

Лекційна робота №2
ПЕРЕХІДНІ ПРОЦЕСИ ПРИ ГАЛЬМУВАННІ ПРОТИВМИКАННЯМ
Розглянемо спочатку перехідні процеси при гальмуванні
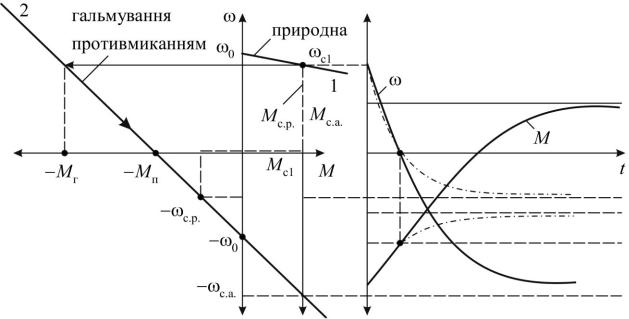
противмиканням, шляхом зміни полярності прикладеної напруги або чергування фаз асинхронного двигуна при активному моменті опору. Механічні характеристики, що відповідають цьому режиму, наведені на рис. 2.1.
Нехай перед початком гальмування двигун працює на природній характеристиці зі швидкістю с1 і був навантажений активним моментом опору. Для того, щоб скористатися рівняннями (9) та (11), з першої лекції, для
розрахунку перехідних процесів, варто визначити початкові та кінцеві
(усталені) значення змінних, а також сталу часу Тм . При цьому потрібно мати на увазі, що при зменшенні швидкості до нуля під дією сумарного моменту двигуна та активного моменту навантаження починається розгін у зворотному напрямку. Потім при 0 під дією активного моменту навантаження двигун переходить у генераторний режим і лише при швидкості cа (рис. 2.1)
настає усталений рух.
Початкове значення швидкості згідно з механічними характеристиками рис. 2.1 дорівнює усталеній швидкості в попередньому рушійному режимі
поч с1. |
При визначенні початкового значення гальмівного моменту варто |
виходити з того, що в розглянутій задачі зневажають електромагнітною інерційністю електричних кіл, тому струм, а отже, і момент двигуна змінюються стрибком при зміні полярності прикладеної напруги. Тобто при
переході з характеристики 1 на характеристику 2 (рис. 2.1) |
М поч М г . |
|
У ролі кінцевих (усталених) значень змінних і |
М |
при користуванні |
рівняннями (9) і (11), з першої лекції, необхідно завжди брати координати точки перетину механічної характеристики двигуна і характеристики активного моменту опору М с.акт . Це зумовлено тим, що зазначені рівняння отримані для електроприводу з лінійними характеристиками, коли динамічний момент є
також лінійною функцією швидкості, що має місце тільки при активному моменті опору.
а) б)
Рисунок 2.1 – Механічні характеристики та криві перехідного процесу при гальмуванні противмиканням: –––––– активний момент опору;
– – – – реактивний момент опору
Реактивний момент опору при зміні напряму руху стрибком змінює знак,
тому динамічний момент зазнає зміни також стрибком і не є лінійною функцією
швидкості.
Таким чином, для розглянутого режиму гальмування маємо відповідно до
рис. 2.1, а: М с М с1; с с.а..
З урахуванням зазначених початкових та кінцевих значень змінних
рівняння моменту (9) і швидкості (11) можна подати у вигляді
|
|
|
|
|
t |
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
М М |
|
1 |
еTм.г |
М |
еTм.г |
|
; |
|
||||||
|
с1 |
|
|
|
|
|
|
г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.1) |
|
|
|
|
|
t |
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
Tм.г |
|
|
|||
|
|
|
|
|
Tм.г |
с1е |
|
. |
|
|||||
с.а 1 е |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||

Графіки перехідних процесів, що відповідають наведеним рівнянням,
показані на рис. 2.1, б.
Для розрахунку часу гальмування необхідно в перший вираз (2.1)
підставити |
t tг , при |
цьому згідно з рис. 2.1, а момент двигуна дорівнює |
пусковому |
М М п. |
Підставляючи ці значення в перший вираз (2.1), |
одержимо після перетворення формулу для визначення тривалості перехідного процесу при гальмуванні противмиканням.
t |
|
Т |
|
ln |
M |
г |
М |
с |
, |
|
|
|
|
||||||
п.г. |
м.г |
M |
|
М |
|
||||
|
|
|
|
|
|
||||
|
|
|
|
|
п |
с |
|
||
|
|
|
|
|
|
|
|
(2.2)
де
Т |
|
|
J |
|
J |
|
|
J |
|
|
|
|
|
|
|
c1 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
м.г |
|
|
|
M |
|
M |
|
М |
|
|
|
|
|
|
г |
п |
||||
|
|
|
|
|
|
|
|
|
||
– електромеханічна постійна часу, знайдена
з урахуванням позначень рис. 2.1 (абсолютні значення M г та M п ).
Як відомо, реактивний момент опору при переході швидкості через нуль
стрибком змінює знак. Тому отримані вирази (2.1) придатні для розрахунку
перехідних процесів при реактивному моменті тільки |
до зупинки приводу |
0. Отже, до зупинки двигуна при реактивному M c |
процес гальмування |
протікає подібно до того, як і при активному моменті опору (штрихові лінії рис. 2.1). При розгоні у зворотному напрямку потрібно знайти нові початкові та кінцеві значення моменту та швидкості й підставити їх у вихідні рівняння (9) і
(11), з першої лекції.
Згідно з рис. 2.1 маємо для реактивного моменту опору при розгоні в зворотному напрямку: Mпоч M п , M с M с1, поч 0, с с.р..
З урахуванням цих значень одержимо з (9) і (11), з першої лекції, вираз для моменту і швидкості при розгоні двигуна в зворотному напрямку і реактивному моменті опору:
|
|
|
|
|
t |
|
|
|
|
t |
|
М М |
|
|
1 е |
T |
|
М |
|
е |
T |
; |
|
|
с1 |
|
|
м.г |
|
п |
|
м.г |
|
||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
1 е |
T |
|
. |
|
|
|
|
||
с.р |
|
|
м.г |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
(2.3)
Графіки перехідного процесу, що відповідають наведеним виразам,
показані на рис. 2.1 пунктирними лініями.
РЕОСТАТНЕ РЕГУЛЮВАННЯ ШВИДКОСТІ, СТРУМУ ТА МОМЕНТУ ДВИГУНА ПОСТІЙНОГО СТРУМУ НЕЗАЛЕЖНОГО ЗБУДЖЕННЯ
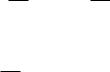
Схема вмикання та механічні характеристики двигуна при регулюванні швидкості зміною додаткового опору наведені на рис. 2.2. Зі зростанням
додаткового |
опору |
|
|
збільшується |
падіння |
(перепад) |
швидкості |
M rя Rд / кФ |
2 |
, |
а також нахил характеристики і вони стають більш |
||||
|
|||||||
м’якими. Тому при заданому моменті опору при поступовому збільшенні Rд
швидкість зменшується (рис. 2.2, б).
Більш економічним є реостатне регулювання швидкості для приводів з вентиляторним навантаженням, для яких без урахування втрат момент статичного опору пропорційний квадрату швидкості М c c 2.
а) б)
Рисунок 2.2 – Схема вмикання (а) і механічні характеристики (б)
реостатного способу регулювання швидкості
У цьому випадку потужність, споживана з мережі
|
|
|
|
|
2 |
|
|
|
2 |
|
|
||
P M |
P |
|
P |
|
, |
||||||||
|
|
|
|
|
|
|
0 |
||||||
1 |
0 |
1н |
|
|
2н |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
н |
|
|
н |
|
н |
|
||||
(2.4)
де |
1н |
|
P2н |
– відповідно |
потужність, споживана при |
номінальному |
||||
|
P |
, |
|
|
|
|
|
|
|
|
навантаженні, і номінальна потужність на валу двигуна (рис. 2.3), |
2 |
|||||||||
с М н / н . |
||||||||||
Потужність на валу двигуна |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
P M P |
. |
(2.5) |
||||
|
|
|
|
|
|
|
||||
|
|
|
|
2 |
2н |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
||
Втрати в якірному колі без урахування втрат у сталі і механічних
|
|
|
|
P |
2 |
|
|||
P2 Р1 Р2 |
|
2н |
|
|
0 н . |
(2.6) |
|||
|
|
||||||||
|
|
|
|
н |
н |
|
|||
Узявши похідну |
d P2 |
|
і прирівнявши її до нуля, знаходимо швидкість, |
||||||
d |
|||||||||
|
|
|
|
|
|
|
|||
при якій втрати енергії в якірному колі досягають мінімуму.
Тобто
|
|
4 |
|
|
|
|
3 |
|
P |
|
P |
. |
|||||
|
|
0 |
|
|||||
2мін |
|
27 |
2н |
|
|
|||
|
|
|
|
|
|
|||
|
|
|
|
н |
|
|||
(2.7)
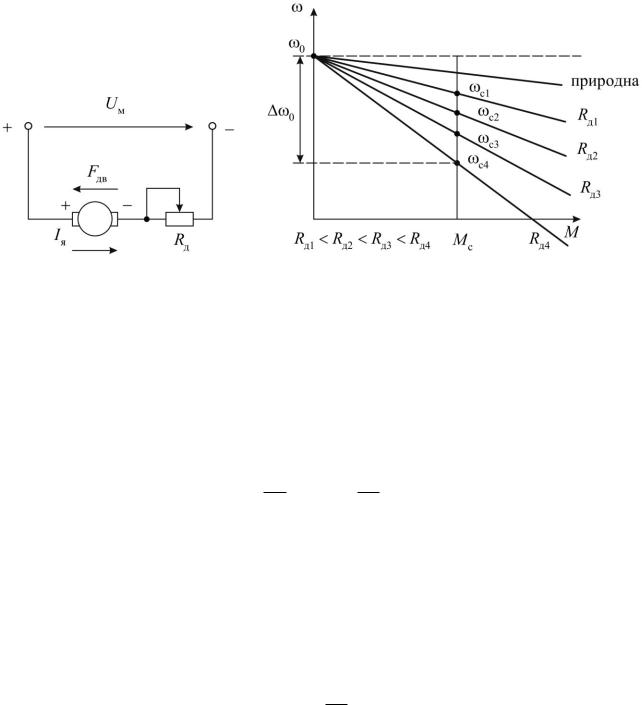
Рисунок 2.3 – До визначення втрат потужності при реостатному
регулюванні швидкості ( Рс |
– потужність, споживана з мережі, пропорційна |
0 ; |
|
|
Рв – потужність на валу) |
|
|
|
Аналіз (2.6) |
показує, що для приводів з вентиляторним навантаженням |
||
при |
0 0 втрати |
потужності дорівнюють нулю, тоді як при |
М с const |
і 0 |
вся споживана потужність втрачається в якірному колі. Штучні характеристики, одержувані увімкненням додаткових опорів, широко використовуються також для обмеження струму і моменту двигуна в перехідних режимах, в яких ці параметри можуть досягати недопустимо
великих значень. Наприклад, |
при пуску двигуна ( 0, Fдв 0 ) струм |
|||||
короткого замикання I |
|
|
Uм |
|
через незначний внутрішній опір якоря (частки |
|
к.з. |
Rя |
|||||
|
|
|
||||
|
|
|
|
|||
або одиниці Ом) перевищує номінальне значення в 10...20 разів, а допустимий струм двигуна загальнопромислового призначення Ідоп 2...2,5 Ін. Для обмеження пускового струму в коло якоря вмикають додаткові опори. Така ж необхідність виникає при реверсі та гальмуванні двигуна постійного струму.