

ИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра АПУ
Отчёт
По Курсовой РАБОТе
по дисциплине «Теория автоматического управления»
Тема: Синтез систем автоматического управления перевёрнутым маятником на каретке
Студент гр. 0391 |
|
Чащин Д. |
Преподаватель |
|
Имаев Д.Х. |
Санкт-Петербург
2023
содержание
Предисловие |
3 |
|
1. Перевёрнутый маятник на каретке как модель управления |
4 |
|
1.1. |
Перевёрнутый маятник на каретке |
4 |
1.2. |
Математическая модель объекта управления |
5 |
1.3. |
Дифференциальные уравнения в форме Коши |
6 |
2. Анализ объекта управления |
7 |
|
2.1. |
Компьютерное моделирование |
7 |
2.2. |
Линеаризация дифференциальных уравнений |
9 |
2.3. |
Передаточная функция объекта |
10 |
2.4. |
Анализ устойчивости положения равновесия |
11 |
2.5. |
Линеаризация модели и анализ в среде MATLAB/Simulink |
11 |
3. Синтез системы автоматической стабилизации методом пространства состояний |
12 |
|
3.1. |
Синтез регулятора состояния |
12 |
3.2. |
Синтез наблюдателя состояний |
17 |
3.3. |
Динамический регулятор |
18 |
3.4. |
Оценка области притяжения положения равновесия |
20 |
4. Синтез системы стабилизации частотным методом |
22 |
|
4.1. |
Частотный метод синтеза |
22 |
5. Системы с цифровыми управляющими устройствами |
30 |
|
5.1 |
Моделирование системы цифрового управления непрерывным объектом |
30 |
Предисловие
Динамические модели перевернутых маятников различной конфигурации используются в научных публикациях для сравнения методов синтеза алгоритмов автоматической стабилизации, а также в учебном процессе технических университетов в качестве наглядных примеров неустойчивых объектов.
Отмечается, что многозвенные перевернутые маятники служат примерами шагающих роботов, ракет на старте, нескольких барж, которых толкает буксир и т. д. и т. п.
Целью курсового проектирования является освоение методов моделирования, анализа и синтеза систем автоматического управления с помощью современных инструментальных средств.
Для достижения цели необходимо решить следующие задачи:
- построить нелинейную математическую модель объекта управления;
- провести анализ объекта методом компьютерной имитации;
- провести анализ устойчивости, управляемости и наблюдаемости объекта по линеаризованной модели;
- синтезировать регуляторы методом пространства состояний;
- синтезировать регуляторы частотным методом;
- провести анализ нелинейных систем управления;
- выбрать алгоритмы цифрового управления непрерывным объектом.
1. Перевёрнутый маятник на каретке как модель управления
1.1. Перевернутый маятник на каретке
Принципиальная схема механического объекта — перевернутого маятника на каретке — изображена на рис. 1.1, где приняты следующие обозначения параметров:
m – масса маятника, кг;
M – масса каретки, кг;
l – длина маятника, м,
а также переменных:
 (t)
– угол отклонения маятника, рад;
(t)
– угол отклонения маятника, рад;x(t) – положение каретки, м;
f(t) – сила, действующая на каретку, Н (кг*м/сек2).
Целью управления является стабилизация верхнего положения равновесия маятника.
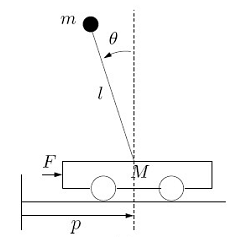
Рис. 1.1. Принципиальная схема перевернутого маятника на каретке
Рассматриваемый объект имеет две степени свободы – вращательное движение маятника и поступательное движение каретки. Управление таким объектом осложняется тем обстоятельством, что имеется только одно управляющее воздействие – сила f(t), приложенная к каретке.
1.2. Математическая модель объекта управления
Методы синтеза систем автоматического управления непрерывными объектами основаны на математических моделях в виде дифференциальных уравнений.
Рис. 1.1 можно интерпретировать как символьную модель, представленную на языке механики. Для перевода знаний с языка механики (рис. 1.1) на язык математических моделей используют законы классической механики. Такой способ построения математических моделей называют аналитическим — он возможен для объектов хорошо изученной природы.
Примем следующие допущения:
массы маятника и каретки сосредоточены;
отсутствуют сопротивление среды и трение.
В качестве обобщенных координат для рассматриваемой системы с двумя степенями свободы выберем y (t) — угол отклонения маятника и x(t) — положение каретки.
Математическая модель рассматриваемого объекта — система двух дифференциальных уравнений второго порядка
 (1.1)
(1.1)
 (1.2)
(1.2)
Уравнение (1.2) представляет собой выражения баланса моментов, действующих на маятник, а уравнение (1.2) — баланса сил, действующих на каретку.