

9. Дискретизация выбранного непрерывного регулятора
По
полученной ранее непрерывной передаточной
функции регулятора получим дискретную
передаточную функцию регулятора. Для
этого необходимо определить период
квантования
 .
Найти верхнюю границу для этого параметра
можно из неравенства:
.
Найти верхнюю границу для этого параметра
можно из неравенства:

где
 – частота среза ЛАЧХ разомкнутой модели,
– частота среза ЛАЧХ разомкнутой модели,
 – допустимое значение погрешности
аппроксимации (примем
– допустимое значение погрешности
аппроксимации (примем
 или
или
 ).
).

Рисунок 9. ЛАЧХ разомкнутой линейной системы с выбранным регулятором.

Определение дискретной передаточной функции по известной передаточной функции регулятора возможно с помощью кода MATLAB:
Wreg = tf([20 20],[1 0])
dregulator=c2d(Wreg,1/75.3*pi))
Таким образом, дискретная передаточная функция имеет вид:
dregulator =
20 z - 19.92
------------
z – 1
Чтобы была возможность выставлять начальные условия, представим полученный регулятор в форме пространств состояний, используя следующие команды:
>> [Ad,Bd,Cd,Dd]=ssdata(dregulator);
>> ddregulator=ss(Ad,Bd,Cd,Dd, (1/75.3*pi))
Полученные матрицы A, B, C, D дискретизированного непрерывного регулятора:
A =
x1
x1 1
B =
u1
x1 0.25
C =
x1
y1 0.3382
D =
u1
y1 20
Импортируем из рабочего пространства MATLAB, полученный регулятор в Simulink модель, с помощью блока LTI System для дальнейшего сравнения.
10. Сравнение характеристик системы при дискретном регуляторе и непрерывном регуляторе, синтезированном «в большом».
Произведем сравнительный анализ поведения системы аналогично п. 10 при использовании различных регуляторов.
10.1 При переходе с номинального режима на заданный.
Рассмотрим поведение системы при переходе с номинального на заданный режим. На рисунках 11.1.1. – 11.1.4. представлены соответствующие графики.
Для сравнения показателей качества сведем их в таблицу, представленную ниже (таблица 5).

Рисунок 10.1.1. Переход системы с номинального режима на заданный при непрерывном и дискретном регуляторах. Сигнал , выход системы.
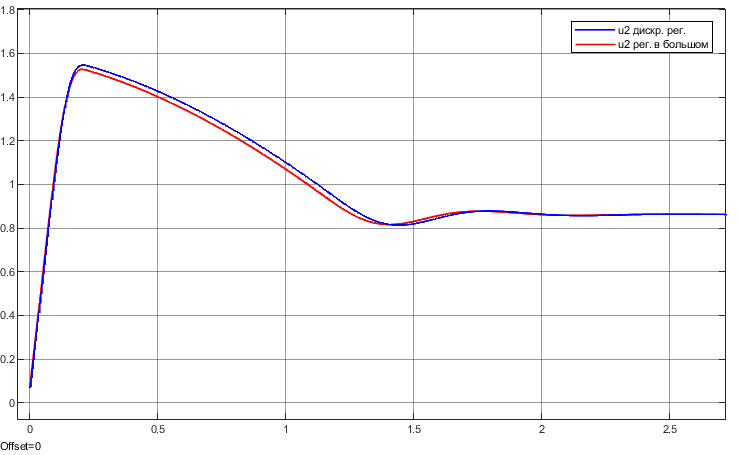
Рисунок 10.1.2. Переход системы с номинального режима на заданный при непрерывном и дискретном регуляторах. Сигнал , выход регулятора.

Рисунок 10.1.3. Переход системы с номинального режима на заданный при непрерывном и дискретном регуляторах. Сигнал , выход преобразователя.

Рисунок 10.1.4. Переход системы с номинального режима на заданный при непрерывном и дискретном регуляторах. Сигнал , выход исполнительного механизма.
Таблица 5
-
Регулятор
«в большом»
Дискретный
6.5
6.6
1.141
1.153
Как можно видеть по таблице 5, регуляторы обеспечивают почти одинаковое качество процессов, но дискретный регулятор немного «отстает» от непрерывного в выдаче управляющего воздействия, что неизбежно при дискретизации.