

01_Абрамкин_ЭМЭиС_2019
.pdf– характеристики, показывающие взаимосвязь между различными координатами – как управляющими, так и управляемыми, например зависимость между напряжением питания и скоростью или между током и коэффициентом полезного действия (КПД).
В частности, в ЭМС при изменяющихся нагрузках и управляющих воздействиях определяют кривые изменения механических величин: скорости ω, угла поворота θ, момента M и электрических величин: тока ЭД i, КПД η, потребляемой мощности, cos φ и др.
Анализ ЭМС можно производить на макро- и микроуровнях. На макроуровне – уровне структурного анализа – изучают выходные управляемые координаты (скорость, угол поворота, токи в обмотках ЭД). На микроуровне – уровне функционального (поэлементного) анализа – изучают процессы в отдельных элементах и устройствах ЭМС, например сигналы на выходах датчиков и регуляторов, сигналы управления транзисторами усилителя мощности, обратные напряжения на диодах транзисторных ключей и т. п.
Известны 2 способа анализа – аналитический и моделирование. Аналитический анализ связан с выводом законченных математических выражений для расчета соответствующих характеристик. Следует отметить, что аналитический анализ возможен только на макроуровне при условии значительной идеализации элементов ЭМС. Компьютерное моделировании позволяет более детально учитывать свойства реальных ЭМС. При этом модель ЭМС представляет собой систему математических уравнений, которые автоматически решаются на компьютерах различными методами. Наиболее распространены численные методы.
Синтез – это определение вида управляющих воздействий, выбор структуры и расчет параметров управляющих устройств (регуляторов) [7]. Синтез осуществляется в процессе проектирования.
Любую ЭМС можно представить в виде неизменяемой и изменяемой частей. Неизменяемая часть состоит из устройств (двигателя, редуктора, усилителя мощности, датчиков и т. п.), выбор которых осуществляется исходя из требований к силовым параметрам (моменту, скорости, ускорению нагрузки, значениям напряжения и тока ЭД и т. п.). Следует отметить, что компоненты неизменяемой части выбираются из имеющейся номенклатуры соответствую-
щих изделий и поэтому их выбор ограничен.
Изменяемая часть – это управляющее устройство (регулятор). Иногда к ней относят и датчики, если их параметры выбирают в процессе синтеза.
20
Контрольные вопросы
1.Дайте определение понятию «электромеханическая система».
2.Приведите структурную схему автоматизированного электропривода. Поясните функции элементов, входящих в ее структуру.
3.Сколько типов СУ Вы знаете? Приведите их структурные схемы. Поясните принцип их работы.
4.Какие основные функции САУ ЭП Вы знаете?
5.Какие дополнительные функции САУ ЭП Вы знаете?
6.Приведите классификацию ЭМС.
7.Нарисуйте структурную схему первой группы САУ ЭП. Поясните принцип ее работы.
8.Нарисуйте структурную схему второй группы САУ ЭП. Поясните принцип ее работы.
9.Нарисуйте структурную схему третьей группы САУ ЭП. Поясните принцип ее работы.
10.Нарисуйте структурную схему четвертой группы САУ ЭП. Поясните принцип ее работы.
11.Нарисуйте структурную схему пятой группы САУ ЭП. Поясните принцип ее работы.
12.Нарисуйте структурную схему шестой группы САУ ЭП. Поясните принцип ее работы.
13.Нарисуйте структурную схему седьмой группы САУ ЭП. Поясните принцип ее работы.
14.Опишите задачи анализа ЭМС.
15.Дайте определение понятию «синтез ЭМС».
21

2. РАЗОМКНУТЫЕ ЭЛЕКТРОМЕХАНИЧЕСКИЕ СИСТЕМЫ
Для автоматического управления ЭП применяются различные релейноконтактные и бесконтактные аппараты, логические элементы, путевые выключатели, а также вспомогательные электрические машины и аппараты [11].
Обработка информации в САУ ЭП осуществляется в форме электрических сигналов. Управляющее воздействие на ЭП производится изменением параметров системы электропитания. В соответствии с этим электрические цепи делятся на две категории: цепи главного тока и вспомогательные цепи. К цепям главного тока относятся силовые цепи ЭД, генераторов и полупроводниковых преобразователей. Вспомогательные цепи включают катушки релейноконтактной аппаратуры, вспомогательные контакты контакторов и контакты реле. Кроме того, к вспомогательным цепям относятся цепи сигнализации, защиты и блокировки.
|
|
2.1. Системы управления двигателями постоянного тока |
||||||
|
Управление пуском, реверсом и торможением ДПТ осуществляется в функ- |
|||||||
циях времени, скорости, тока или пути. Рассмотрим несколько типовых схем, в ко- |
||||||||
+ |
|
|
– |
торых реализуются эти режимы [11]. |
||||
|
|
KM2.1 |
|
На рис. 2.1 показана схема пуска ДПТ |
||||
|
|
|
независимого возбуждения (НВ) в функ- |
|||||
|
|
|
KM1.1 |
|||||
|
|
|
|
|
|
|
|
|
|
M |
|
|
ции времени. |
|
|
|
|
|
|
Rп |
|
Обмотка |
возбуждения |
двигателя |
||
|
|
SB1 |
|
|||||
|
|
KM1 |
|
|
|
|
|
|
|
SB2 |
|
глухо подключена к шинам питания сети |
|||||
|
|
|
||||||
|
|
|
|
постоянного тока. Это исключает возмож- |
||||
|
|
KM1.2 |
|
ность аварийной работы ЭД с разомкнутой |
||||
|
|
|
KT |
|||||
|
|
|
цепью возбуждения. |
|
|
|||
|
|
|
|
|
|
|||
|
KM1.3 |
|
|
Силовую цепь СУ образует якорь ЭД |
||||
|
|
|
|
с последовательно включенным пусковым |
||||
|
|
KT |
KM2 |
токоограничивающим сопротивлением Rп |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
и замыкающий главный контакт KM1.1 ли- |
||||
|
|
|
|
нейного контактора KM1. Пусковое сопро- |
||||
|
Рис. 2.1. Схема пуска ДПТ НВ |
тивление |
Rп |
может |
быть |
исключено |
||
|
|
в функции времени |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
из цепи (шунтировано) замыкающим глав- |
||||
ным контактом KM2.1 контактора KM2. Контактор KM1 обеспечивает питание |
||||||||
цепи якоря ЭД, а KM2 – шунтирование Rп через определенный промежуток |
||||||||
22
времени, который задается при настройке электромагнитного реле времени KT. Кроме силового контактор KM1 имеет также замыкающий KM1.2 и размыкающий KM1.3 вспомогательные контакты. Первый (KM1.2) выполняет функцию блок-контакта кнопки пуска SB1, а второй (KM1.3) – запускает выдержку времени.
При подаче в схему электропитания происходит возбуждение ЭД и срабатывание реле времени KT, размыкающий контакт которого с замедлением при возврате отключает питание катушки контактора KM2. При настройке время замедления устанавливается таким образом, чтобы оно соответствовало скорости вращения или току якоря, при которых должно отключиться Rп.
Управление двигателем осуществляется кнопками пуска SB1 и остановки SB2. Эти кнопки не фиксируются в определенном положении, чтобы избежать повторного включения ЭД без команды оператора.
При нажатии кнопки SB1 на контактор KM1 подается электропитание. При этом главный контакт КМ1.1 подключает к сети цепь якоря ЭД. Одновременно вспомогательный контакт КМ1.2 шунтирует кнопку SB1 для исключения разрыва цепи электропитания при ее отпускании. Двигатель начинает разгон с включенным пусковым сопротивлением Rп. Срабатывание контакта KM1.3 вызывает размыкание цепи электропитания реле времени KT и замыкание цепи электропитания катушки контактора KM2. Он своим главным контактом KM2.1 шунтирует Rп. Так как замыкание контактов KT происходит с замедлением, то срабатывание KM2 и отключение Rп происходит через некоторое время после включения контактора KM1.
Значение Rп выбирается из условия ограничения пускового тока максимально допустимым значением. Время отключения настраивается из условия снижения Rп до минимально допустимого значения.
Нажатие на кнопку остановки SB2 разрывает цепь электропитания катушки контактора KM1. Цепь якоря ЭД отключается от сети, и СУ возвращается в исходное состояние.
Если в процессе работы ЭД произойдет отключение электропитания СУ на время, превышающее время возврата контактора KM1, или напряжение в сети понизится до уровня, соответствующего току отпускания этого контактора, то произойдет отключение ЭД. После этого повторный запуск будет возможен только после устранения неисправности в цепи электропитания. Таким образом,
23

электромагнитные реле схемы управления помимо своих основных функций обеспечивают также защиту ЭД от работы при пониженном напряжении.
+ |
|
|
|
– |
|
|
KM2.1 |
KM3.1 |
|
|
|
|
|
KM1.1 |
|
|
M |
|
|
|
|
R |
R |
п2 |
|
|
п1 |
|
|
R |
т |
KM4.1 |
|
|
|
|
|
|
|
KM2 |
R |
|
|
|
|
|
р1 |
|
|
KM3 |
R |
|
|
|
р2 |
|
|
|
|
SB1 |
KM1 |
|
SB2 |
|
|
|
|
|
|
|
KT |
KM1.2 |
|
|
|
KM4 |
|
|
|
|
|
KM1.3 |
|
|
|
|
|
|
KT |
Рис. 2.2. Схема пуска ДПТ НВ в две ступени
идинамического торможения
вфункции времени
Переключение ступеней пускового резистора осуществляется сигналом управления, в качестве которого используется электродвижущая сила (ЭДС) якоря, пропорциональная скорости вращения. При этом ЭДС будет равна напряжению на якоре, если не учитывать падение напряжения на активном сопротивлении. На рис. 2.2 показана схема СУ пуском ЭД в две ступени и динамического торможения в функции времени. Катушки контакторов KM2 и KM3 подключены параллельно щеткам ЭД через регулировочные резисторы Rр1 и Rр2. Контакторы KM2 и KM3 шунтируют своими главными контактами KM2.1 и KM3.1 пусковые резисторы Rп1 и Rп2. С помощью регулировочных резисторов Rр1 и Rр2 настраивается напряжение срабатывания каждого контактора на
24
желаемое значение ЭДС (скорости), при которой будет отключаться соответствующая часть пускового резистора Rп1 + Rп2. При этом увеличение сопротивления повышает напряжение срабатывания, так как усилие электромагнита, вызывающее замыкание или размыкание контактов, определяется силой тока в катушке.
Режим динамического торможения возникает при шунтировании якоря тормозным резистором Rт, подключение которого осуществляется главным замыкающим контактом KM4.1 контактора торможения KM4. Длительность торможения настраивается с помощью реле времени KT, замыкающий контакт которого включен в цепь электропитания катушки контактора KM4.
После подачи электропитания ЭД возбуждается, но все элементы СУ остаются в исходном состоянии. Пуск осуществляется нажатием на кнопку SB1, после чего срабатывает контактор KM1, цепь якоря через KM1.1 подключается к сети и начинается разгон ЭД с полностью включенным пусковым резистором Rп1 + Rп2. С увеличением скорости вращения напряжение на щетках растет и при скорости ω1 ≡ Eя1 срабатывает контактор KM2, шунтируя первую ступень резистора Rп1. При скорости ω2 ≡ Eя2 срабатывает контактор KM3, шунтируя вторую ступень резистора Rп2. Таким образом, пусковой резистор оказывается полностью шунтированным и ЭД выходит на естественную характеристику.
В течение всего времени работы ЭД катушка реле времени KT остается подключенной к сети через вспомогательный переключающий контакт KM1.3. Поэтому контакт реле KT также остается замкнутым, но это не влияет на состояние контактора KM4, так как цепь его катушки разомкнута вспомогательным контактом KM1.
Отключение ЭД происходит при переходе в режим динамического торможения. Для этого нажимают кнопку остановки SB2. Происходит размыкание цепи электропитания KM1 и цепь якоря ЭД отключается от сети. Одновременно через переключающий контакт KM1.3 включается KM4. Он шунтирует якорь ЭД через свой главный контакт KM4.1 тормозным резистором Rт, и отключается питание реле времени KT. Однако размыкание контакта реле KT и отключение контактора торможения KM4 осуществляется с заданной выдержкой времени. После окончания торможения СУ возвращается в исходное состояние.
25

|
Режим динамического торможения при отключении ЭД также можно ре- |
|||||
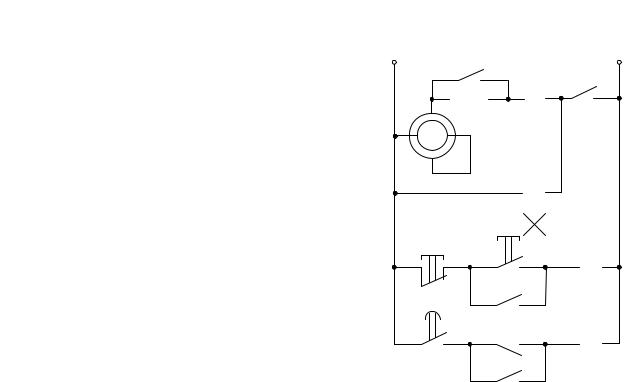
ализовать в функции ЭДС (рис. 2.3). Здесь пуск ЭД осуществляется в функции |
||||||
+ |
|
|
– |
времени в одну ступень аналогично |
||
|
|
|
|
|||
|
|
|
KM2.1 |
схеме на рис. 2.1. |
|
|
|
|
|
Динамическое |
торможение |
осу- |
|
|
|
|
KM1.1 |
|||
|
M |
|
|
ществляется шунтированием якоря ЭД |
||
|
|
|
R |
|||
|
|
|
|
|
|
|
|
|
KM3.1 |
п |
резистором Rт посредством замыкания |
||
|
R |
|
||||
|
т |
|
|
главного контакта |
KM3.1 контактора |
|
|
|
|
|
|||
|
|
KM3 |
|
KM3. Его катушка подключена к щеткам |
||
|
|
|
|
|||
|
KM1.4 |
|
|
ЭД через вспомогательный размыкаю- |
||
|
|
|
|
|||
|
|
SB1 |
|
щий контакт KM1.4, который предот- |
||
|
|
KM1 |
вращает возможность включения кон- |
|||
|
SB2 |
|
||||
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
тактора KM3 во время работы ЭД. |
|
|
|
|
KM1.2 |
|
После нажатия |
на кнопку |
оста- |
|
|
|
|
|||
|
|
|
KT |
новки SB2 линейный контактор KM1 |
||
|
|
|
|
|||
|
KM1.3 |
|
|
и цепь якоря ЭД отключаются от сети, |
||
|
|
|
|
|
|
|
|
|
|
|
а катушка контактора торможения KM2 |
||
|
|
KT |
KM2 |
подключается к щеткам якоря. Под дей- |
||
|
|
ствием ЭДС якоря в цепи катушки KM3 |
||||
|
|
|
||||
|
|
|
|
|||
|
|
|
|
возникает ток, его контакт KM3.1 замы- |
||
|
Рис. 2.3. Схема пуска ДПТ НВ |
кается и подключает тормозной рези- |
||||
|
стор Rт. Процесс торможения осуществ- |
|||||
|
в функции времени и динамического |
|||||
|
торможения в функции ЭДС |
ляется до тех пор, пока скорость враще- |
||||
|
|
|
|
|||
ния и значение ЭДС не понизятся до уровня, при котором ток катушки контак- |
||||||
тора KM3 окажется меньше тока отпускания. |
|
|
||||
|
Рассмотрим работу СУ пуском ДПТ последовательного возбуждения |
|||||
(ПВ) в функции тока якоря (рис. 2.4). |
|
|
|
|||
|
В данной схеме катушка реле тока KA включена последовательно в цепь |
|||||
якоря ЭД, а ее размыкающий контакт – в цепь электропитания контактора KM2, |
||||||
управляющего через главный контакт KM2.1 пусковым резистором Rп. Ток отпус- |
||||||
кания реле KA настраивается на уровне нижней границы переключения. Правильная работа схемы на рис. 2.4 осуществляется, только если реле
тока KA при включении срабатывает до того, как включится контактор KM2. Это условие обеспечивается дополнительным реле KV с замедленным временем срабатывания. Его замыкающий контакт включен в цепь электропитания катушки KM2. При включении линейного контактора KM1 ток в цепи якоря
26
ЭД значительно превышает ток срабатывания реле KA. Оно включается и раз- |
|||||
рывает цепь катушки KM2 до того, как сработает реле KV и соединит эту цепь |
|||||
с источником питания. Поэтому контактор |
+ |
KM2.1 |
|
KA |
– |
|
|
|
KM1.1 |
||
KM2 остается отключенным, а пусковой рези- |
|
|
|
|
|
|
|
|
|
|
|
стор Rп включенным в цепь якоря до тех пор, |
|
Rп |
|
|
|
пока ток катушки реле KA не уменьшится до |
|
M |
|
|
|
|
|
|
KV |
|
|
силы тока отпускания. После этого размыкаю- |
|
|
|
|
|
|
|
|
|
|
|
щий контакт реле KA замкнется, контактор |
|
|
|
|
|
KM2 включится и зашунтирует пусковой рези- |
|
|
SB1 |
|
|
|
|
|
|
KM1 |
|
стор Rп. При этом вспомогательный замыкаю- |
|
SB2 |
|
|
|
|
|
|
|
||
щий контакт KM2.2 блокирует контакт реле тока KA, исключая возможность повторных отключений контактора KM2 при случайных бросках тока якоря.
Значительно более сложные задачи управления ДПТ НВ, такие, как реостатный пуск и реверс, решаются с помощью схемы на рис. 2.5 [11].
|
KM1.2 |
KV |
KM2 |
|
|
|
KA |
|
KM2.2 |
Рис. 2.4. Схема пуска ДПТ ПВ |
|
в функции тока якоря |
|
Вэтой схеме для подключения якоря ЭД к сети используются контакторы KM1 и KM2, их главные контакты KM1.2, KM1.3, KM2.2, KM2.3 соединены
вмостовую схему. В диагональ моста включен якорь ЭД. При переключении контакторов изменяется полярность напряжения на якоре ЭД.
Вцепи якоря ЭД установлен токоограничивающий резистор Rп1 + Rп2 с от-
водами. Управление им осуществляется главными контактами KM3.1 и KM4.1 контакторов KM3 и KM4. В режиме пуска с помощью KM4.1 подключается резистор Rп1. В режиме торможения противовключением с помощью KM3.1 подключается резистор Rп2 и соответственно работает весь резистор Rп1 + Rп2.
Контакторы KM3 и KM4 включаются через замыкающие контакты реле KV1 или KV2. Электропитание этих реле осуществляется через отвод на резисторе противовключения Rп2. Сопротивление между отводом и отрицательной шиной питания должно обеспечивать такое падение напряжения на нем, которое создается током якоря ЭД в режиме противовключения, чтобы была исключена возможность срабатывания реле KV1 и KV2. В двигательном режиме падение напряжения на указанном сопротивлении должно быть не достаточным для блокировки срабатывания. Другими словами, это сопротивление должно обеспечивать срабатывание реле KV1 и KV2 при токе Iя ≤ Iп = Uс / rя,
27

где Iя – ток якоря; Iп – пусковой ток; Uс – напряжение сети и rя – сопротивление якоря.
+ |
– |
KV2
KM2.1
KM1.3 KM2.3
M
KM2.2 KM1.2
KM1.1 |
KV1 |
|
|
|
|
|
|
KM4.1 |
KM3.1 |
||
R |
п1 |
R |
|
|
|
п2 |
|
|
|
|
KT |
SB3 |
SB1 |
SB2 |
|
|
KM1.4 |
KM2.4 |
KV2 |
KV1 |
KT |
|
KM1
KM2
KM3
KM4
Рис. 2.5. Схема реостатного пуска и реверса ДПТ НВ
В цепь электропитания катушки пускового контактора KM4 кроме контакта реле KV2 включен также размыкающий контакт реле времени KT, который осуществляет задержку отключения пускового резистора Rп1 аналогично СУ на рис. 2.1. Электропитание катушки реле KT в этой схеме, в отличие от рассмотренных ранее схем, отключается не разрывом цепи, а шунтированием ее контактом KM3.1.
Пуск ЭД в одном из направлений осуществляется кнопками SB1 и SB2. Эти кнопки имеют 2 механически и электрически соединенных контакта, т. е. по сути, переключающий контакт. Замыкающий контакт каждой кнопки соединен последовательно с размыкающим контактом другой. Это исключает
28
возможность одновременного включения контакторов прямого и обратного вращения.
Пуск ЭД в любом направлении – одноступенчатый в функции времени. При нажатии кнопки SB1 срабатывает контактор KM1 и подключает с помощью главных контактов KM1.1, и KM1.3 якорь ЭД к сети. Одновременно за счет падения напряжения на Rп2 срабатывает реле времени KT, соответственно разрывается цепь катушки пускового контактора KM4. С некоторым запаздыванием включается реле KV1 и замыкает цепь электропитания контактора противовключения KM3. Это приводит к шунтированию с помощью контакта KM3.1 сопротивления Rп2, отключению реле KT и началу отсчета выдержки времени. Двигатель разгоняется с включенным пусковым резистором Rп1. По окончании задержки контакт KT замыкается, контактор KM4 включается и шунтирует пусковой резистор Rп1, выводя ЭД на естественную характеристику.
Для реверса необходимо нажать кнопку SB2, в результате чего отключатся контакторы KM1, KM4 и реле KV1 и включится контактор KM2. Напряжение на якоре с помощью контактов KM2.1, KM2.2 и KM2.3 изменит полярность, и ЭД перейдет в режим торможения противовключением с суммарным токоограничивающим сопротивлением Rп1 + Rп2. При этом включится также реле времени KT. Реле KV2 остается отключенным, пока скорость ЭД не снизится почти до нуля. Затем оно включается и запитывает катушку контактора KM3. В результате резистор Rп2 будет зашунтирован контактом KM3.1 и начинается отсчет времени пуска. После этого ЭД разгоняется в противоположную сторону по описанному ранее алгоритму.
2.2. Системы управления асинхронными двигателями
Системы управления АД релейно-контактного типа строятся по тем же принципам, что и схемы управления ДПТ.
На рис. 2.6 [11] показана простейшая СУ короткозамкнутым АД на основе магнитного пускателя. Он состоит из контактора переменного тока KM, двух тепловых реле KK, двух кнопок управления SB1 и SB2, объединенных в одном корпусе.
Эта схема реализует функции прямого пуска АД и отключения его от сети. Схемой также предусмотрена защита АД плавкими предохранителями FU1–FU3 от коротких замыканий и тепловыми реле KK от перегрузки. Размыкающий контакт тепловых реле KK после срабатывания защиты фиксируется
29