

Создание систем реального времени на базе ПЛК
Принцип работы плк
Упрощенная схема работы плк
ПЛК (программируемый логический контроллер) представляют собой микропроцессорное устройство, предназначенное для сбора, преобразования, обработки, хранения информации и выработки команд управления. На входы ПЛК подключены датчики, контакты кнопок и реле, а на выходы подключены исполнительные механизмы (рис. 2.1).
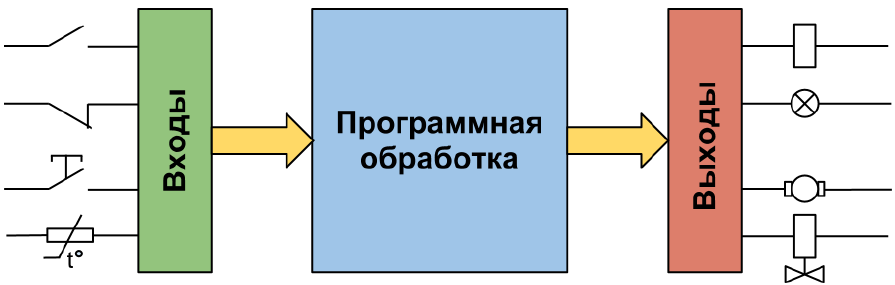
Рис. 1.1. Упрощенная схема работы ПЛК
Программное обеспечение универсальных контроллеров состоит из двух частей: системное программное обеспечении и пользовательская программа. Системное программное обеспечение – проводя аналогию с компьютером можно сказать, что это операционная система, т.е. управляет работой узлов контроллера, отвечает за организацию связи по сети.
Цикл контроллера
Системное программное обеспечение ПЛК расположено в постоянной памяти центрального процессора. По включению питания ПЛК выполняет самотестирование и настройку аппаратных ресурсов.
Далее, если прикладная программа обнаружена в памяти, то ПЛК переходит к основной работе, которая состоит из постоянного повторения последовательности действий, входящих в цикл контроллера (рис. 2.2).
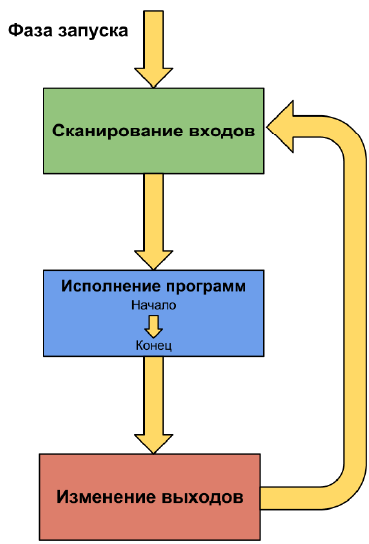
Рис. 1.2. Цикл контроллера
Как видно, рабочий цикл ПЛК включает 3 фазы:
ПЛК производит физическое чтение входов. Прочитанные значения размещаются в оперативной памяти контроллера в области памяти входов. Таким образом, создается полная одномоментная копия значений входов.
Выполняется код пользовательской программы. Пользовательская программа работает с копиями значений входов и выходов, размещенными в оперативной памяти.
Устанавливаются физические выходы ПЛК в соответствие с расчетными значениями. Именно в этот момент происходят переключения/изменения положения исполнительных механизмов.
Таким образом, значения входов в процессе выполнения пользовательской программы не изменяются в пределах одного рабочего цикла. Это фундаментальный принцип построения ПЛК сканирующего типа. Такой подход исключает неоднозначность алгоритма обработки данных в различных его ветвях. Кроме того, чтение копии значения входа из ОЗУ выполняется значительно быстрее, чем прямое чтение физического входа.
За счет этого обеспечивается максимальная простота построения прикладной программы – ее создатель не должен знать, как производится управление аппаратными ресурсами. Необходимо знать с какого входа приходит сигнал и как на него реагировать на выходах.
Время реакции на событие
Очевидно, что время реакции на событие будет зависеть от времени выполнения одного цикла прикладной программы. Определение времени реакции (сканирования) – времени от момента события до момента выдачи соответствующего управляющего сигнала – поясняется на рисунке 2.3:
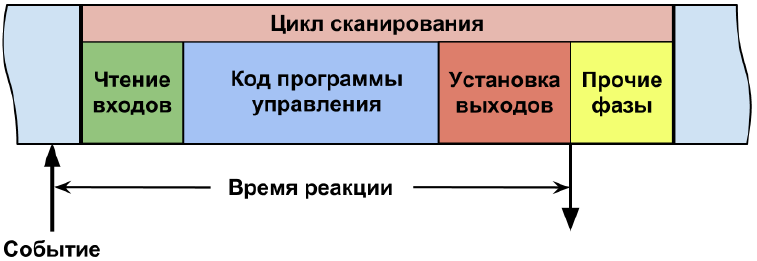
Рис. 1.3. Время реакции на событие
Для уменьшения времени реакции в контроллерах используется использование циклических и аппаратных прерываний. Кроме этого, также применяются обработчики прерываний для инициализации системы при первом запуске, для диагностирования и т.п. Время цикла сканирования является базовым показателем быстродействия PLC.
В современных контроллеров цикл контроллера не превышает более 10 мс.
Контроль времени рабочего цикла. Правильно составленная пользовательская программа не должна содержать бесконечных циклов. В противном случае управление системе исполнения не будет передано, и, соответственно, нормальное функционирование контроллера будет нарушено. Для преодоления данной проблемы служит контроль времени цикла.
Контроль осуществляется при поддержке аппаратно реализованного «сторожевого таймера». Если фаза пользовательского кода выполняется дольше установленного порога, то ее работа будет прервана и цикл работы контроллера принудительно начнется заново. Таким образом, достигается предсказуемое поведение ПЛК при ошибках в программе и при «зависании» по причине аппаратных сбоев.