

Лекційна робота №1
МЕХАНІЧНІ ПЕРЕХІДНІ ПРОЦЕСИ ЕЛЕКТРОПРИВОДА З ЛІНІЙНОЮ МЕХАНІЧНОЮ ХАРАКТЕРИСТИКОЮ ТА М с const
До механічних перехідних процесів відносяться ті, в яких враховується тільки механічна інерція системи, а впливом електромагнітної та теплової інерційності нехтують.
Лінійну механічну характеристику мають електроприводи з двигунами постійного струму незалежного збудження, а також, з деяким наближенням,
приводи з асинхронними двигунами з фазним ротором, що працюють на природній або реостатних характеристиках з навантаженням Мс 0,75Мкр.
Вхідними виразами для аналізу перехідних процесів є рівняння руху
М Мс J |
d |
, |
(1) |
|
dt |
||||
|
|
|
та рівняння механічної характеристики, наприклад, двигуна постійного струму
|
|
M |
c |
r |
R |
|
|
|
|
|
|
я |
|
д |
|
. |
|
|
кФ |
|
|
|||||
0 |
|
|
2 |
|
|
|||
|
|
|
|
|
|
|
||
Якщо продиференціювати (2) і підставити значення
диференційне рівняння моменту двигуна
М М |
|
JR |
dМ |
, |
я |
|
с |
кФ |
2 |
dt |
|
|
d dt
(2)
у (1) отримаємо
(3)
або
де
ТJRя
мкФ 2
Тм рМ М М с ,
–електромеханічна стала часу,
R |
r |
R |
я |
я |
д |
(4)
– сумарний
опір якірного кола; |
p |
d |
– оператор диференціювання. |
|
dt |
||||
|
|
|
Якщо вхідні рівняння розв’язати відносно швидкості, то аналогічне рівняння для швидкості
Т |
м |
р . |
|
|
с |
|
|
Рівняння (4) є лінійним диференційним рівнянням першого |
|||
постійною правою частиною, |
характеристичне рівняння якого |
Тм р |
|
отримаємо
(5)
порядку з
1 0 має
корінь
р |
1 |
. |
|
T |
|||
|
|
||
|
м |
|
Тому розв’язання (4) має вигляд
|
|
|
|
|
|
t |
|
|
|
(6) |
М М |
|
М |
|
Се |
м |
М |
|
|
||
|
|
T |
|
, |
|
|||||
віл |
пр |
|
пр |
|
||||||
|
|
|
|
|
|
|
|
|||
де С – стала інтегрування, що знаходиться з початкових умов; |
|
|||||||||
М віл , М пр – відповідно вільна і вимушена складові перехідного процесу. |
||||||||||
Вимушена (примушена) |
складова |
перехідного процесу (часткове |
||||||||
розв’язання рівняння (4)), що залежить від вигляду правої частини рівняння,
знаходиться з усталеного режиму, коли |
dМ |
0. Для даного випадку усталене |
|
dt |
|||
|
|
(вимушене) значення моменту М пр
t
М СеTм
М с. При цьому (6) набуває вигляду
Мс. |
(7) |
|

Для умови t 0,
визначення сталої інтегрування С використовуються початкові
M M поч. З урахуванням цього одержимо з (6)
М |
поч |
С М |
, |
|
с |
|
звідки
С М |
поч |
М |
. |
|
с |
|
Підставляючи (8) у (7), одержимо вираз для моменту двигуна
|
|
t |
|
|
|
t |
|
М М |
1 е |
T |
М |
|
е |
T |
. |
с |
|
м |
|
поч |
|
м |
|
|
|
|
|
||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
(8)
(9)
Для двигуна постійного поділивши ліву і праву частини
струму
(9) на кФ
момент пропорційний струму, тому
, одержимо вираз для струму якоря
|
|
|
|
|
t |
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
І |
я |
І |
1 |
еTм |
І |
поч |
еTм . |
(10) |
||||
|
|
с |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
t
0,
Аналогічним чином знаходиться розв’язок рівняння (5) і за умови, що припоч , одержимо:
|
|
t |
|
|
t |
|
1 е м |
|
е м . |
||
|
|
T |
|
|
T |
с |
|
поч |
|
||
|
|
|
|
||
|
|
|
|
|
|
(11)
З даних виразів випливає, що момент, струм якоря та швидкість двигуна в перехідних режимах змінюються за одним і тим самим експоненціальним законом. Причому теоретично тривалість перехідного процесу дорівнює
нескінченності. Однак практично можна вважати, що перехідний процес закінчується за час tпер 3 4 Тм . При цьому при t 3Тм поточне значення відрізняється від кінцевого тільки на 5 %, а при t 4Тм – на 2 %.
Наведені вирази (9)...(11) дозволяють розрахувати різні перехідні процеси в електроприводах з двигунами постійного струму (пуск, гальмування, реверс,
накидання та скидання навантаження тощо). При припущенні, що момент двигуна пропорційний ковзанню (робочі ділянки природної та реостатних характеристик асинхронного двигуна), ці вирази можуть бути застосовані і для асинхронного електропривода. Значення електромеханічної сталої часу Тм у
цьому випадку зручно визначати за допомогою відповідної механічної характеристики за формулою
J J
Тм M ,
(12)
де
|
|
|
M |
||
|
– модуль жорсткості відповідної механічної характеристики.
Згідно з (12) маємо для робочої ділянки природної характеристики асинхронного двигуна
Т |
|
|
J |
|
J S |
|
. |
|
|
0 |
н |
||||
|
|
|
|
|
|
||
|
м |
|
M |
|
М |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
н |
|
|
(13)
Для штучної характеристики
Т |
|
|
J |
|
J S |
|
, |
||
|
|
ш |
0 |
н.ш |
|||||
|
|
|
|
|
|
||||
|
м.ш |
|
M |
|
|
М |
|
|
|
|
|
|
ш |
|
н.ш |
|
|||
|
|
|
|
|
|
|
|||
(14)
де Sн.ш |
0 |
н.ш |
– ковзання на штучній характеристиці, що відповідає |
|
0 |
||
|
|
|
швидкості н.ш при номінальному моменті.
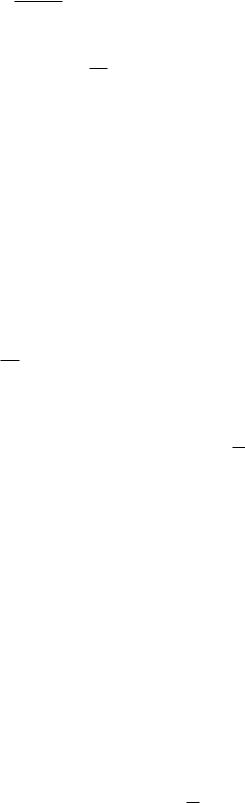
Для аналізу та розрахунку перехідних процесів потрібно знати електромеханічну сталу часу, котра являє собою час, протягом якого швидкість двигуна досягає свого усталеного значення під дією незмінного моменту, що дорівнює пусковому. При цьому (t) є лінійно зростаючою функцією часу і зображується дотичною, проведеною до початкової точки кривої перехідного процесу. Тому відрізок ab (рис. 1) дорівнює сталій часу. Для визначення сталої часу можна проводити дотичну в будь-якій точці кривої.
Рисунок 1 – Графічне визначення сталої часу перехідного процесу
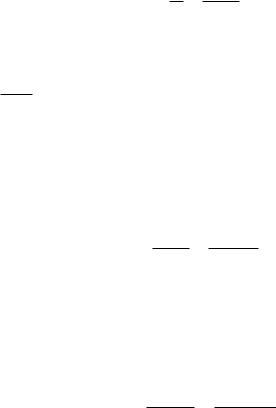
Крім графічного способу сталу часу можна визначити і графоаналітичним
методом. Для цього необхідно знайти значення вихідної величини |
х |
при t T , |
|||
тоді при xпоч 0 одержимо |
|
|
|
|
|
|
х хс 1 е 1 0,63хс , |
|
|
||
t |
|
|
|
|
|
а для експоненти х х е T |
маємо при t T |
x x e 1 |
0,37x . |
|
|
с |
|
c |
c |
|
|
Використовуючи ці значення та криві перехідного процесу, можна знайти сталу часу, як показано на рис. 2.
Рисунок 2 – Графічне визначення сталої часу перехідного процесу
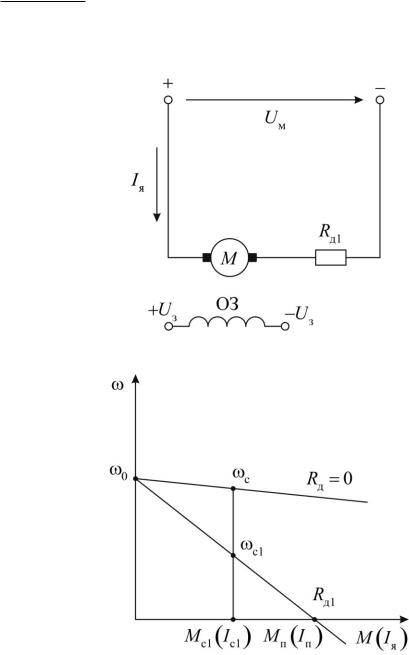
Розглянемо пуск двигуна постійного струму в одну ступінь, схема
вмикання двигуна та механічна характеристика наведені на рис. 3.
Перехідні процеси в цьому випадку описуються наведеними вище рівняннями (9) і (11), в які необхідно лише підставити початкові та кінцеві значення змінних, що відповідають даному режиму. Ці значення можуть бути визначені аналітично за допомогою рівняння механічної характеристики або
графічно на базі механічної характеристики (рис. 3, б). |
|
|||||||||||||
Згідно з рис. 3, б початкові значення змінних: |
Мпоч Мп , поч 0. |
Кінцеві |
||||||||||||
усталені значення с с1, Мс |
Мс1. |
|
|
|
|
|
|
|
|
|||||
З урахуванням цих значень рівняння (9) та (11) набувають вигляду |
|
|||||||||||||
|
|
|
|
|
|
t |
|
|
|
|
t |
|
|
|
М М |
с1 |
1 |
еTм |
М |
п |
еTм |
; |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(15) |
|
|
|
|
t |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
с1 |
1 еTм |
, |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
де
|
J r |
R |
|
|
Тм |
я |
д1 |
|
– електромеханічна стала часу. |
кФ |
|
|||
|
|
2 |
|
|
а)
б)
Рисунок 3 – Схема включення (а) та механічна характеристика (б) при пуску двигуна в одну ступінь
Криві перехідного процесу, що відповідають (15), наведені на рис. 4.
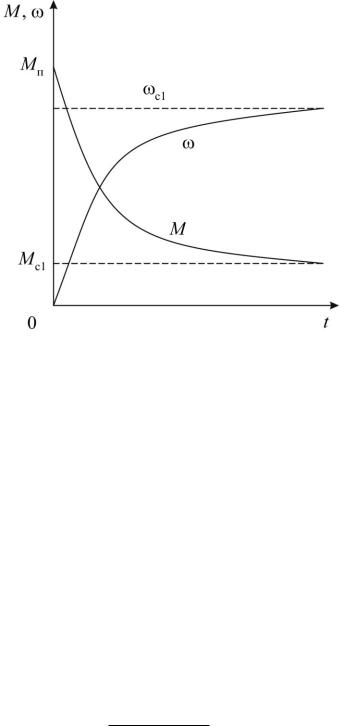
Рисунок 4 – Криві перехідного процесу при пуску двигуна постійного струму в одну ступінь
Для приводу з асинхронним двигуном з фазним ротором початкові та усталені значення змінних визначаються або аналітично за допомогою рівняння механічної характеристики, або графічно за допомогою механічної характеристики (рис. 5).
Електромеханічна стала часу, що відповідає реостатній характеристиці,
визначається за формулою (14), яка з урахуванням позначень, що відповідають рис. 5, має такий вигляд
Тм.ш J 0 н.ш. ,
Мн
(16)
де |
м.ш – швидкість двигуна на реостатній характеристиці при М Мн |
(рис. 5); |
J – сумарний момент інерції системи, зведений до вала двигуна. |
Вид кривих перехідного процесу буде таким же, як і для двигуна постійного струму (рис. 4).
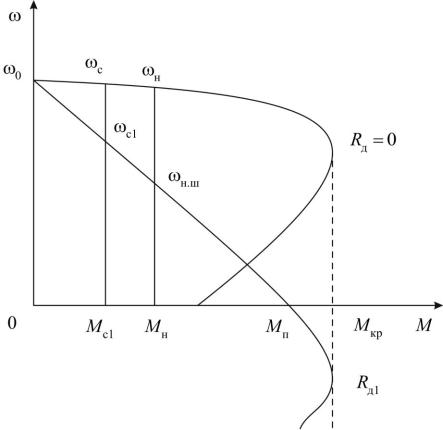
Рисунок 5 – Механічні характеристики асинхронного двигуна з фазним ротором при пуску в одну ступінь
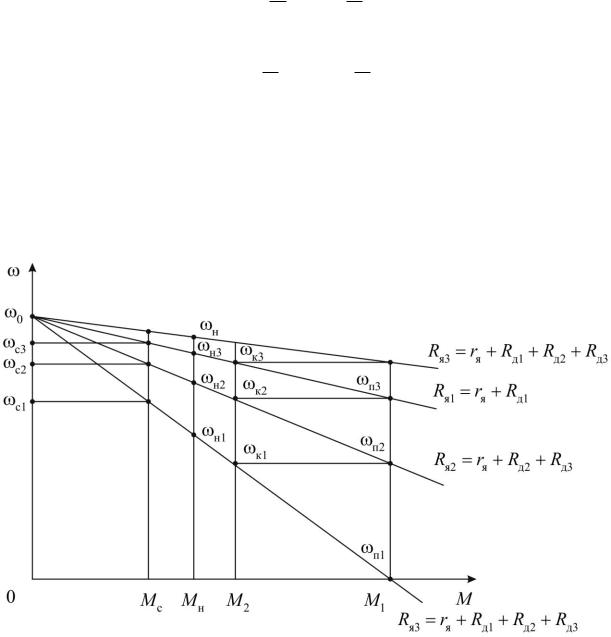
Розглянемо перехідні процеси електроприводу з лінійною механічною характеристикою під час ступінчастого пуску згідно з пусковими характеристиками (рис. 6), які мають двигуни постійного струму незалежного збудження і з певним наближенням є реостатними характеристиками асинхронного двигуна з фазним ротором.
При ступінчастому пуску момент двигуна на кожній ступtні змінюється в заздалегідь обраних межах від пускового моменту M1 до моменту перемикання
M 2. Тому розрахунок перехідних процесів потрібно робити для кожної ступені,
використовуючи раніше отримані вирази (9) та (11), що для і-ї ступені мають вигляд
|
|
|
|
|
|
t |
|
|
t |
|
|
||
М |
|
М |
|
1 е |
T |
|
М е |
T |
|
; |
|||
|
i |
|
с |
|
|
мi |
|
1 |
мi |
|
|
||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
t |
|
||
|
|
|
|
|
|
|
|
||||||
|
1 е |
T |
|
|
|
е |
T |
|
. |
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
i |
|
сi |
|
|
мi |
|
|
поч.i |
|
мi |
|||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
(17)
Для визначення початкових і усталених (кінцевих) значень змінних зручно користуватися пусковими характеристиками (рис. 6)
Рисунок 6 – Механічні характеристики при ступінчастому пуску приводу
злінійною механічною характеристикою
Зурахуванням позначень, прийнятих на рис. 6, маємо для першої ступені
|
|
|
t |
|
|
|
t |
|
|
|
|
|
|
М1е |
|
||
М I М с 1 е |
|
|
|
|
Tм1 |
|||
|
|
|
Tм1 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
||
|
е |
Tм1 |
|
|
|
|||
I с1 1 |
|
|
|
, |
|
|
||
|
|
|
|
|
|
|
|
|
;
(18)