

Лекційна робота №8
РЕГУЛЮВАННЯ ШВИДКОСТІ АСИНХРОННИХ ДВИГУНІВ ЗМІНОЮ КІЛЬКОСТІ ПАР ПОЛЮСІВ
Можливість регулювання швидкості даним способом випливає з виразу
2 |
f |
, з якого видно, що зміною кількості пар полюсів p можна |
|
p |
|||
|
|
ступінчасто регулювати швидкість двигуна.
Цей спосіб регулювання швидкості застосовується лише для короткозамкнених двигунів, ротор яких автоматично пристосовується до зміни кількості пар полюсів. Двигуни, що допускають регулювання швидкості зміною кількості пар полюсів, називаються багатошвидкісними.
Для зміни кількості пар полюсів використовуються дві конструкції двигунів: з декількома обмотками на статорі, покладеними в ті самі пази; з однією обмоткою, що допускає перемикання її секцій для одержання різної кількості пар полюсів.
Багатошвидкісні двигуни з декількома незалежними обмотками на статорі за технічними показниками поступаються однообмотковим (менші значення ККД та cos ). Тому найбільше поширення одержали багатошвидкісні двигуни з перемиканням секцій обмоток.
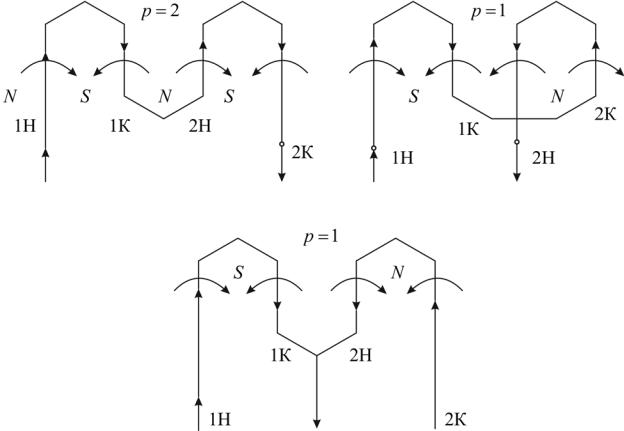
Найбільш просте перемикання кількості пар полюсів реалізується з відношенням 1:2. У цьому випадку обмотки кожної фази виконуються у вигляді двох секцій. Зміна напрямку струму в одній з них (паралельне або послідовне з’єднання) спричиняє зміну кількості пар полюсів у два рази.
На рис. 8.1 показана схема однієї фази статорної обмотки, що складається з двох однакових частин 1Н-1К та 2Н-2К. Якщо частини обмотки з’єднані послідовно, як це показано на рис. 8.1, а, то утворюється магнітне поле з чотирма полюсами, тобто р 2. Залишивши напрямок струму тим самим, змінивши схему з’єднання частин обмоток, як показано на рис. 8.1, б, статорна обмотка утворює магнітне поле з р 1. Зменшення вдвічі кількості пар полюсів досягається також шляхом паралельного з’єднання частин обмоток (рис. 8.1, в).
а) |
б) |
в)
Рисунок 8.1 – Схеми перемикань частин обмоток статора для зміни кількості пар полюсів
На практиці найбільш часто застосовують дві схеми перемикання обмоток статора багатошвидкісних асинхронних двигунів: перемикання з трикутника на подвійну зірку; із зірки на подвійну зірку.
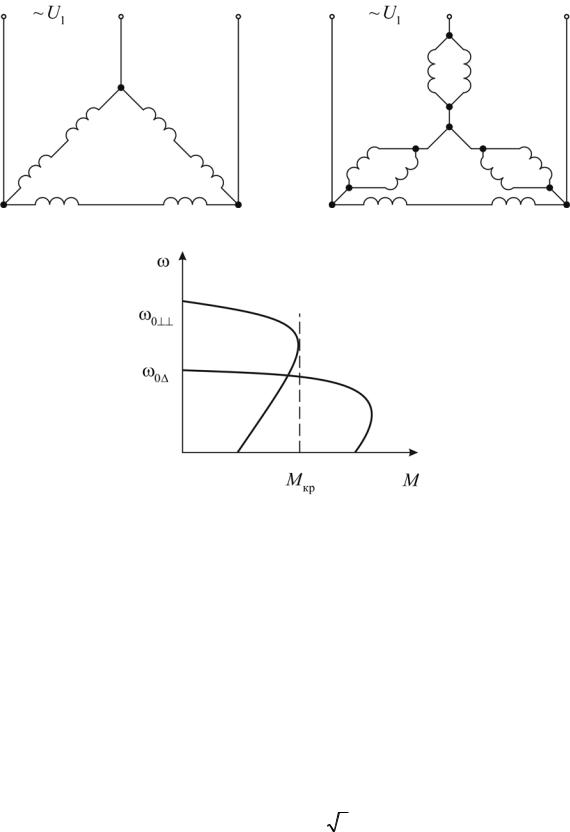
У першому випадку, при з’єднанні в трикутник (рис. 8.2), секції з’єднуються послідовно. При з’єднанні обмоток статора в подвійну зірку, секції обмоток з’єднуються паралельно і кількість пар полюсів зменшується вдвічі.
а) |
б) |
в)
Рисунок 8.2 – З’єднання обмоток статора в трикутник (а), подвійну зірку (б) та механічні характеристики (в) при цих схемах з’єднання обмоток
Для визначення допустимого моменту знайдемо потужність, споживану двигуном, для наведених схем вмикання обмоток статора. Допустимий струм Iдоп Iн залишається незмінним для обох схем. При цьому допустима потужність:
– при з’єднанні в трикутник Рдоп1 3U1Iн cos 1;
– при з’єднанні в подвійну зірку Рдоп2 |
3U12I1н cos 2 3,46U1I1н cos 2. |
Наведені вирази свідчать, що при cos 1 cos 2 допустима потужність залишається приблизно однаковою. Тому при зменшенні вдвічі кількості пар полюсів (збільшується вдвічі швидкість) допустимий момент Mдоп Рдоп /
також зменшується в два рази. Механічні характеристики при цьому мають вигляд, показаний на рис. 8.2, в.
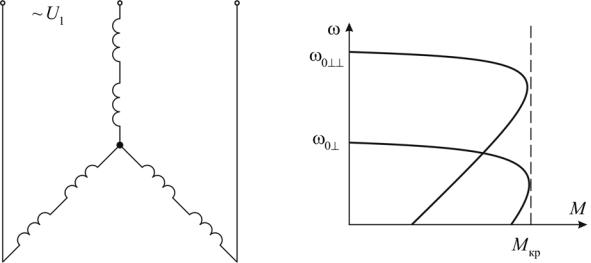
При з’єднанні в зірку (рис. 8.3, а) секції обмоток статора також з’єднуються послідовно, утворюючи таку ж кількість пар полюсів, як і при з’єднанні в трикутник. При з’єднанні в подвійну зірку кількість пар полюсів зменшується вдвічі, однак при цьому збільшується практично в два рази і потужність, що споживається. Тому допустимий момент при перемиканні з зірки на подвійну зірку залишається однаковим і характеристики мають вигляд, представлений на рис. 8.3, б.
Двошвидкісні асинхронні двигуни серії 4А випускають з частотою обертання 3000/1500, 1500/750 і 1000/500 об/хв, а також 1500/1000 і 1000/750 об/хв, в яких переключення обмоток відбувається по більш складних схемах. Тришвидкісні асинхронні двигуни мають дві незалежні обмотки статора: одну з перемиканням, а другу без перемикання. У серії 4А передбачено три типи тришвидкісних двигунів зі співвідношенням частот обертання: 1000/1500/3000; 750/1500/3000 і 750/1000/1500 об/хв.
Чотиришвидкісні з частотами обертання 3000/1500/1000/750 та 1500/1000/750/500 мають дві обмотки з перемиканням кількості пар полюсів.
а) б)
Рисунок 8.3 – З’єднання обмоток статора в зірку (а) та механічні характеристики при перемиканні з зірки на подвійну зірку (б)

Розглянутий спосіб регулювання швидкості асинхронних двигунів з короткозамкненим ротором зміною кількості пар полюсів характеризується простотою реалізації, високою жорсткістю механічних характеристик, малими втратами енергії, оскільки регулювання реалізується зміною кутової швидкості магнітного поля і не супроводжується ростом втрат потужності в роторному колі.
Недоліком розглянутого способу є ступінчасте регулювання швидкості та порівняно невеликий діапазон регулювання, що в основному не перевищує 6:1. Тому багатошвидкісні асинхронні двигуни використовуються в механізмах, які не вимагають плавного регулювання швидкості.
АСИНХРОННІ ПРИВОДИ ЗІ СКАЛЯРНИМ КЕРУВАННЯМ
Скалярне керування асинхронним електроприводом забезпечує необхідні статичні характеристики і застосовується для приводів, що не вимагають точної підтримки моменту в перехідних режимах. На вході таких систем вмикаються в основному задавачі інтенсивності, що обмежують прискорення приводу на заданому рівні.
Усі закони скалярного керування базуються на математичному описі асинхронної машини в усталеному режимі в обертовій системі координат, що доповнюються виразом для потокозчеплення від основного магнітного потоку
m Lm I1 I2 .
Вусталеному режимі всі просторові вектори нерухомі і незмінні за величиною, а похідні від потокозчеплення дорівнюють нулю. При цьому рівняння після перетворення приймають вигляд:
|
|
* |
|
R*I* |
|
|
R*I* |
|
|
|
||
U |
|
* |
|
* * |
* |
|
||||||
|
1 |
|
1 1 |
j 1 |
|
1 1 |
jx1I1 |
j m ; |
(8.1) |
|||
|
|
|||||||||||
k |
|
|
k |
|
|
|
k |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
|
R* |
|
|
|
|
|
R* |
|
|
* |
|
|
|
|
|
|
|
|
* |
* |
|
I |
|
* |
|
* |
* |
|
|||
|
|
|
2 |
|
|
||||||||||
0 |
2 |
I2 |
j 2 |
|
2 |
|
jx2I2 |
j m , |
(8.2) |
||||||
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
де k zn * – абсолютне ковзання.
|
У |
наведених |
виразах |
прийняті |
відносні |
|
величини: |
|
U1* U1 /Uб; |
|||||||||||||||
R* |
R / R ; * / |
б |
; |
* / ; |
R* |
R / R ; |
|
I* I |
2 |
/ I |
б |
; |
|
* |
|
2 |
/ |
; |
||||||
1 |
1 |
б |
1 |
1 |
|
|
|
б |
2 |
|
2 б |
|
2 |
|
|
|
2 |
|
б |
|
||||
X * L / R ; |
X * |
L |
/ R ; |
X * L |
|
/ R ; |
k |
/ ; |
|
X * L / R . |
||||||||||||||
1 |
б 1 |
б |
1б |
|
б 1б |
б |
2б |
б 2б |
б |
k |
|
б |
|
|
|
2 |
б 2 |
б |
|
|||||
базові величини прийняті: |
Uб U1ф.max; |
Iб I1max; |
б 1 |
2 f ; |
Rб Uб / Iб; |
|||||||||||||||||||
Lб U / бIб; б Uб / б.
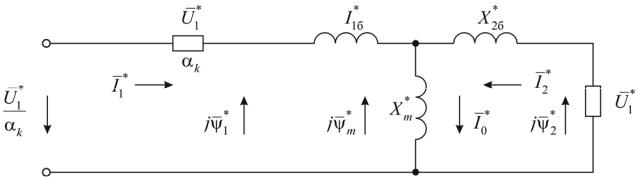
За допомогою (8.1) і (8.2) можна одержати схему заміщення асинхронного двигуна в усталеному режимі, що подана на рис. 8.4.
Згідно зі схемою заміщення можна установити основні скалярні закони
|
|
|
|
|
|
|
керування асинхронним двигуном: U |
1 const; |
const; |
|
m |
const; |
|
k |
1 |
|
|
|||
|
|
|
|
|||
2 const. |
|
|
|
|
||
Рисунок 8.4 – Схема заміщення асинхронно го двигуна в усталеному режимі (відносні одиниці)
Для зазначених законів керування рівняння для моменту двигуна
знаходиться зі схеми заміщення рис. 8.4:
M * |
|
|
U1* / k 2 R2* / k |
|
; |
|||||||||||||
|
|
|
|
|
2 |
|
|
|
R* |
|
|
R* |
|
2 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
* |
* |
|
|
|
|
|
|
||||||
|
|
X1 X2 |
|
|
|
|
1 |
|
2 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|||
* |
|
|
|
|
|
*2R* |
/ |
|
|
|
|
|
; |
|
||||
M |
|
|
|
1 |
|
2 |
|
|
k |
|
|
|
|
|
||||
X1* X2* |
2 |
R2* / 2 |
|
|||||||||||||||
|
|
|
|
* |
|
*2R* |
/ |
|
|
|
; |
|
|
|
||||
|
M |
|
|
m |
|
2 |
|
|
k |
|
|
|
|
|
||||
|
|
X2* |
R2* / 2 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
M * *22 R2* / k ;
R2* / 2
(8.3)
(8.4)
(8.5)
(8.6)
де M * M / Mн |
– відносне значення моменту. |
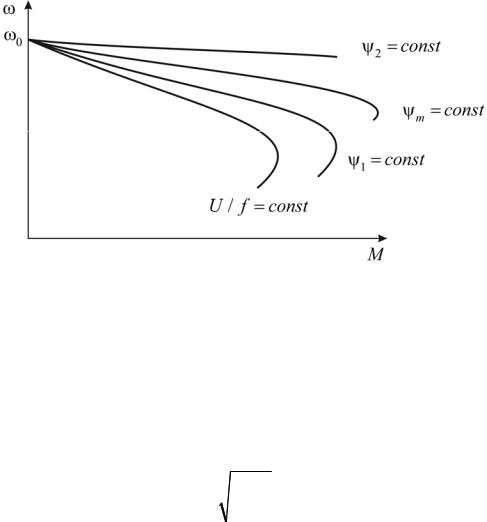
На рис. 8.5 наведені механічні характеристики асинхронного двигуна для |
|
розглянутих законів керування без урахування насичення магнітного кола. |
|
Найпростішим |
з перерахованих способів є U1* / к const або |
U / f const. Цей закон керування при наявності інвертора з ШІМ реалізований практично у всіх перетворювачах, пропонованих на ринку. Зручність цього способу полягає в тому, що електропривод може працювати без зворотних зв’язків і мати природну жорсткість механічної характеристики. Даний спосіб регулювання широко використовується в електроприводах з Мс const, які не потребують великої швидкодії, та при відсутності різких і частих коливань навантаження.
Для механізмів, в яких момент опору є функцією швидкості Мс f ( ) використовуються інші співвідношення між напругою та частотою, з метою
збереження незмінної перевантажувальної здатності дв Мкр / Мс у всьому діапазоні регулювання швидкості, де Мкр,Мс – критичний момент двигуна та статичний момент опору при заданій швидкості.
Рисунок 8.5 – Механічні характеристики асинхронного двигуна при різних законах керування
Закон зміни напруги і частоти, що задовольняє відзначеній вище вимозі, має вигляд
|
|
|
U1 |
|
f1 |
|
Мс |
, |
|
(8.7) |
|
|
U1н |
f1н |
|
|
|||||
|
|
|
|
Мс.н. |
|
|
||||
де Мс.н. – момент опору, що відповідає номінальній швидкості. |
||||||||||
Для механізмів з |
вентиляторним |
навантаженням |
Мс К 2 |
|||||||
співвідношення |
між |
напругою |
і |
частотою |
згідно з (8.7) має вигляд |
|||||
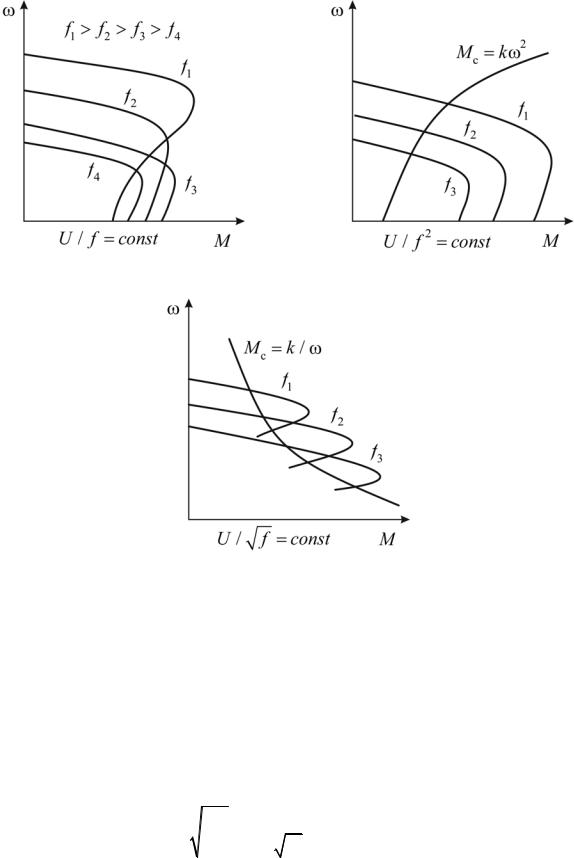
U / f 2 const, |
якому |
відповідають |
механічні |
характеристики, |
зображені на |
|||||
рис. 8.6, б. |
|
|
|
|
|
|
|
|
|
|
а) |
б) |
в)
Рисунок 8.6 – Механічні характеристики розімкнених асинхронних електроприводів зі скалярним керуванням з різним співвідношенням U / f
Якщо регулювання здійснюється з постійною потужністю Pдоп Рн, то
Мс Рн / Мс.н. н / Мс.н. f1н / f |
і згідно з (8.7) маємо |
|
||||||
|
U1 |
|
f1 |
або |
|
U1 |
const. |
(8.8) |
|
|
|
|
|||||
U1н |
f1н |
|
f1 |
|
||||
Механічні характеристики, що відповідають цьому закону регулювання, наведені на рис. 8.6, в.
При малих частотах і, отже, напругах живлення двигуна зростає роль спаду напруги на активному опорі статора. Якщо знижувати напругу живлення за законом U1 / f1 const, то це призводить до зменшення магнітного потоку і характеристики мають вигляд, показаний на рис. 8.6, а. Тому для підтримки незмінним значення критичного моменту напруга повинна знижуватися меншою мірою, ніж це виходить з (8.7) при Мс const. Для цього в частотному
приводі використовують додатній зворотний зв’язок з |
IR компенсацію, при |
|
якій співвідношення між |
напругою і частотою |
визначається виразом |
U1 I1R1 / f1 const E1 / f1 |
const . При цьому 1 const. |
|
Перетворювачі частоти, що випускаються, часто передбачають можливість зміни співвідношення між напругою та частотою, з метою забезпечення зазначених трьох законів керування. Спрощена схема приводу, що реалізує розглянуті закони керування, наведена на рис. 8.7. Функціональний перетворювач реалізує необхідне співвідношення між напругою та частотою згідно з (8.7). Перетворювач частоти містить у собі автономний інвертор напруги АІН і систему керування (СК). Задавач інтенсивності (ЗІ) забезпечує заданий темп зміни швидкості в пускогальмівних режимах. Суттєво, що в цьому випадку (повільна зміна напруги живлення) відсутні різкі піки моменту двигуна, що спостерігаються при прямому пуску.
Недоліками розглянутого типу приводу є: низька якість регулювання швидкості як за керуючої, так і за збурюючої дії; відсутність режиму роботи на упор, тобто при надмірних моментах навантаження привід вимикається під дією струмого захисту; важко реалізувати керування потокозчепленням у функції моменту двигуна.
Для реалізації більш складних законів керування використовуються замкнені системи регулювання з різними зворотними зв’язками.
Скалярні закони керування значно спрощуються, якщо здійснювати регулювання струму статора, а не напруги. Амплітуда струму статора визначається моментом (ковзанням) двигуна і не залежить від частоти. Щоб безпосередньо керувати амплітудою струму статора, перетворювач частоти повинен мати властивості джерела струму. Тому на практиці часто