

Выбранные компоненты для реализации системы
Для
реализации цифрового регулятора
положения хорошо подходят программируемые
логические интегральные схемы (ПЛИС)
семейства Spartan
3 фирмы Xilinx,
например, микросхема XC3S50-PQ208I
[7]. Данная микросхема содержит 50К
логических вентилей, 72 Кбит встроенной
памяти и позволяет программировать до
124 контакта ввода вывода, что вполне
достаточно для реализации дискретного
регулятора положения. Диапазон рабочих
температур от
![]() до
до
![]() .
.
Задающий
сигнал может подаваться в регулятор
положения либо в непосредственном
цифровом виде, либо посредством задающего
вала с цифровым датчиком положения.
Такой же датчик положения устанавливается
на исполнительный вал. В качестве
датчика углового положения может
использоваться опто-электронный
абсолютный ДУП с синхронно-последовательным
интерфейсом (SSI)
- OCD
SL
8-05 фирмы Fraba
Posital
Gmbh
[8]. Так как датчик положения – цифровой,
то примем его коэффициент передачи
![]() В/рад.
В/рад.
В
качестве датчика скорости будем
использовать тахогенератор D-41
A
фирмы Rollvam
[9]. Этот тахогенератор согласно паспортным
данным имеет коэффициент передачи
![]() .
.
В
качестве исполнительного двигателя
выберем двигатель MSS-45
фирмы Mavilor
[10]. Паспортные данные: номинальная
мощность на валу
![]() ,
номинальная частота вращения
,
номинальная частота вращения
![]() ,
источник питания 220 В/50 Гц, номинальный
ток якоря
,
источник питания 220 В/50 Гц, номинальный
ток якоря
![]() ,
сопротивление обмоток якоря
,
сопротивление обмоток якоря
![]() ,
индуктивность якоря
,
индуктивность якоря
![]() ,
номинальный момент
,
номинальный момент
![]() ,
коэффициент момента
,
коэффициент момента
![]() ,
коэффициент противо-ЭДС
,
коэффициент противо-ЭДС
![]() ,
коэффициент демпфирования
,
коэффициент демпфирования
![]() ,
механическая постоянная времени
,
механическая постоянная времени
![]() ,
постоянная якорной цепи
,
постоянная якорной цепи
![]() .
.
Управление двигателем будем осуществлять с помощью реверсивного тиристорного преобразователя ТЕР4-63/230Н-1-2УХЛ4 фирмы Рил [11]. Этот преобразователь работает от сети 220 В/ 50 Гц, номинальный выпрямленный ток 63 А, номинальное выпрямленное напряжение 230 В.
Для подсоединения нагрузки к валу двигателя используется редуктор, выбор которого зависит от требуемого момента на выходе и скорости. В данном случае будем использовать планетарный редуктор TP-110 фирмы alpha [12]. Этот редуктор позволяет настроить передаточное отношение i из ряда 5,7,10,21,31,61,91. Выберем i=91.
Регуляторы для внутренних контуров скорости и тока будем реализовывать на основе стандартных аналоговых компонентов (усилители постоянного тока, резистивные элементы, дроссели, конденсаторы и т.п.), которые широко представлены на рынке.
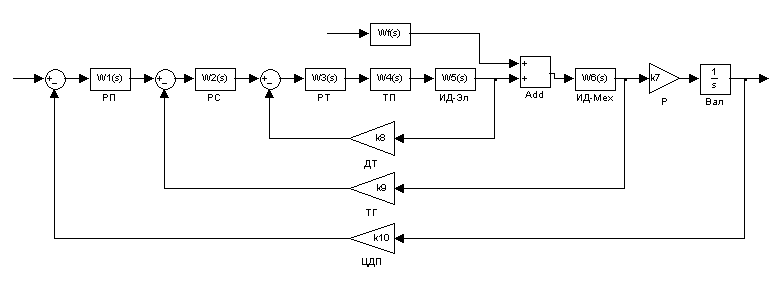
Составление расчетной структурной схемы
Функциональная схема СС (рисунок 1) может быть представлена в виде следующей расчетной структурной схемы:
Mc
![]()
![]()
![]()
![]()
Рисунок 2. Расчетная структурная схема СС
Таблица 2. Передаточные функции элементов СС
Элемент СС |
Передаточная функция |
Параметры |
Тиристорный преобразователь (ТП) |
|
|
Цепь якоря исполнительного двигателя (ИД-Эл) |
|
|
Механическая часть ИД (ИД-Мех) |
|
|
Редуктор (Р) |
|
|
Датчик тока (ДТ) |
|
|
Тахогенератор (ТГ) |
|
|
Цифровой датчик положения (ЦДП) |
|
|
Элемент, учитывающий влияние изменения момента на валу ИД |
|
|


Примечание.
Строго говоря, тиристорный преобразователь
нельзя рассматривать как пропорциональное
звено с передаточной функцией
![]() .
ТП по принципу совей работы является
дискретным элементом. Воздействие на
управляемый преобразователь осуществляется
импульсно, подачей отпирающего импульса
на управляющий электрод тиристора.
После включения очередного тиристора
воздействие на преобразователь возможно
только спустя некоторое время, когда
СИФУ подает импульс на отпирание
очередного тиристора. Поэтому ТП следует
рассматривать как динамическое звено
с запаздыванием или приближенно как
апериодическое звено с постоянной
времени
.
ТП по принципу совей работы является
дискретным элементом. Воздействие на
управляемый преобразователь осуществляется
импульсно, подачей отпирающего импульса
на управляющий электрод тиристора.
После включения очередного тиристора
воздействие на преобразователь возможно
только спустя некоторое время, когда
СИФУ подает импульс на отпирание
очередного тиристора. Поэтому ТП следует
рассматривать как динамическое звено
с запаздыванием или приближенно как
апериодическое звено с постоянной
времени
![]() равной средней величине запаздывания.
равной средней величине запаздывания.
Коэффициент
передачи датчика тока (ДТ) выбирается
исходя из максимального допустимого
напряжения
![]() на
входе регулятора тока при номинальном
токе двигателя (
на
входе регулятора тока при номинальном
токе двигателя (![]() ).
).