

Начальная выставка
Особенностью алгоритмов определения параметров ориентации и навигации, построенных на использовании показаний инерциальных датчиков, является необходимость ввода начальных значений углов ориентации, проекций линейных скоростей и координат. Скорость и координаты могут быть получены, например, с приёмника ГНСС. Углы ориентации определяются в процессе начальной выставки [6]. Важно отметить, что, в большинстве случаев, начальная выставка осуществляется по углам крена и тангажа, ввиду большой погрешности определения курса. В ПАО МКНС начальная выставка обеспечивает определение углов крена и тангажа, а угол курса может быть получен от магнитометра или приёмника ГНСС.
В этой работе рассматривается два метода осуществления начальной выставки: метод векторного согласования и использование алгоритма гировертиакли.
Сущность метода векторного согласования состоит в том, что взаимная ориентация двух координатных базисов всегда может быть определена, если в осях этих базисов определены две естественно существующие или искусственно созданные неколлинеарные векторные величины.
При решении задачи начальной выставки методом векторного согласования используются два векторных параметра, измеряемых ИИМ – вектор абсолютной угловой скорости вращения объекта и вектор его кажущегося ускорения.
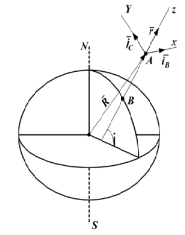
Рисунок 5 – Направление векторов для алгоритма начальной выставки
Пусть
в качестве базового трехгранника
используется стартовая система координат
осей, положение которой показано
на рисунке 5 географическим базисом
![]() .
Взаимное положение навигационного
трехгранника этого базиса и базиса
.
Взаимное положение навигационного
трехгранника этого базиса и базиса ![]() ,
связанного с объектом, определяется
матрицей направляющих косинусов [С]
(6):
,
связанного с объектом, определяется
матрицей направляющих косинусов [С]
(6):
-
(6)
Алгоритм
вычисления этой матрицы можно построить
на основе измерений двух векторных
параметров – вектор абсолютной угловой
скорости вращения объекта, равного
угловой скорости вращения Земли 𝑢,
и вектор ускорения свободного падения
𝑔.
Составляющие этих векторов в осях
стартового трехгранника
известны
априори, а в осях базиса
![]() они
могут быть непосредственно измерены
БИНС.
они
могут быть непосредственно измерены
БИНС.
В
Дополнительно следует ввести вектор
𝜈̅,
ортогональный векторам ![]() и
и
![]() (7):
(7):
𝜈̅ = × |
(7) |
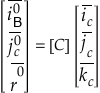
Связь между проекциями этих векторов на оси базисов можно представить в виде:
[ |
(8) |
где 𝐶0 – начальное значение матрицы направляющих косинусов [С].
Из соотношения (8) следует:
[𝐶0]
= [ |
(9) |
где
![]() – вектор
проекций ускорение
свободного падения Земли;
– вектор
проекций ускорение
свободного падения Земли;
– вектор проекций угловых скоростей Земли;
– показания акселерометров;
– показания ДУС;
Матрица направляющих косинусов [C0], соответствует начальному положению ИИМ в пространстве. Эта матрица поступает на вход алгоритма БИНС при переходе ПАО МКНС от режима «Начальная выставка» к режиму «Навигация».
Ограничением этого алгоритма является требование сохранения неподвижного положения объекта на всем протяжении выполнения начальной выставки.
Начальная выставка с применением алгоритма гировертикали основывается на том, что показания гировертикали сходятся к истинным значениям крена и тангажа при неподвижном положении объекта. Алгоритм гировертикали запускается с нулевыми начальными значениями углов курса, крена и тангажа. Далее, на протяжении заданного времени, выполняется алгоритм гировертикали, описанный в первом промежуточном отчете [1]. Так как алгоритм гировертикали не вычисляет курс, в алгоритм вводятся показания магнитометра или курс, полученный по показаниям приёмника ГНСС.
В таблице 2 приведены входные и выходные данные алгоритма начальной выставки.
Таблица 2 – Входные и выходные параметры алгоритма начальной выставки
№ |
Входные параметры |
Выходные параметры |
|
|
Показания ДУС |
Матрица направляющих косинусов [C] размерности (3,3) |
|
|
Показания акселерометров |
|
|
|
Широта,
высота |
Для рассмотренных методов, входная и выходная информация совпадает.
Начальная
выставка методом векторного согласования
наиболее распространена в высокоточных
системах, так как ошибки датчиков
навигационного класса имеют значительно
меньшие величины по сравнению с
измеряемыми векторами силы тяжести и
угловой скорости вращения Земли. Точность
автономной выставки также зависит от
широты места, в котором осуществляется
выставка. Наибольшую точность метод
векторного согласования имеет при
нулевой широте (на экваторе) и не применим
при широте
![]() (на
полюсах). Метод начальной выставки,
построенный на алгоритме гировертикали
менее точен, но более устойчив к
погрешностям инерциальных датчиков,
что особенно важно для МЭМС.
(на
полюсах). Метод начальной выставки,
построенный на алгоритме гировертикали
менее точен, но более устойчив к
погрешностям инерциальных датчиков,
что особенно важно для МЭМС.