

3.2. Синтез наблюдателя состояний
Регулятор состояния формирует управляющие воздействия на основе текущей информации о все переменные состояния.
Пусть реально измеряется только положение каретки х. Для вычисления остальных переменных состояния используют так называемый наблюдатель состояния. Задача синтеза наблюдателя сводится к поиску матрицы наблюдателя L.
Задача имеет решение, если объект наблюдаем полностью по выходу х. Наблюдаемость состояния можно проверить по критерию Калмана, который сводится к проверке ранга матрицы наблюдаемости.
Матрица наблюдаемости имеет полный ранг, следовательно, состояние объекта наблюдаемо полностью.
Задачи синтеза регулятора и наблюдателя состояний дуальны. Наблюдатель также синтезируется методом размещения собственных значений.
Для обеспечения большего быстродействия назначим собственные значения наблюдателя несколько дальше от мнимой оси в левой полуплоскости:

3.3. Динамический регулятор
Динамический регулятор получим, если объединить регулятор и наблюдатель состояния.
Уравнения динамического регулятора имеют вид:
 ;
;
 ,
,
где матрицы вычисляются по команде:


Отрицательный коэффициент знаменателя ПФ — ХП динамического регулятора означает неустойчивость регулятора.
Для анализа устойчивости линейной системы получим матрицы системы уравнений замкнутой системы:

Замкнутая линейная система с динамическим регулятором устойчива и имеет желаемые собственные значения системы и наблюдателя.
Таким образом, неустойчивый объект и неустойчивый регулятор образуют устойчивую систему с отрицательной обратной связью.
3.3. Оценка области притяжения положения равновесия
Устойчивость линейной модели означает устойчивость «в малом» положения равновесия нелинейной системы (первый метод Ляпунова). Другими словами, существует область притяжения положения равновесия.
Подключим динамический регулятор к нелинейному объекту (рис. 3.1).

Рис 3.1. Система «нелинейный объект + динамический регулятор»
Для нелинейной системы (см. рис. 3.1) проведем проверку выполнения условия устойчивости «в малом». Линеаризуем замкнутую систему и вычислим собственные значения:
Для нелинейных моделей нет расчетных методов оценки размеров области притяжения. Единственным способом приближенной оценки является многократное компьютерное моделирование при различных начальных условиях.
Для примера на рис. 3.2. приведен результат такого поиска — процессы при максимальном отклонении маятника на 0.08 радиана от положения равновесия. Линейный динамический регулятор способен стабилизировать нелинейный объект.
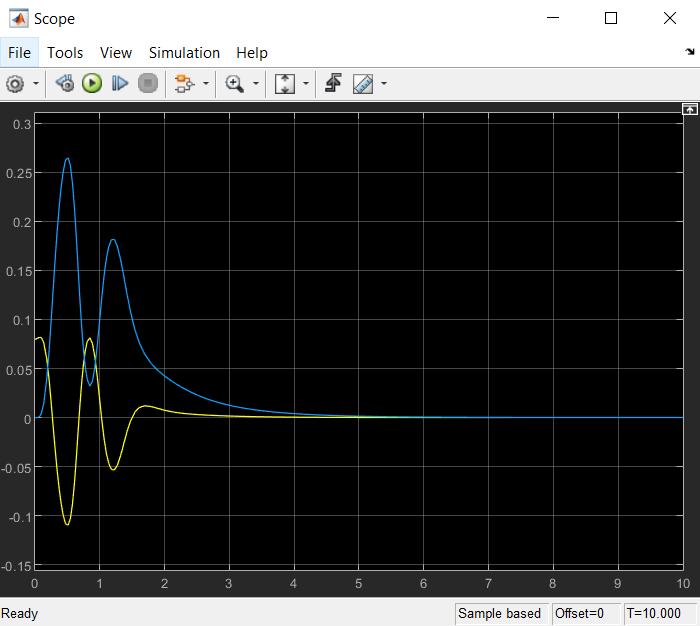
Рис. 3.2. Поведение системы при начальном отклонении маятника на 0.08 рад

Рис. 3.3. Поведение системы при начальном отклонении каретки на 0.0005м
4. Синтез системы стабилизации частотным методом
4.1. Частотный метод синтеза
Воспользуемся частотным методом синтеза системы стабилизации маятника на каретке. Метод позволяет учитывать естественным образом собственную динамику управляемого объекта.
Имеются развитые средства MATLAB/SISO Design Tool, позволяющими автоматизировать синтез и коррекцию следящих систем в частотной области. Здесь для наглядности процедуры синтеза ограничимся только основными командами MATLAB/Control System Toolbox.
Пусть дополнительно к датчику положения каретки x(t) имеется и датчик углового положения маятника θ(t).
1. Вначале найдем
обратную связь, стабилизирующую положение
маятника. Передаточная функция (ПФ)
управляемого объекта по паре вход-выход
 вырождается до второго порядка
вырождается до второго порядка
−5/(s2 – 14.2) (4.1)
Обратим внимание на знак «минус».
Вырождение ПФ означает неполную наблюдаемость объекта по этому каналу ― с помощью обратной связи от датчика углового положения маятника до привода каретки нельзя стабилизировать каретку. Частичная наблюдаемость по одному из каналов будет использовано для декомпозиции процедуры синтеза.
Известно, что обратная связь перемещает корни характеристического полинома системы в разной степени в зависимости от усиления контура на частотах, которым принадлежат модули корней. Если усиление контура менее –20 дБ, то корни, модули которых принадлежат этому диапазону частот, перемещаются мало. Полюсы ПФ объекта вообще неподвижны, если их компенсируют равные им нули, т. е. на комплексной частоте полюсов фактическое усиление контура равно нулю.
Вводим ПФ объекта (4.1) в рабочее пространство MATLAB и построим логарифмическую амплитудно-частотную характеристику (ЛАЧХ, диаграмма Боде) канала (рис. 4.1, кривая 1).


Рис. 4.1. Логарифмические амплитудно-частотные характеристики
разомкнутого контура стабилизации маятника
Асимптотическая ЛАЧХ объекта состоит из двух асимптот ― низкочастотной с наклоном 0 дБ/дек и высокочастотной с наклоном –40 дБ/дек.
Усиление объекта по рассматриваемому каналу мало на всех частотах — при замыкании контура полюсы практически останутся на месте. В контур необходимо ввести усилитель, чтобы на частотах перемещаемых полюсов усиление превышало 20 дБ. Для повышения степени подвижности неустойчивого полюса 3.6166 ПФ объекта (4.1) повысим усиление контура в 200 раз.
Усиление поднимет ЛАЧХ контура на 52 дБ (кривая 2), т. е. расширяет полосу пропускания частот контура и обеспечивает подвижность неустойчивого полюса.
Однако при замыкании контура система окажется неустойчивой (получившие подвижность корни приближаются к границе устойчивости и даже переходят в правую полуплоскость). Необходима коррекция контура.
Известно, что типовая («желаемая») асимптотическая ЛАЧХ в области средних частот имеет наклон –20 дБ/дек. Чем длиннее этот отрезок, тем больше запас устойчивости системы.
Для придания ЛАЧХ типового вида в области средних частот введем в контур корректирующее звено. ПФ звена имеет действительный нуль z1 = –20 и полюс p1 = –1000 (см. скриншот выше)
Построим ЛАЧХ контура с последовательной коррекцией
В окрестности
частоты среза
 рад/с
получился отрезок асимптоты с наклоном
–20 дБ/дек (кривая 3 на рис. 4.1). При этом
крайние частоты отрезка асимптоты
отличаются в 50 раз, что обеспечивает
достаточно большой запас устойчивости
замкнутой системы.
рад/с
получился отрезок асимптоты с наклоном
–20 дБ/дек (кривая 3 на рис. 4.1). При этом
крайние частоты отрезка асимптоты
отличаются в 50 раз, что обеспечивает
достаточно большой запас устойчивости
замкнутой системы.
Анализ замкнутой скорректированной системы

В круглых скобках добавлен -1, так как команда feedback по умолчанию выбирает отрицательную обратную связь, а объект уже инвертирует сигнал.
Также было вычислено с.з. системы.
Цель достигнута ― собственные значения подсистемы являются отрицательными действительными числами (следствие большого запаса устойчивости) и находятся далеко от границы устойчивости (как следствие высокой частоты среза система оказывается быстродействующей).
Создадим simulink-модель нелинейной системы с замкнутым контуром стабилизации маятника с именем 'mylab1' (рис. 4.2).

Рис. 4.2. Модель нелинейной системы стабилизации маятника
Проведем анализ устойчивости системы стабилизации положения маятника — преобразуем модель к форме пространства состояний
![]()

Два нулевых собственных значения остались на месте. Они принадлежат неуправляемой части объекта — состоянию каретки.
2. Второй этап синтеза ― стабилизация положения каретки (с маятником). Управляемым объектом (второго уровня) синтеза оказывается система, синтезированная на первом этапе (рис. 4.2). Ее входом, как и на первом этапе, является сила , действующая на каретку, а выходом ― положение каретки .
ПФ объекта второго уровня (скриншот выше)
ПФ не имеет одинаковых нулей и полюсов (объект является полностью управляемым и наблюдаемым).
ПФ имеет положительный нуль z2 = 3.57, т. е. является неминимально-фазовой. Это свидетельствует о том, что объект второго уровня имеет отрицательный коэффициент усиления (точнее, добротность).
Известно, что корни ХП замкнутой системы стремятся к нулям разомкнутой системы, модули которых принадлежат диапазону частот, где велико усиление контура. Наличие у ПФ правого нуля требует, чтобы на этой частоте усиление контура было малым. Следовательно, на частоте z2 ≅ 3.78 рад/с усиление желаемого контура должно быть не более –16…–20 дБ. Тогда замкнутая система не будет иметь собственных значений, близких к правому нулю ПФ объекта второго уровня.
Частотная характеристика объекта второго уровня приведена на рис. 4.3 (кривая 1).
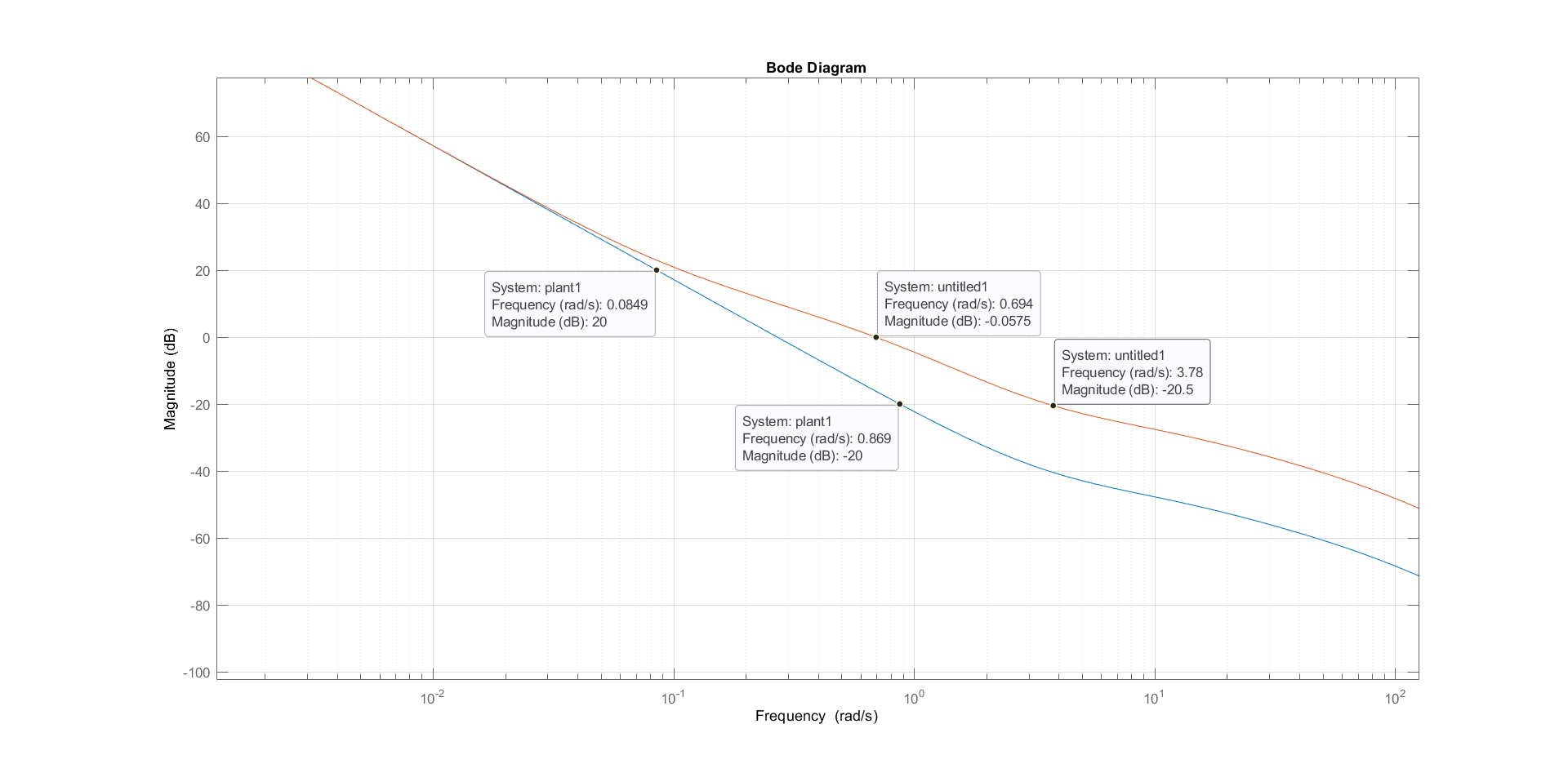
Рис. 4.3. ЛАЧХ второго этапа синтеза: объекта (1); контура после коррекции (2)
Дополнительным условием, накладываемым на желаемую ЛАЧХ контура второй подсистемы, является малое усиление на частотах корней, сформированных на первом этапе. Усиление контура должно быть менее –16…–20 дБ на частоте 3.78 рад/c.
Очевидно, достаточно контролировать только низшую из всех частот. Это требование автономности подсистем также ограничивает полосу пропускания частот контура, а соответственно и быстродействие системы стабилизации каретки.
Далее действуем аналогично процедуре синтеза первого контура. Включим активную последовательную коррекцию с ПФ.
Т. е. введем в контур
действительный нуль z3
= –0.0849 и
полюс p3
= -0.869, что дает типовую ЛАЧХ с отрезком
асимптоты с наклоном −20 дБ/дек в
окрестности частоты среза
 рад/с
(кривая 2 на рис. 4.3).
рад/с
(кривая 2 на рис. 4.3).
Создадим simulink-модель системы с замкнутым контуром стабилизации каретки (рис. 4.4). Обратим внимание на сумматоры, в которых сигналы обратных связей суммируются со знаком «+». Это следствие неминимально-фазовой ПФ объекта.
Рекомендуется дополнить модель блоками упрощенной анимации.

Рис. 4.4. Структурная схема системы стабилизации, образованная двумя регуляторами
Для анализа устойчивости системы преобразуем модель к форме пространства состояний:
![]()
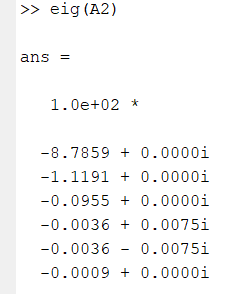
Получилась устойчивая «в малом» система шестого порядка.
Большой разброс собственных значений приводит к сильно различающимся по темпу процессам стабилизации маятника и каретки.
Ввиду относительной малости постоянных времени знаменателей ПФ можно полагать, что для стабилизации приняты ПД-регуляторы:
- маятника
200*(1/9.26+1)/(1/1000+1)
- каретки
(11.76+1)/(1.149+1)
Свойство неполной наблюдаемости маятника на каретке по выходу ― угловому положению маятника — позволило реализовать декомпозицию процедуры синтеза. Вначале синтезируется стабилизирующая обратная связь для маятника, после чего находится регулятор положения каретки. Ограничения, обеспечивающие условия приближенной автономности подсистем стабилизации маятника и каретки, естественным образом учитываются благодаря частотному подходу. Важнейшей особенностью частотного подхода является учет динамики объекта (нескорректированного контура) при выборе желаемого поведения, т. е. желаемой частотной характеристики.

Рис. 4.5. График смещения положения маятника y max = 1.3

Рис. 4.5. График смещения положения каретки x max = 29