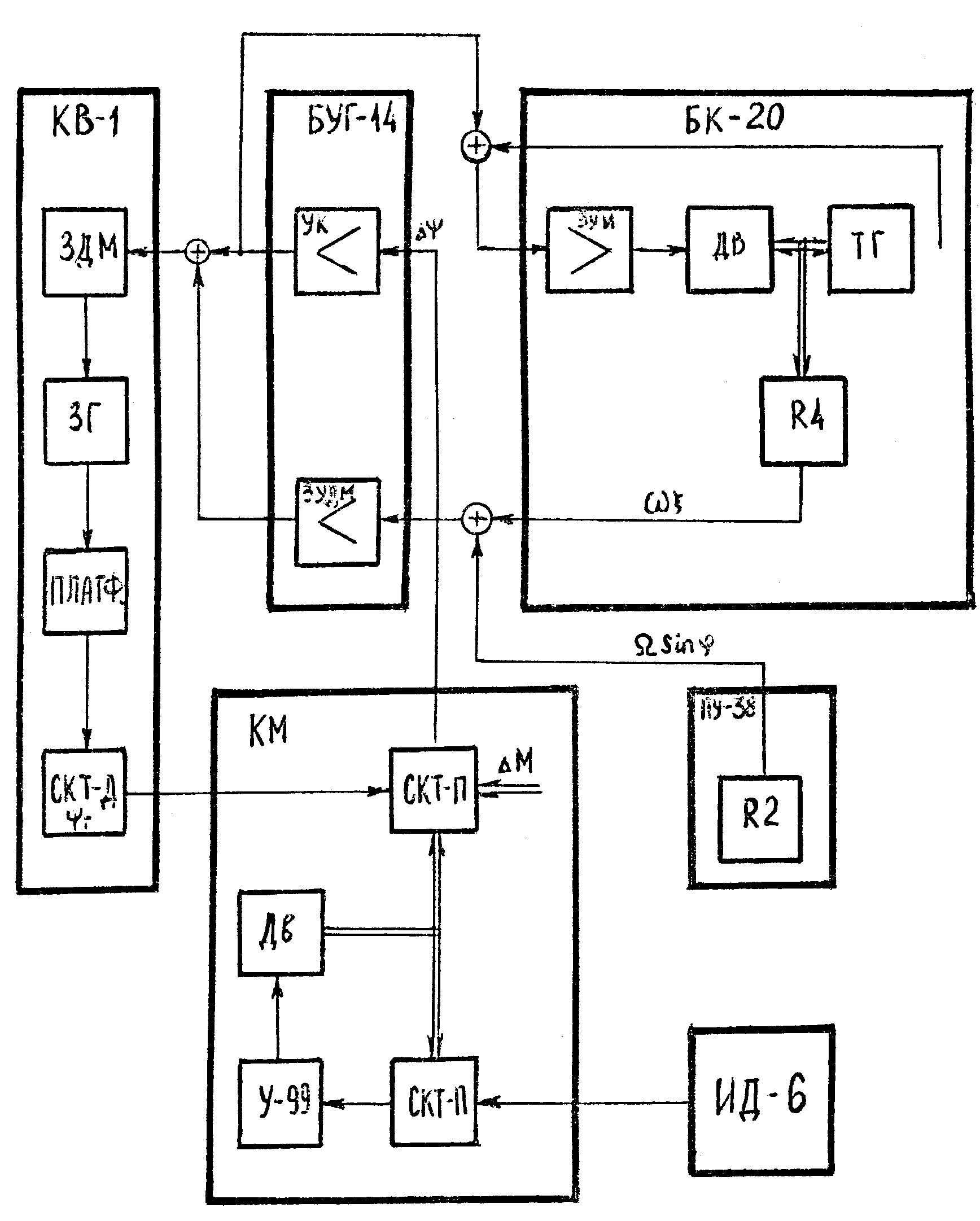
Рис. 23. Упрощённая функциональная схема канала курса в режиме «ТВ».
Напряжение с выходного потенциометра R6 блока 1БИ (2БИ) суммируется с выходным сигналом 1УА (2УА) и поступает на вход усилителя датчика моментов 1УДМ (2УДМ).
Внешняя рама крена в режиме "ТВ" работает в режиме слежения за внутренней рамой крена.
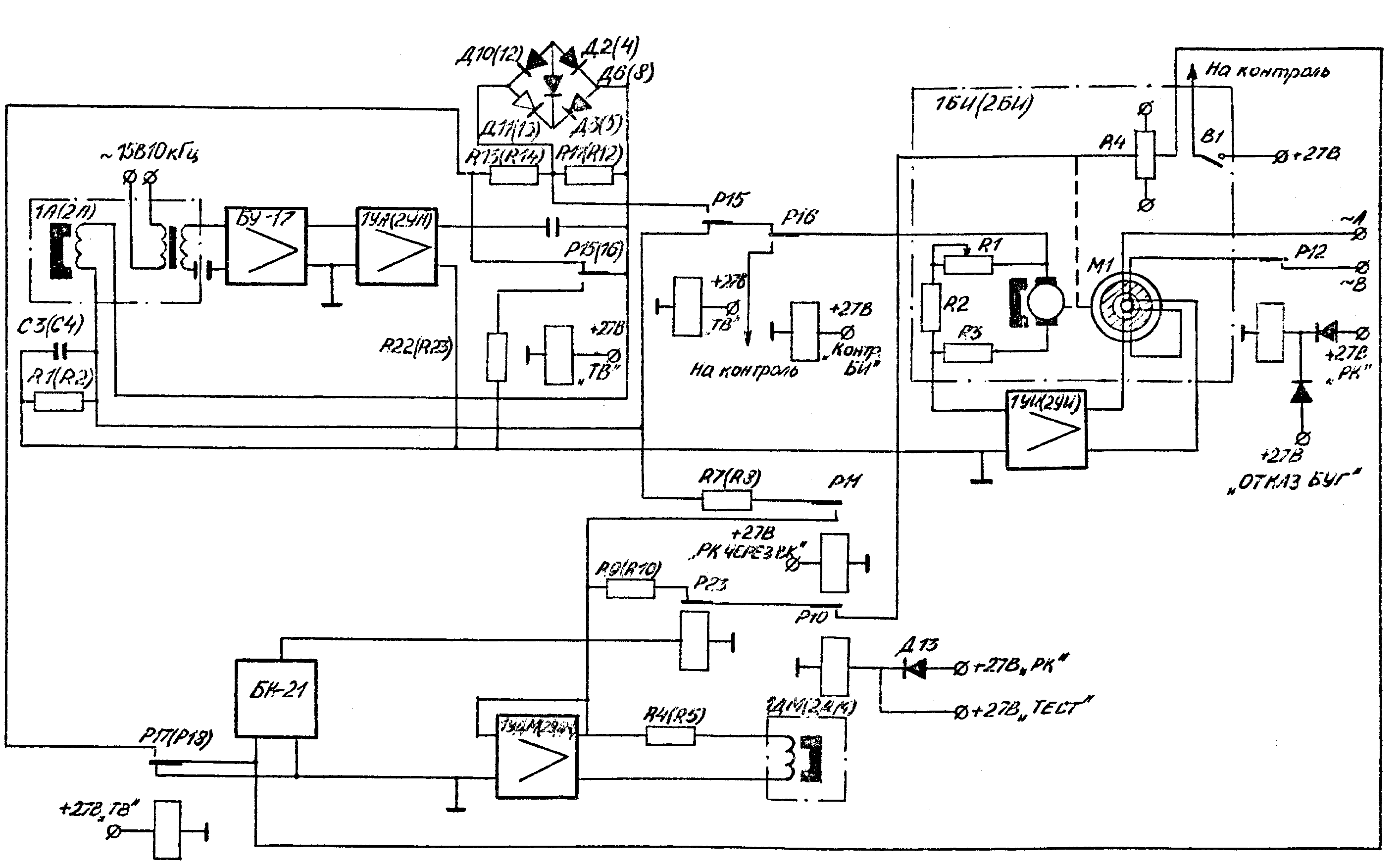
Рис. 24. Функциональная схема канала тангажа (крена) в режиме «ТВ».
В режиме "ТВ" на выход усилителя акселерометра 1УА (2УА) последовательно с масштабным сопротивлением R1 (R2) включаются сопротивления R11 (R12) и R13 (R14).
Включение сопротивления R13 (R14) приводит к увеличению крутизны сигнала акселерометра по напряжению для уменьшения времени переходного процесса в режиме "ТВ". При работе системы ИКВ в режиме "ТВ" при воздействиях, в результате которых возможны удары маятника по упорам, что может привести к отказу датчика акселерометра, параллельно сопротивлениям R11 (R12) и R13 (R14) включаются диодные мосты, состоящие из диодов Д2 (Д4), ДЗ (Д5), Д10 (Д12), Д11 (Д13), в диагональ которых включены стабилитроны Д6 (Д8).
При достижении напряжения на выходе 1УА (2УА) максимального значения стабилитроны пробиваются, и акселерометр переходит в режим работы с нормальной рабочей крутизной характеристики. Емкость C7 (С8) предназначена для обеспечения устойчивой работы акселерометра при изменении крутизны характеристики по напряжению. Резистор R22 (R23) предназначен для повышения крутизны характеристики по напряжению акселерометра в режиме "ТВ".
5.5.12. В режиме "ТВ" напряжение 27 В ("+27 В ТВ") подается в канале курса (рис. 25) на обмотки реле Р13, Р14 БУГ-14 и через замыкающие контакты реле Р12 на обмотку реле Р11 БК-20.
Сигнал с синусной обмотки ротора СКТ-приемника задатчика курса через размыкающие контакты реле Р23, Р24 поступает на вход реле Р13 БУГ-14, который, срабатывая, подает его на вход усилителя УК БУГ-14.
Напряжение с выхода УК через размыкающие контакты реле Р27 БК-20 поступает на вход усилителя интегратора 3УИ.
Напряжение с выходного потенциометра R4 интегратора БК-20 суммируется с напряжением с потенциометра R2 пульта управления ПНД-1 и через размыкающие контакты реле Р14 БУГ-14 поступает на вход усилителя 3УДМ. Датчик момента заставляет прецессировать гироплатформу в азимуте до положения, при котором сигнал с роторных обмоток СКТ-приемника будет минимальным.
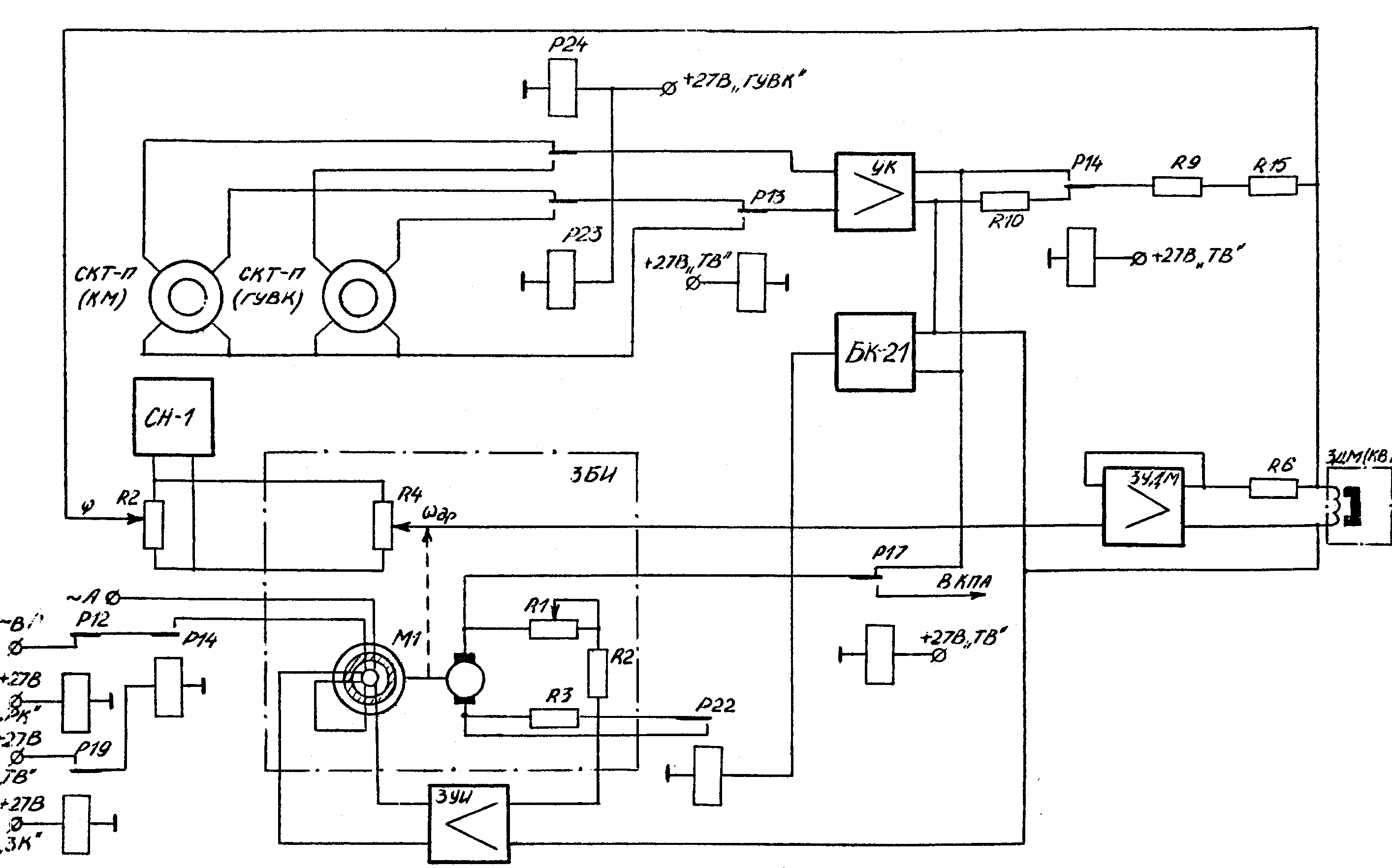
Рис. 25. Функциональная схема канала курса в режиме «ТВ».
5.5.13. Основным режимом работы ИКВ является режим интегральной коррекции. В этом режиме система ИКВ может работать при автоматической настройке с временем готовности 15 и 5 минут, в последнем случае система ИКВ работает с большими погрешностями. Автоматическая настройка системы ИКВ в режиме интегральной коррекции при времени готовности 5 минут может быть проведена, если между включениями самолет не перемещается, и начальная выставка гироплатформы проводилась одинаково.
Режим радиальной коррекции служит вспомогательным режимом и применяется в случае, когда от системы ИКВ не требуется информации о составляющих абсолютной линейной скорости, а также при немедленном вылете самолета с временем готовности 5 минут без ограничений, которые имеют место при 5-ти минутной подготовке для режима интегральной коррекции. Кроме того, режим РК применяется в случае обнаружения летчиком больших ошибок ИКВ в определении углов тангажа и крена в полете при работе в режиме интегральной коррекции.
Для работы системы ИКВ в режиме интегральной коррекции при времени готовности 5 минут или в режиме радиальной коррекции, переключатель "РК ИКВ", установленный на самолете, перед включением в систему ИКВ напряжения питания должен быть установлен в положение "РК ИКВ".
При этом 1 этап настройки системы, режим "УВ" не отличается от описанного в п.п. 5.5.2. - 5.5.8; 2 этап настройки - режим "ТВ" отличается от описанного в п.п. 5.5.10 - 5.5.12 следующим. Напряжение 27 В постоянного тока через переключатель "РК ИКВ" в канале тангажа (крена) подается на обмотки реле Р10, Р11, Р12 БК-20 (рис. 21, 23); при этом на вход 1УДМ (2УДМ) не поступает напряжение с выходного потенциометра интегратора и снимается напряжение 36 В 400 Гц с обмотки возбуждения двигателя интегратора. В канале курса (рис. 22, 24) напряжение 27 В "РК" подается на обмотку реле Р12 БК-20, которое снимает напряжение 36 В 400 Гц с обмотки возбуждения двигателя-генератора.
5.5.14. При переключении системы ИКВ в рабочий режим (переключатель "Настр. - рабоч." на ПНД-1 ставится в положение "Рабоч. ") все реле, обеспечивающие работу системы ИКВ в режиме "Настройка", обесточиваются.
При переключении системы ИКВ в рабочий режим для работы каналов тангажа и крена в режиме радиальной коррекции обмотки реле Р10, Р11, Р12 БК-20 (рис. 21, 23) остаются под напряжением.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ.
Ознакомиться с принципом построения инерциальной курсовертикали.
Изучить конструкцию центрального прибора и его принципиальную электрическую схему.
Ознакомиться с работой прибора на качающемся стенде (по заданию преподавателя).
Проанализировать по заданию преподавателя различные режимы работы системы:
1) в процессе ускоренной выставки,
2) на ускоренно движущемся основании,
3) при движении основания вокруг центра масс.
5. Составить структурную схему трехосной системы (ИКВ) с учетом перекрестных связей между парциальными системами, привести передаточные функции элементов схемы.
ЛИТЕРАТУРА
1. Репников А.В. и Черноморский А.И. Учебное пособие по курсу
Гироскопические системы, Элементы динамического синтеза. МАИ, 1977 г.
2. Пельпор Д.С. Гироскопические системы, т.1,М., Высшая школа, 1971 г.