

Физика_механика
.pdfМеханика
Билет 1.
Система отсчёта – совокупность системы координат и часов, связанных с телом, относительно которого изучается движение.
Радиус-вектор — это вектор, идущий из начала координат в заданную точку.
Перемещение — изменение положения физического тела в пространстве с течением времени относительно выбранной системы отсчёта.(вектор соединяющий начальную точку и конечную точку движения тела)
Траектория – линия, описываемая материальной точкой при её движении в пространстве.
Путь – это длина траектории
Средняя скорость по перемещению - вектор, равный отношению перемещения ко времени, за которое оно
совершено: =
Мгновенная скорость – предел, к которому стремится средняя скорость при стремлении промежутка
времени Δt к 0 : = |
|
|
= |
|
|
→0 |
|
|
|
Среднее ускорение - отношение изменения скорости к промежутку времени, за который это изменении
произошло: =
Мгновенная ускорение – предел, к которому стремится среднее ускорение при стремлении промежутка
времени Δt к 0 : = |
|
|
= |
|
|
→0 |
|
|
|
Ускорение материальной точки при криволинейном движении:
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
= |
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
= |
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
= |
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
, где и - единичные вектора |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
– тангенциальное ускорение |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
= и = |
|
|
||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
– нормальное ускорение |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
||
|
|
|
||
|
|
|
||
|
+ |
|
|
|
|
|
|
2 |
|
|
|
||
= + |
|
= |
|
+ |
|
|
|
- ускорение при криволинейном движении |
|
|
|||||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Билет 2.
Угловое перемещение - это угол, на который переместился радиус-вектор при перемещении тела из точки 1 в
точку 2: = − 0
Средняя угловая скорость – вектор, равный отношению углового перемещения ко времени, за которое оно
совершено: =
Мгновенная угловая скорость - предел, к которому стремится средняя угловая скорость при стремлении
промежутка времени Δt к 0: = |
|
|
= |
|
|
→0 |
|
|
|
Угловое ускорение – характеристика быстроты изменения угловой скорости: =
Связь между линейными и угловыми величинами:
|
Путь по окружности: = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Связь линейной и угловой скорости: = |
|
= |
( ) |
= |
|
= |
|||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
Связь тангенциального и углового ускорения: |
|
= |
|
|
= |
( ) |
= |
|
= |
||||||
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||||
2
Связь нормального и углового ускорения: = = 2
Билет 3.
Прямая задача кинематики (поступательное движение) позволяет найти при заданном уравнении траектории скорость и ускорение материальной точки:
Дано: |
|
|
|
Решение: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
(t) = ( ) + ( ) + ( ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
= |
|
|
= |
|
|
+ |
|
+ |
|
|
|
|
= |
|||||
|
|
|
|
|
|
|
||||||||||||||||
Найти: |
−? |
−? |
|
|
|
|
2 |
+ |
|
2 |
|
+ |
2 |
|
|
|
||||||
|
|
|
|
= 2 |
|
2 |
2 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Обратная задача кинематики (поступательное движение) позволяет найти при заданных ускорении или скорости уравнение траектории материальной точки:
|
|
|
|
Решение: |
|
Дано: |
= |
|
|
|
|
|
|
= |
|
||
|
|
|
|
||
|
|
|
|
|
|
Найти: |
−? |
|
|
|
|
|
|
|
|
||
|
|
|
|
= ( ) − ( 0) = ∫ = ∫ ( ) |
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|
( ) = ( 0) + ∫ ( ) |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
Прямая задача кинематики (вращательное движение) позволяет найти при заданном уравнении траектории скорость и ускорение материальной точки:
Дано: |
|
|
|
Решение: |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
(t) = ( )+ ( ) + ( ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
= |
|
|
|
= |
|
|
|
+ |
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Найти: |
−? |
−? |
|
|
|
|
|
2 |
|
|
2 |
|
|
2 |
|
|||||
= |
|
|
|
= |
|
|
|
+ |
|
|
|
+ 2 |
||||||||
|
|
|
|
|
2 |
|
2 |
|
||||||||||||
Обратная задача кинематики (вращательное движение) позволяет найти при заданных ускорении или скорости уравнение траектории материальной точки:
|
|
|
Решение: |
|
|
Дано: |
= |
|
|
||
|
|
= |
|
||
|
|
|
|||
|
|
|
|
|
|
Найти: |
−? |
|
|
|
|
|
|
|
|
||
|
|
|
|
= ( ) − ( 0) = ∫ = |
∫ ( ) |
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|
( ) = ( 0) + ∫ ( ) |
|
|
|
|
|
0 |
|
|
|
|
|
|
|

Билет 4.
Законы Ньютона:
Первый закон Ньютона - тело движется равномерно и прямолинейно или сохраняет состояние покоя, если на него не действуют другие тела (законом инерции). Инерциальная система отсчёта – система отсчёта в которой соблюдается первый закон Ньютона.
Второй закон Ньютона - скорость изменения импульса материальной точки во времени равна
|
|
|
|
|
|
результирующей силе, действующей на материальную точку : |
|
|
= |
|
|
|
|
|
|||
Второй закон Ньютона (в другой формулировке) - ускорение, с которым движется материальная точка,
равно отношению результирующей всех сил, действующих на неё, к массе материальной точки:
=
|
|
|
|
= |
|
|
|
|
= |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
||||
Третий закон Ньютона – силы, с которыми две материальные точки действуют друг на друга, имеют одинаковую природу, всегда равны по модулю и направлены в противоположные стороны вдоль
|
|
|
прямой, соединяющей эти точки: 1 |
= −2; | 1| = | 2| |
|
Принцип относительности Галилея:
Все инерциальные системы отсчёта эквивалентны друг другу. Никакими механическими опытами, проведёнными в данной инерциальной системе отсчёта, нельзя определить, движется система или нет.
Принцип относительности Эйнштейна:
Уравнения, выражающие законы природы, инвариантны по отношению к любым инерциальным системам отсчета. Инвариантность – неизменность вида уравнения при переходе из одной системы отсчета в другую (при замене координат и времени одной системы – другими).
Билет 5.
Границы применимости законов классической механики:
Тела макромира (пространственная протяжённость от размеров больших молекул до размеров Солнечной системы)
Скорость движения много меньше скорости света: (с = 3 108м/с)
Постулаты СТО (Специальной теории относительности):
Постулат 1: Принцип относительности Эйнштейна - Законы природы одинаковы во всех системах координат, движущихся прямолинейно и равномерно друг относительно друга. Это означает, что форма зависимости физических законов от пространственно-временных координат должна быть одинаковой во всех инерциальных системах отсчёта, то есть законы инвариантны относительно переходов между инерциальными система отсчёта.
Постулат 2: Принцип инвариантности скорости света - скорость света в вакууме одинакова во всех системах координат, движущихся прямолинейно и равномерно друг относительно друга.
Следствия из постулатов СТО:
Сокращение линейных размеров т.е. линейный размер тела, движущегося относительно
2
инерциальной системы отсчёта, уменьшается в направлении движения: = 0√1 − 2 , где 0 – длина
тела в неподвижной системе отсчёта. Для движущегося наблюдателя длина отрезка кажется
2
уменьшенной в направлении движения в √1 − 2 раз, поперечные размеры тела в обеих системах
одинаковы. Итак, для неподвижного наблюдателя размеры движущегося тела в направлении их движения сокращаются, и тем больше, чем больше скорость движения.
Замедление времени т.е. для движущегося наблюдателя время кажется идущим медленнее: =
0 |
|
, где - промежуток времени между двумя событиями в неподвижной системе отсчета. Чем |
√1− |
2 |
0 |
|
||
с2 |
|
больше скорость, тем больше замедление времени.

Билет 6.
Второй закон Ньютона:
Скорость изменения импульса материальной точки во времени равна результирующей силе, действующей на
материальную точку : =
Второй закон Ньютона (в другой формулировке): |
|
|
|
|
|
|
|
|
|
|
|
|
|
Ускорение, с которым движется материальная |
точка, |
равно отношению результирующей всех сил, |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
действующих на неё, к массе материальной точки: |
|
|
= |
|
|
|
= |
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
||||||
Движение центра инерции тела:
Центр инерции тела (системы тел) движется так, как двигалась бы материальная точка с массой m, равной массе тела (системы тел) под действием результирующей всех внешних сил, приложенных к телу (системе
тел): |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
= |
∑ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|||||||||||
= |
|
= |
|
|
∑ |
|
|
|
|
= |
|
|
∑ |
= |
|
||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
=1 |
|
|
|
=1 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
= |
|
|
= |
|
( |
|
) = |
|
|
|
|
|
= |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
Билет 7. |
|
|
|
|
|
|
|
|
|
|
Третий закон Ньютона: |
|
|
|
|
|
|
|
|
|
|
||
Силы, с которыми две материальные точки действуют друг на друга, имеют одинаковую природу, всегда |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
= |
равны по модулю и направлены в противоположные стороны вдоль прямой, соединяющей эти точки: 1 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
−2; |
| 1| = | 2| |
|
|
|
|
|
|
|
|
|
|
|
Закона изменения импульса: |
|
|
|
|
|
|
|
|
|
|
||
Изменение импульса системы материальных точек за некоторый промежуток времени равно импульсу |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
результирующей всех внешних сил, действующих на систему за этот промежуток времени: |
|
= |
|
|||||||||
Закон сохранения импульса: |
|
|
|
|
|
|
|
|
|
|
||
Сумма импульсов всех тел системы есть величина постоянная, если векторная сумма внешних сил, |
|
|||||||||||
|
|
|
= |
|
|
|
|
|
|
|||
действующих на систему тел, равна нулю: при = 0 следует |
|
|
|
|
|
|
||||||
Закон сохранения импульса формулируют для замкнутой системы тел - системы, на которую не действуют |
|
|||||||||||
внешние силы: импульс замкнутой системы тел есть величина постоянная. |
|
|
|
|
|
|
||||||
Реактивное движение: |
|
|
|
|
|
|
|
|
|
|
||
Движение тела, возникающее при отделении некоторой его части с определённой скоростью относительно |
|
|||||||||||
него. При этом тело получает импульс в противоположном направлении, равный импульсу отделившейся |
|
|||||||||||
|
|
|
|
= |
|
= − |
|
, где |
|
– масса ракеты |
|
|
части. Закон сохранения импульса для реактивного движения: |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– её ускорение |
|
||
|
|
|
|
|
|
|
|
– скорость истечение |
||||
|
|
|
|
|
|
|
|
газов |
|
|
||
|
|
|
|
|
|
|
|
– расход массы |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
топлива в единицу |
|
|||
|
|
|
|
|
|
|
|
времени |
|
|||

Билет 8.
Момент импульса материальной точки относительно некоторого начала отсчёта определяется векторным
|
( = sin = ) |
||
произведением её радиус-вектора и импульса: = [ х ] |
|||
Величина момента импульса относительно оси z равна: |
= sin |
|
= = 2 |
|
|||
|
2 |
|
|
|
|
||
Момент силы – векторная величина, определяемая векторным произведением радиус-вектора и вектора
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
силы: = [ х ] ( = sin = ) |
||||||||||||||||||||||
Уравнение моментов для системы материальных точек: |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
системы |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
= ∑ |
|
|
= ∑ ∑ |
+ ∑ |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
=1 |
=1 =1 |
=1 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
≠ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
= 0 ; |
|
|
− сумма моментов внешних сил |
||||||
∑ ∑ |
|
|
|
∑ |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
=1 =1 |
|
|
|
|
|
|
|
|
|
=1 |
|
|
|
|||||||||
|
|
|
|
|
≠ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
∑ |
|
|
|
|
|
= ∑ |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
=1 |
|
|
|
=1 |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
∑ |
|
= ∑ |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
=1 |
|
|
|
|
|
=1 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
= |
|
|
|
|
|
|
|
|
|
−уравнение моментов для системы материальных точек |
|||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||
Закон сохранения момента импульса:
Суммарный момент импульса системы материальных точек относительно точки – величина постоянная, если векторная сумма моментов всех внешних сил относительно точки, действующих на систему, равна 0.
Билет 9.
Момент инерции материальной точки относительно неподвижной оси – физическая величина, равная произведению массы материальной точки на квадрат расстояния, от материальной точки до оси вращения:
|
|
|
= |
|
2 |
|
|
|
|
|
0 |
|
|
Момент инерции для абсолютно твёрдого тела:
|
|
|
|
|
= ∑ |
|
2 |
= ∑ |
|
2 |
= |
|||||||||||||
= ∑ |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
=1 |
|
|
|
|
=1 |
|
|
=1 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
= |
∑ |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Если |
|
|
и , тогда |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
= ∫ 2 = ∫ 2 = |
|
|
2 |
|
||||||||||||||
= ∑ |
∫ |
|
|
|||||||||||||||||||||
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Теорема Штейнера:
0
Момент инерции твёрдого тела путём интегрирования по V
Момент инерции тела относительно произвольной оси z равен сумме момента инерции этого тела относительно оси, параллельной данной и проходящей через центр масс этого тела, и произведения массы
тела на квадрат расстояния между осями: |
= |
+ 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Билет 10. |
|
|
Момент инерции тонкостенного кольца: |
|
|
|
|||||||||||
Найдём момент инерции относительно оси симметрии: |
|
|
||||||||||||
= ∑ |
2 = ∑ |
|
2 |
= 2 ∑ |
|
= 2; = 2 |
|
|||||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ответ: |
|
|
|
= |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Момент инерции сплошного цилиндра: |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||
Найдём момент инерции относительно оси симметрии, |
|
|
|
|
||||||||
|
|
|
|
|||||||||
проходящей через центр масс: |
|
|
|
|
|
|
|
|||||
|
= |
∫ |
2 |
= 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
2 2 = 2 |
|
3 = 2 |
4 |
|
|
|||||
∫0 |
4 |
|
|
|
|
|
||||||
|
|
∫0 |
|
|
|
|
|
|
|
|
||
2 = ; = = |
2 |
|
|
|
|
|||||||||||
|
|
|
|
|
||||||||||||
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ответ: |
|
|
|
= |
|
|
|
2 |
|
|
|
|
|
|
||
|
|
|
|
|
||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Билет 11.
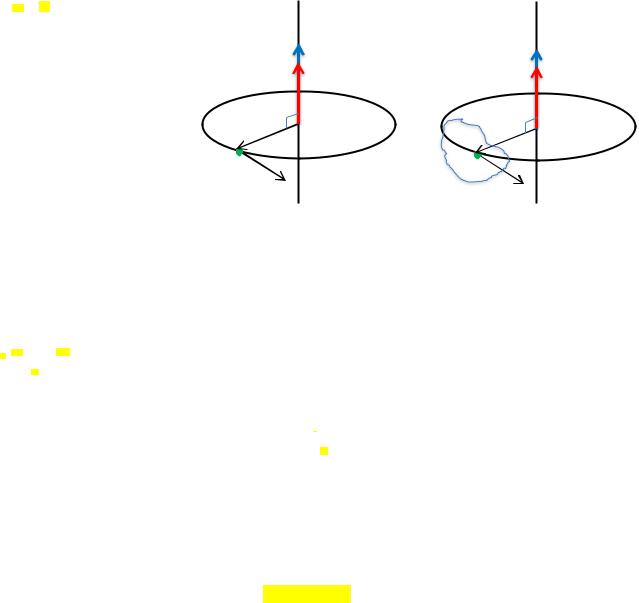
Основное уравнение динамики вращательного движения:
Абсолютно твердое тело, вращающееся относительно неподвижной оси. Момент импульса тела относительно
оси: |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Скорость изменения момента импульса: |
|
= |
||||||||||||||||||||
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Учитывая, что |
|
|
|
|
|
|
= , то |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
||||||||||||||||
|
|
= , а |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
- основное уравнение вращательного движения |
|||||||||
= |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Угловое ускорение тела прямо пропорционально сумме моментов внешних сил, действующих на тело, и обратно пропорционально моменту инерции тела.