

Лекційна робота №3
ХАРАКТЕР ДІЮЧИХ СИЛ І МОМЕНТІВ
Момент навантаження на валу робочої машини, або так званий момент опору руху, створюється різноманітними силами, що мають різну фізичну
природу. Умовно їх можна вважати або корисними або шкідливими опорами.
Корисними силами опору руху вважаються ті сили, для подолання яких призначена саме ця робоча машина. Наприклад, це зусилля різання в металорізальних верстатах, сили деформації при формоутворенні, сила ваги
вантажу в різноманітних підйомних механізмах.
Шкідливі сили опору руху обумовлені різноманітними видами втрат, що виникають при русі. В основному це втрати, створені силами тертя (у
підшипниках, зубчатих колесах у редукторі, у направляючих верстата, тощо).
Урахування розміру втрат провадиться за допомогою розрахункових або емпіричних коефіцієнтів опору прямуванню або за допомогою коефіцієнта корисної дії (ККД), якщо неможливе більш точне і детальне урахування.
Корисні і шкідливі сили залежать від конструкції робочої машини й
особливостей технологічного процесу.
І корисні і шкідливі сили опору створюють моменти статичного опору
M c |
руху на осі робочої машини. Ці моменти опору класифікуються за |
характером сил опору або за конструкцією робочої машини й особливостями технологічного процесу. За характером всі моменти статичного опору поділяються на дві групи: реактивні та активні моменти.
Реактивні моменти опору – це моменти, що утворені силами тертя,
силами різання, шліфування, або силами пластичної деформації – ковки,
штампування, обжимання, витягування.
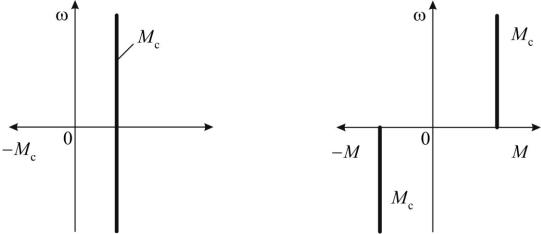
Ці моменти опору створюються силами реакції (звідси назва) при взаємодії матеріальних тіл і завжди спрямовані проти напряму руху. При зміні знаку напряму руху знак моменту опору також змінюється. При швидкості, що дорівнює нулеві, реактивний момент також дорівнює нулеві. Графічне
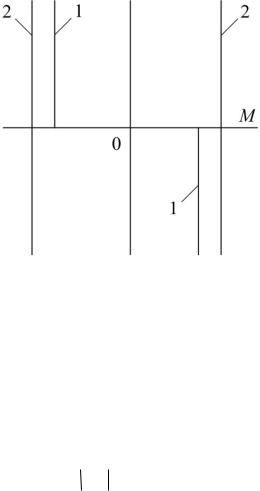
зображення моменту і M
механічної характеристики механізму з реактивним характером c const, наведене на рис. 3.1, графік 1.
Рисунок 3.1 – Механічні характеристики механізмів: 1) – реактивного характеру; 2) – активного характеру
Функція
виразом
M |
c |
f |
|
|
при
0
має розрив і може бути описана логічним
M |
c |
M |
c |
sign |
|
|
|
(3.1)
Функція
sign
дорівнює 1, коли
0;
; дорівнює -1, коли
0;
та
нулеві, якщо 0.
Механічна характеристика такого виду відповідає формі типової нелінійності, що має назву «сухе тертя». Якщо момент двигуна буде менший за момент механізму, електропривод буде нерухомий. Для початку руху механізму із таким моментом електроприводу треба подолати так званий момент торкання з місця.
Механізм з реактивним характером моменту на валу може тільки вживати механічну енергію і ніколи не може її віддати, оскільки вся вона розсіюється в оточуючому просторі у вигляді теплової енергії.
За цією властивістю реактивний момент точніше було б називати неактивним моментом. Активні моменти опору – це моменти, утворювані силою ваги або силами пружних деформацій (стиск, скручування, розтяг),
силою вітру. Характерними прикладами моментів активного характеру є моменти опору, що виникають при деформації пружини, або при підйомі вантажу. Моменти опору активного характеру називаються також потенційними, тому що їх дія пов’язана із зміною потенційної енергії механізму. Активні моменти опору можуть співпадати з напрямом руху або діяти проти, тобто можуть бути позитивними або негативними. При зміні напрямку руху знак активного моменту не змінюється, рис. 3.1, графіки 2.
Класичним прикладом є момент на барабані вантажопідйомного механізму – лебідки. Його напрям не залежить від напряму руху вантажу, оскільки він створюється силами гравітації, які мають одне направлення. Механізм з активним характером моменту на осі може споживати механічну енергію і може її віддавати. Так, при підйомі вантажу механічна енергія передається від двигуна до механізму. При спуску вантажу механічна потенційна енергія передається в зворотному напрямі – від механізму до двигуна. Прикладом механізму із активним моментом навантаження є візок, яких рухається у гору
( M c 0, |
ліва характеристика 2), або спускається з гори |
( M c 0, |
, права |
характеристика 2). |
|
|
|
Моменти навантаження також можуть бути періодичними і залежати від
кута повороту механізму, або бути випадковими у часі.
Періодичні моменти, що залежать від кута повороту механізму характерні для поршневих, кривошипно-шатунних механізмів та для промислових роботів
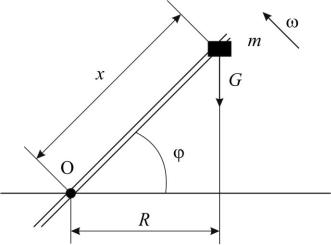
і маніпуляторів. На рис. 3.2 зображена ланка промислового робота. Маса m
ланки обертається проти стрілки годинника навкруги осі О у вертикальній площині на відстані x від цієї осі. Сила ваги та момент сили ваги відносно осі
О
G mg; M c GR |
(3.2) |
або
M |
c |
G cos |
|
|
Рисунок 3.2 – Схема ланки промислового робота
(3.3)
Враховуючи в загальному випадку статичний момент опору
|
нач |
t |
|
|
маємо періодичний
M |
c |
G cos |
нач |
t |
|
|
|
(3.4)
Періодичну форму моменту мають поршневі компресори або насоси,
причому частота пульсацій моменту залежить від кількості поршнів.
Вітрове навантаження на антену або баштовий кран теж залежить від кута повороту, але, крім цього, має випадковий характер. Момент опору транспортного засобу може залежати від пройденого шляху (рельєфу місцевості) і теж може розглядатися як випадковий.
ОСНОВНІ ПОЛОЖЕННЯ МЕХАНІКИ ЕЛЕКТРОПРИВОДА
Основним видом сучасного промислового електроприводу є індивідуальний (однодвигунний) привод, тому питання механіки електропривода будуть розглядатися для однодвигунного ЕП.
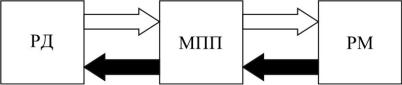
Відповідно до визначення до складу механічної частини ЕП (рис. 3.3)
входять:
1 – рухома частина електричного двигуна – ротор двигуна (РД), 2 –
механічний перетворювальний пристрій (МПП), 3 – робоча машина (РМ) або робочий орган. У загальному випадку кількість складових частин МПП може бути різною, а в тих випадках, коли робочий орган повинний рухатися поступально, до складу механічної частини приводу входять механічні перетворювачі, що перетворять обертальний рух в поступальний.
Рисунок 3.3 – Кінематична схема механічної частини ЕП
У деяких випадках кінематичне схема може бути значно простішою. У
ньому можуть бути відсутні або передача, або механічні перетворювальні механізми, або і ті, і інші, разом.
Іноді вал електродвигуна безпосередньо з’єднується з робочим органом,
або ЕД об’єднується з робочим механізмом в одне ціле.
Як передачі найчастіше застосовують зубчаті, клиноремінні передачі,
різноманітні коробки передач або карданний вал; рідше – ланцюгові або черв'ячні передачі.
У випадках, коли робочий орган повинний рухатися зворотно-
поступально застосовують різноманітні перетворювальні механізми: барабан і трос; зубчато-рейковий перетворювач, кривошипний механізм, гвинт із гайкою,
шарнірно-важільний механізм і т.п.
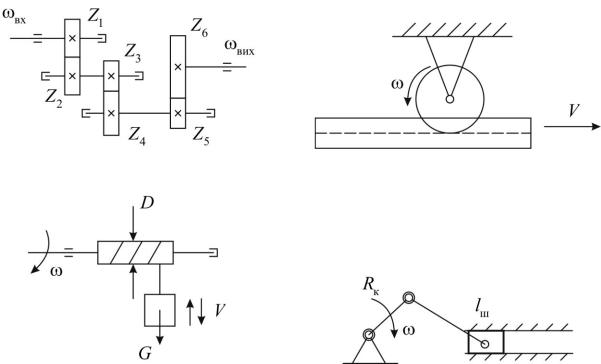
Приклади механічних передач наведені на рис. 3.4, де:
а) редуктор (зубчата передача);
б) зубчато-рейковий механізм;
в) барабан-канат;
г) кривошипно-шатунний механізм.
а) |
б) |
в) г)
Рисунок 3.4 – Механічні передачі в електроприводі
У загальному випадку, механічна частина ЕП – це декілька елементів, на які впливають зусилля або обертаючі моменти, що здійснюють різноманітні види рухів.
Рух окремих мас може бути описаний за допомогою просторових координат і їх похідних (наприклад, процес прямолінійного руху тіла може бути описаний за допомогою 2-го закону Ньютона).
Моменти і зусилля, що створюються механічною частиною приводу,
можна розділити на двигуні або рушійні моменти і гальмівні або моменти опору. Рушійний (обертаючий) момент створюється двигуном (це момент на валу ротора). Момент опору (момент статичний, або момент навантаження)
створюється робочим технологічним навантаженням. Статичний момент складається з двох складових: зумовлених технологічним навантаженням і силами тертя.
За своїм характером статичні моменти діляться на активні і реактивні.
Реактивний момент опору з`являється тільки внаслідок руху – це реакція механічної ланки ЕП на рух. Реактивний момент створюється силами реакції
середовища на рухоме тіло. Прикладом реактивного моменту є момент тертя.
Реактивний момент завжди направлений проти руху (тобто має знак,
протилежний знаку швидкості). При зміні напрямку обертання знак реактивного моменту змінюється. Елемент, що створює реактивний момент може бути тільки споживачем енергії.
Активний момент опору з`являється незалежно від руху електропривода і створюється стороннім джерелом механічної енергії (наприклад, вагою вантажу, що піднімається або опускається; силою вітру, і т.д.). Напрямок активного моменту не залежить від напрямку обертання, тобто знак активного моменту не пов'язаний із знаком кутової швидкості. При зміні напрямку обертання знак активного моменту не змінюється. Джерело активного моменту може, як споживати, так і віддавати енергію.
На рис. 3.5 наведені графіки активного і реактивного моментів.
а) б)
Рисунок 3.5 – Графіки моментів опору:
а) – активний момент опору; б) – реактивний момент опору