

Лекційна робота №1
ЕЛЕКТРОПРИВОД ТА ЙОГО ОСНОВНІ ЕЛЕМЕНТИ. ФУНКЦІЇ ЕЛЕМЕНТІВ ЕЛЕКТРОПРИВОДА
Електроприводом (ЕП) називається електромеханічна система, що складається із взаємодіючих перетворювачів електричної енергії, електромеханічних та механічних передаточних пристроїв, керуючих та інформаційних пристроїв, і призначена для приведення в рух виконавчих органів робочої машини та керування цим рухом у відповідності до вимог технологічного процесу.
Для виконання зазначених функцій електропривод споживає електричну енергію з мережі або перетворювача електричної енергії та перетворює її в механічну, яка передається виконавчим органам робочої машини. За рахунок цієї енергії виконавчий орган приводиться в рух, забезпечуючи виконання технологічного процесу за потрібним законом (переміщення вантажів у підйомно-транспортних механізмах, механічну обробку деталей на верстатах, подачу повітря або води та ін.).
У процесі роботи ЕП можливий і зворотний потік енергії, коли електродвигун перетворює механічну енергію, що надходить від робочої машини, в електричну та повертає її до мережі. При цьому необхідний закон руху виконавчого органу забезпечується за рахунок механічної енергії, яка накопичується в рухомих елементах робочої машини.
Спрощена функціональна схема автоматизованого електроприводу наведена на рис. 1.
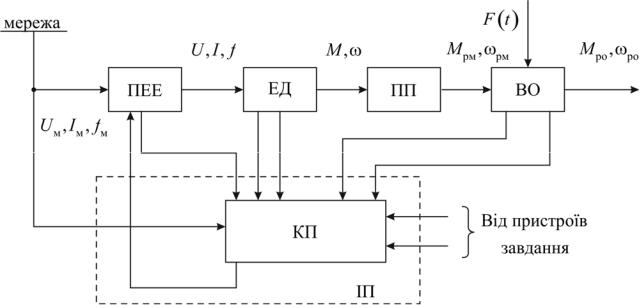
Рисунок 1 – Спрощена функціональна схема автоматизованого електропривода
На рис. 1 позначено:
–ПЕЕ – перетворювач електричної енергії, призначений для перетворювання та регулювання параметрів або показників якості електричної енергії, що надходить з електричної мережі. ПЕЕ керує потоками енергії та виконує двосторонній обмін енергією між мережею та електродвигуном з метою регулювання його режимів роботи для реалізації необхідного технологічного процесу конкретної робочої машини. В якості ПЕЕ частіше всього використовуються електромашинні та статичні перетворювачі на цілком керованих напівпровідникових приладах (IGBT, IGСT, GСТ та ін.), що перетворюють змінну напругу промислової частоти в регульовану за величиною постійну напругу (перетворювачі напруги) або знов перетворюють
узмінну, але іншої частоти та величини (перетворювачі частоти);
–ЕД – електричний двигун постійного або змінного струму (асинхронний або синхронний), який є основою будь-якого електроприводу;
–ПП – механічний передаточний пристрій, що слугує для передачі механічної енергії від електродвигуна до виконавчого органу робочої машини, а також для узгодження виду та швидкостей їх руху. Як ПП можуть використовуватися різні види передач: редукторні, планетарні, ремінні, ланцюгові, пара гвинт-гайка, кривошипно-шатунні та ін. У ряді випадків ПП
відсутній і електродвигун безпосередньо з’єднується з виконавчим органом робочої машини;
–ВО – виконавчий орган робочої машини (або робочий орган) слугує для виконання корисної роботи. Прикладами є: кабіна ліфта, ківш екскаватора, шліфувальний круг або фреза металообробного верстату, валки прокатного стану, стрічка (ланцюг) транспортера або конвеєру та ін. Рухома частина електродвигуна (якір, ротор), ПП та ВО утворюють механічну частину;
–КП – керуючий пристрій призначений для формування керуючих впливів з метою керування процесом перетворювання та циркуляції енергії. Керуючий вплив виробляється на основі інформації про задані режими роботи (сигнали завдання), а також сигналів різноманітних зворотних зв’язків (виробляються спеціальними датчиками), що містять інформацію про поточний стан системи, протікання технологічного процесу та реальні параметри механічного руху електродвигуна або ВО. Використання цієї інформації дозволяє регулювати потрібні закони руху ЕД та ВО, досягати оптимальних режимів роботи виробничих механізмів, забезпечити різні види захисту та блокування при роботі електроприводу;
–ІП – інформаційний пристрій, призначений для отримання, перетворювання, обробки, зберігання та видачі інформації про стан електропривода та технологічного процесу з метою керування електроприводом та технологічним процесом.
Проаналізуємо докладніше силовий (енергетичний) канал електропривода
Будемо вважати, що потужність Р передається від мережі Р1 до робочого органу Р2 , а процес керування, передачі та перетворення потужності супроводжується втратами Р у кожному елементі силового каналу.
Функція перетворювача електричної енергії ПЕ полягає в перетворенні енергії джерела живлення, що характеризується напругою Uc і струмом Ic мережі, в електричну енергію, необхідну двигуну, який характеризується іншими величинами U, I. Перетворювачі ПЕ бувають некерованими (трансформатор, випрямляч, параметричне джерело струму) або
керованими (мотор-генератор, керований випрямляч, перетворювач частоти). Вони можуть мати однобічну (випрямляч) або двобічну провідність (моторгенератор, керований випрямляч із двома комплектами вентилів). У випадку однобічної провідності перетворювача, при зворотному (від навантаження) потоці енергії використовують додатковий резистор R з метою розсіювання гальмівної енергії.
Електромеханічний перетворювач M (двигун або генератор), який завжди присутній в електроприводі, реалізує функцію перетворення електричної енергії U, I у механічну M , і навпаки.
Перетворювач механічної енергії ПМ змінює параметри механічного руху. Може реалізуватися як редуктор, пара гвинт-гайка, система блоків, кривошипношатунний механізм тощо, які узгоджують момент M і швидкістьдвигуна з моментом Mм (зусиллям Fм) і швидкістю м робочого органу технологічної машини.
Величини, що характеризують перетворену енергію (напруга, струм, момент або сила, швидкість) називають координатами електропривода.
Основна функція електропривода полягає в керуванні координатами, тобто в їх примусовій спрямованій зміні відповідно до вимог технологічного процесу.
Керування координатами має здійснюватися в межах, дозволених конструкцією елементів електропривода, тим самим забезпечивши надійність роботи системи. Ці припустимі обмеження пов’язані з номінальними значеннями координат, що визначені виробником обладнання та забезпечують найкраще його використання.
У правильно організованій системі при керуванні координатами (потоком енергії) повинні мінімізуватися втрати P в усіх елементах, і до робочого органу має підводитись необхідна у даний момент потужність.
Властивості і характеристики різноманітних електроприводів розглядаються так, щоб відповісти на наступні питання:
– Як правильно керувати координатами в сталих (статичних) і перехідних (динамічних) режимах?
–Як оцінювати енергетичні властивості об’єкта?
–Як правильно проектувати електропривод?
Вважається, що сучасні технічні засоби зможуть забезпечити будь-які потрібні методи керування. Головна увага приділяється тому, що повинна робити система керування електропривода, а не тому, як це може бути практично здійснено.
Варто враховувати, що об’єкт вивчення доволі складний. Він включає досить різнорідні елементи – електричні, електронні, електромеханічні, механічні, які повинні управляти непростими процесами.
Очевидно, що ефект при вивченні предмета - розуміння основних явищ та вміння вирішувати прості, але важливі для практики завдання – може бути отриманий лише при виконанні низки умов:
1.Треба навчитися працювати з моделями реальних об’єктів, тобто побудованих зі штучних простих об’єктів, що відтворюють ті властивості реального об’єкта, які досліджуються.
2.Ці моделі не повинні бути надлишковими або занадто примітивними. Слід чітко домовитись про умови, при яких отримана та або інша модель. Якщо цього не зробити, результати можуть просто не мати сенсу.
3.Треба вміти виділяти головне і відкидати другорядне. Саме глибоке розуміння основних принципів, головних співвідношень, закономірностей і вміння застосовувати їх на практиці і є основна мета дисципліни «Теорія електропривода».