


Лабораторна робота №3
Оптимізація та імітаційне дослідження в Simulink контуру потоку
Розрахунок параметрів регулятора швидкості за ідеального джерела струму
Структурна схема контуру швидкості показана на рисунку 1.

Рисунок 1 – Структурна схема контуру швидкості
Схема включає:
контур струму з регулятором струму Current PI Controller, передавальною функцією інвертора Transfer Fcn Invertor, вузлом уведення збурень Sum, ланцюгом струму Transfer Fcn Current і ланцюгом зворотного зв'язку за струмом;
контур швидкості з регулятором швидкості Speed PI Controller, схемою формування моменту Te (блок Flux, блок множення Product, підсилювач Gain Te), двигуном (Integrator і підсилювачем 1/J).
Контур струму було оптимізовано, з урахуванням цього розрахункова схема контуру швидкості набула вигляду, показаного на рисунку 2.
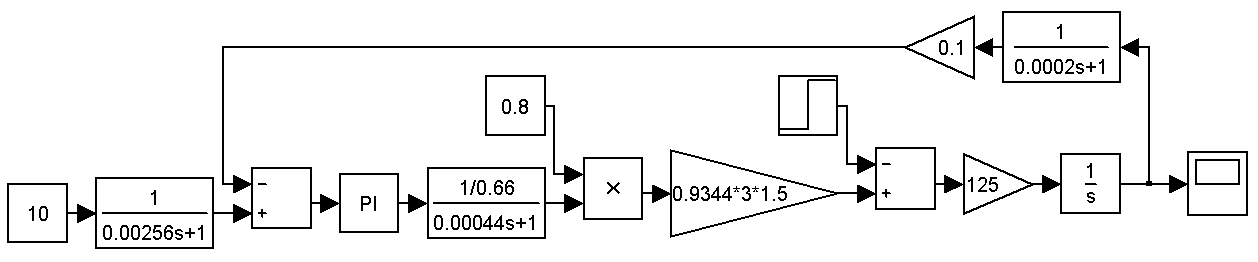
Рисунок 2 – Розрахункова схема контуру швидкості
Контур містить еквівалентний підлеглий контур струму з передавальною функцією:

де TC = ak ∙ Tμ1 = 0,00044 с – еквівалентна постійна контуру струму.
Магнітний потік представлений номінальним значенням 0,8 Вб.
Коефіцієнт посилення блока моменту:
 .
.
Максимальний момент двигуна:
 Нм
Нм
Передавальна функція фільтра Filtr32:
 ,
,
де Tf32 = 0,0002 с – постійна часу фільтра, яка відповідає періоду опитування даних про частоту обертання 400 мкс.
Двигун представлений інтегрувальною ланкою з постійною часу TInt = 1 с і коефіцієнтом посилення
 .
.
Коефіцієнт зворотного зв'язку за швидкістю був обчислений раніше і дорівнює:
 .
.
Розрахунок параметрів регулятора швидкості проведемо за симетричним оптимумом. Усі необхідні умови виконано.
Рекомендується застосування пропорційно-інтегрального регулятора з передавальною функцією виду:
 ,
,
де
 ;
;
Tμ3 = TC + Tf32 = 0,00044 + 0,0002 = 0,00064 с – мала постійна часу контуру швидкості;
Tиз = ak ∙ bk ∙ Tμ3 = 2 ∙ 2 ∙ 0,00064 = 0,00256 с – еквівалентна постійна часу оптимізованого контуру швидкості, час ізодрому регулятора;
aк = bk = 2 – коефіцієнт оптимізації.
Перехідні процеси в оптимізованому за симетричним оптимумом контурі характеризуються великим перерегулюванням і коливанням, причиною яких є форсувальна ланка в чисельнику передавальної функції регулятора. Компенсація форсувального ефекту досягається встановленням у каналі завдання інерційної ланки (фільтра) Filtr31 з передавальною функцією
 .
.
Таким чином, розрахувавши всі параметри контуру швидкості, розробимо модель у Simulink.
Модель реалізовано на елементах бібліотеки Simulink, за винятком регулятора швидкості Speed PI Controller, схему моделі якого відкривають за командою Look Under Mask.

Рисунок 3 – Вікно введення параметрів ПІ-регулятора швидкості
Параметри регулятора вносяться через діалогове вікно, що відкривається при подвійному клацанні по зображенню регулятора (рисунок 3).
Блок Speed задає частоту обертання ротора. Частота обертання задається у вигляді напруги. Для встановлених параметрів задавальній напрузі в 10 В відповідає частота обертання ротора 100 1/с.
На рисунку 4 представлено модель контуру, повтореного двічі.
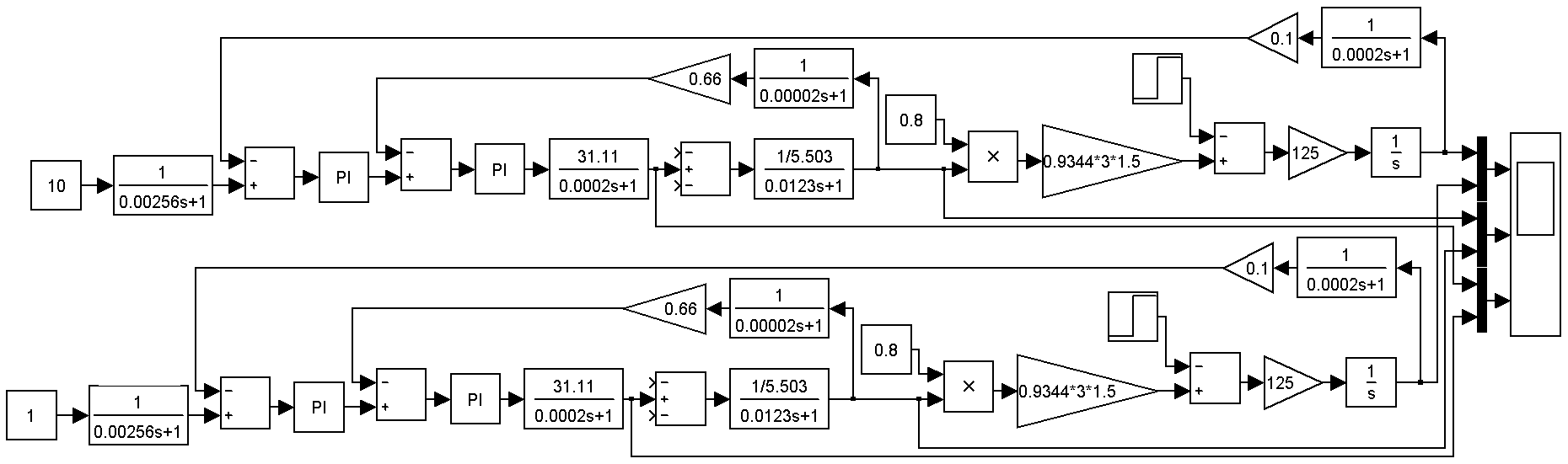
Рисунок 4 – Схема моделі оптимізованого контуру швидкості з ідеальним джерелом струму
Це зроблено для побудови кривих перехідного режиму для двох різних значень задавальної напруги. Нагадаємо, що на регулятор швидкості не накладено обмежень, джерело струму (інвертор) ідеальне, тому має формуватися оптимальний режим керування (див. рисунок 5).
Дослідження проведено для двох задавальних напруг: 10 і 1 В. Показники перехідних процесів близькі до оптимального, відповідні розрахунки можна виконати. Звернемо увагу на реакцію джерела струму (інвертора) під час здійснення оптимального керування. Нагадаємо, що під час розрахунку параметрів регулятора швидкості було прийнято допущення про ідеальність джерела струму. Що це означає?
Під час керування у «великому» (подача на вхід 10 В) двигун запускається з оптимальними параметрами на частоту обертання 100 1/с. Для цього має джерело струму створити в часі максимальну напругу 4689 В і струм у навантаженні 86,48 А. Насправді максимальна вихідна напруга інвертора 311,1 В і граничний струм статора 15,13 А. Отже, реально під час керування у «великому» оптимальної швидкодії не досягти.

Рисунок 5 – Оптимізований перехідний процес у контурі швидкості під час керування за входом 10 і 1 В
Під час подавання на вхід задавальної напруги 1 В ситуація з вихідними параметрами джерела струму ближча до реальної (див. криві перехідного режиму червоного кольору на рисунку 5), і справді параметри перехідного режиму наближаються до оптимальних.
У моделі на рисунку 4 пуск виконують без навантаження, у момент часу 0,03 с до валу двигуна прикладають момент опору номінального значення. Провал швидкості на 1,1 1/с повністю усувається за час, менший за 0,005 с. Пропорційно-інтегральний регулятор швидкості виконав своє призначення.