

Лекційна робота №6
ЕЛЕКТРОПРИВОД ПОСТІЙНОГО СТРУМУ З ШИРОТНО-ІМПУЛЬСНИМ ПЕРЕТВОРЮВАЧЕМ
Багато промислових електроприводів (підземний транспорт, тролейбуси, трамваї та ін.) одержують живлення з мережі постійного струму незмінної напруги. Необхідність регулювання швидкості вказаних приводів вимагає перетворення напруги мережі в регульовану напругу, що підводиться до якоря. Такого перетворення енергії потребують багато виробничих механізмів потужністю від декількох ватів до тисячі кіловатів (магістральні електровози).
Іншою галуззю застосування широтно-імпульсних перетворювачів (ШІП) є швидкодійні приводи постійного струму (приводи подач різних верстатів). Застосування в цих приводах керованих випрямлячів (система ТП-Д) не Дозволяє досягти швидкодії, що вимагається, унаслідок значного запізнювання перетворювача через його неповну керованість. Крім того, при збільшені кута керування мають місце значні пульсації струму.
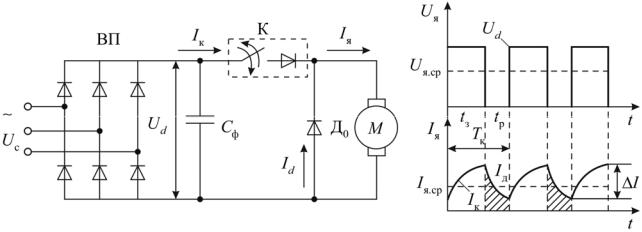
В найпростішому випадку ШІП вміщує джерело постійного струму (випрямляч) з незмінною ЕРС і послідовно включений керований ключ (тиристорний або транзисторний), за допомогою якого двигун з високою частотою вмикається до джерела живлення (рис. 6.1). Для запобігання перенапруги на комутуючому елементі і забезпечення протікання струму через двигун при розімкненому ключі двигун шунтується зворотним діодом Д0.
На інтервалі tз ключ замкнутий, двигун підключається до мережі, а на інтервалі tр – розімкнений і двигун шунтується зворотним діодом Д0, по якому під дією електромагнітної енергії, накопиченої в індуктивності, протікає струм навантаження (заштрихована ділянка на рис. 6.1, б). У результаті цього до двигуна прикладається імпульсна напруга (послідовність однополярних імпульсів прямокутної форми), середнє значення якої змінюється за рахунок зміни співвідношення між tз та tр при Tк const
Uя.ср Ud |
tз |
|
Ud tз Ud , |
(6.1) |
|
tз tр |
|||||
|
Тк |
|
|||
де Тк – період комутації, |
tз /Тк – шпаруватість імпульсів; tз |
– час |
|||
замкненого стану ключа.
Рисунок 6.1 – Схема послідовного імпульсу перетворювача (а) та діаграма напруг і струмів при широтно-імпульсному керуванні (б)
Форма вихідного струму при R L навантаженні складається з ділянок експонент (див. рис. 6.1, б). Звичайно на практиці частота комутації ключів fк 1/Тк для двигунів послідовного збудження (привід транспортних пристроїв) складає 300-600 Гц, а для швидкодійних електроприводів 2-5 кГц. При цьому амплітуда коливань струму І щодо середнього значення буде незначною.
Розрізняють два основні способи керування імпульсним перетворювачем:
– широтно-імпульсне з постійною частотою комутації fк 1/Тк, коли регулюється лише час закритого стану ключа;
– частотно-імпульсне регулювання характеризується тим, що ширина імпульсу (або паузи) залишається сталою tімп const , а частота імпульсів
fімп 1/Тк var. При цьому Uя.ср Ud fімпtімп.
Переважне використання в імпульсних електроприводах одержали ШІП з постійною частотою комутації. Іноді з метою зменшення пульсацій струму у якорі застосовують комбіноване керування.
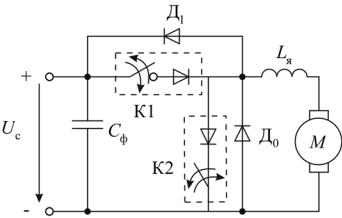
Послідовний перетворювач, схема якого наведена на рис. 6.1, забезпечує регулювання напруги на якорі лише вниз від і дозволяє реалізувати лише рушійний режим роботи. Для реалізації рушійного режиму та генераторного гальмування (двостороння провідність ШІП) застосовують схему, наведену на рис. 6.2, в якій використовуються два ключі: послідовний K1 і паралельний
K 2.
Рисунок 6.2 – Паралельний імпульсний перетворювач з двосторонньою провідністю
У рушійному режимі ключ K 2 є постійно розімкнений. Змінюючи шпаруватість імпульсів за допомогою послідовного ключа K1, реалізується регулювання швидкості двигуна. Для реалізації двостороннього обміну енергії між двигуном і мережею ключ K1 постійно розімкнений, а комутують ключ K 2. При замкненому K 2 струм якоря під дією ЕРС двигуна міняє напрям (динамічне гальмування). Як тільки струм якоря досягає допустимого значення, ключ K 2 розмикають. При цьому під дією ЕРС самоіндукції, наведеною в індуктивності якірного кола, струм якоря через діод Д1 протікає зустрічно напрузі мережі, заряджаючи ємність Сф на вході перетворювача. При цьому реалізується режим генераторного гальмування (напрям струму змінюється, а напруга зберігає свій знак).
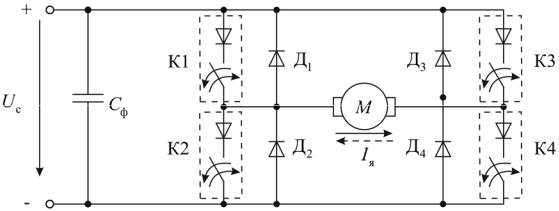
Звичайно в реверсивних приводах використовують чотириквадрантний перетворювач. схема вмикання якого наведена на рис. 6.3. У чотириквадрантному перетворювачі реверсується як напруга на якорі Uя, так і струм якоря Iя. При несиметричному керуванні для одного напряму обертання достатньо, наприклад, постійно тримати замкненим K 4, а комутувати ключ
K1. |
Для іншого напряму обертання – замкнений ключ K3, а комутують ключ |
K 2. |
Нехай в початковому стані замкнені ключі K1 і K 4 (так званий режим |
P2), а потім ключ K1 розмикають (режим P1). При цьому за рахунок ЕРС |
|
самоіндукції струм зберігає свій напрям і замикається через ключ K 4 і діод |
|
Д2. |
Якщо розімкнути обидва ключі K1 і K 4 (режим P0), то струм якоря |
замикається через Д3, Сф, Д2 і заряджає ємність фільтра, але при цьому темп його зміни збільшується.
Рисунок 6.3 – Чотириквадрантний реверсивний ШІП У перетворювачі, що розглядається, можна змінювати полярність напруги
на якорі Uя і напрям струму якоря |
Iя. При |
постійно замкненому K 4 і |
|
розімкненому K3 керування ключами |
K1 і K 2 |
дозволяє реверсувати струм |
|
якоря при позитивній напрузі на якорі Uя1 (рис. 6.3). Навпаки, при |
|||
замкненому K 2 і розімкнутому K1 керування ключами K3 і |
K 4 забезпечує |
||
негативне значення напруги на якорі |
Uя2 і реверс струму |
Ія. Така схема |
|
забезпечує реверс двигуна з рекуперацією енергії, що заряджає ємність фільтра, який є обов’язковим елементом для таких систем.
У режимі безперервного струму рівняння напруг для якірного кола має вигляд
Ud Eдв Ія Rя, |
(6.2) |
звідки, з урахуванням (3.4) і (3.5), рівняння електромеханічної та механічної характеристик
|
|
Ud Ія Rя |
, |
(6.3) |
||
|
кФ |
|||||
|
|
|
|
|||
|
Ud |
|
М R2я . |
(6.4) |
||
|
||||||
|
|
кФ |
кФ |
|
|
|
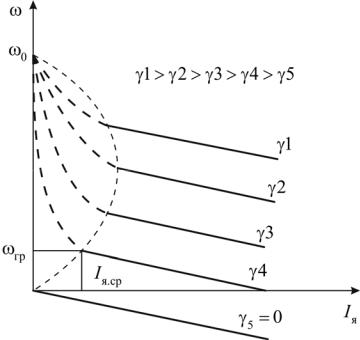
Тобто, змінюючи шпаруватість імпульсів, можна отримати сімейство характеристик, паралельних одна одній (рис. 6.4).
Рисунок 6.4 – Електромеханічні характеристики двигуна в системі ШІП-Д

При 0 напруга на двигун не подається, що відповідає режиму динамічного гальмування.
У режимі переривчастого струму характеристики стають нелінійними. Координати граничного режиму визначаються такими виразами
Iя.гр Iкз |
1 Тк |
, |
|
(6.5) |
||||
|
|
|
|
|
||||
|
|
|
2 Тя |
|
|
|
|
|
|
1 Т |
к |
|
|
||||
гр 0 1 |
|
|
|
, |
(6.6) |
|||
2 Тя |
|
|||||||
|
|
|
|
|||||
де Тя Lя / Rя – стала часу якірного кола; Тк |
– період комутації ключів; |
|||||||
Ікз Ud / Rя – струм короткого замикання; |
Rя |
– сумарний опір якірного кола. |
||||||
Найбільше значення Ія.гр має місце при 0,5 |
|
|
||||||
|
|
|
|
|
|
|
|
|
Ія.гр.макс |
Ікз Тк |
|
. |
|
|
(6.7) |
||
|
|
|
||||||
|
|
8 Тя |
|
|
|
|
||
Пульсації струму якоря І (рис. 6.1, б ) визначаються таким чином
І Iмакс Iмін Iкз |
1 Тк |
. |
(6.8) |
|
|||
|
Тя |
|
|
Пульсуючий струм якоря викликає додаткові втрати в міді та сталі, зумовлені вихровими струмами. Щоб ці втрати не перевищували 10%, період комутації Тк вибирається з умови
Тк 19,2 ІІн 2 Тя,
кз
при цьому допустимий момент зменшується на 5%.
Передаточну функцію ШІП можна уявити у вигляді ланки з чистим запізнюванням
W p |
eшіп р |
Кпре р, |
(6.9) |
|
Uк р |
||||
|
|
|
||
де 1...2 Тк – чисте запізнювання; Кпр |
– коефіцієнт передачі |
|||
перетворювача.
При високій частоті комутації запізнювання можна не ураховувати, вважаючи ШІП безінерційною ланкою. Характеристики та режими роботи двигунів при імпульсному керуванні з високою частотою комутації ключів краще, ніж в системі ТП-Д (фазове керування).
При великій індуктивності в якірному колі струм двигуна при імпульсному регулюванні швидкості можна вважати ідеально згладженим. Тому за відсутності втрат у ключах потужність, споживана з мережі, дорівнює потужності навантаження
Ud Iм Ud Iя; Iм Iя,
де Iм – середнє значення струму джерела живлення (мережі).
Якщо 1, то середнє значення струму мережі менше середнього струму двигуна. Однак, коли ключ замкнений, миттєве значення струму мережі дорівнює миттєвому значенню струму якоря. Тому пікове значення споживаної з мережі потужності велике, а крива споживаного струму з мережі містить гармоніки, що викликають спотворення напруги мережі та додаткові теплові втрати. Для згладжування пульсацій струму мережі на вході ШІП застосовують LC фільтри.
Для керування ШІП використовують звичайно релейні регулятори струму (РРС) з гістерезисом, від ширини петлі якого залежить рівень пульсацій струму якоря. За наявності РРС замкнутий контур струму можна уявити безінерційною

ланкою з передаточною функцією Wc 1/ Kзв.с, де Kзв.с Uк.ном / Iдоп – коефіцієнт зворотного зв’язку за струмом; Uк.ном – номінальна напруга керування.
РЕГУЛЮВАННЯ КООРДИНАТ ДВИГУНІВ З КОРОТКОЗАМКНЕНИМ РОТОРОМ
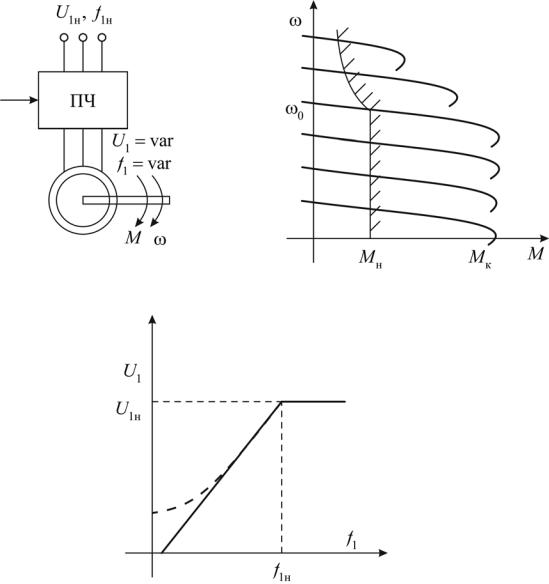
Двигуни з короткозамкненим ротором – найпоширеніші електричні машини. Донедавна вони використовувались лише в нерегульованому електроприводі, оскільки практично єдина можливість ефективно регулювати швидкість - змінювати частоту напруги, що прикладена до статорних обмоток, а це було важко реалізувати технічно. Зараз, завдяки успіхам електроніки, ситуація кардинально змінилася, і частотно-регульований електропривод (рис. 6.5, а) став основним типом регульованого електропривода.
Частотне регулювання. Виходить, що 0 пропорційна частоті f1 і не залежить від жодних інших величин. Разом з тим, змінюючи f1, варто потурбуватися про амплітуду напруги: при зменшенні f1 для збереження магнітного потоку на деякому, наприклад, варто змінювати E1 U1 так, аби
U1 U1н const. f1 f1н
Зі збільшенням частоти вище номінальної при E1 U1, потік буде зменшуватися.
Не враховуючи R1, тобто в припущенні, що E1 U1, критичний момент також пропорційний U1 / f1, тоді як критичне ковзання обернено пропорційно f1.
Механічні характеристики при частотному регулюванні в припущенні, що E1 U1, показана на рис. 6.5, б.
а) |
б) |
в)
Рисунок 6.5 – Схема частотно-регульованого електропривода (а), механічні характеристики (б), залежність напруги від частоти (в)
Опір кола статора, який ми не враховуємо, впливає на характеристики малих машин (кіловати) – пунктир на рис. 6.5, б, оскільки при зниженні частоти E1 U1. Для компенсації цього впливу зазвичай трохи збільшують напругу при низьких частотах (пунктир на рис. 6.5, в).
Проведемо оцінку частотного регулювання швидкості за введеними
раніше показниками: |
|
|
|
|
|
|
|
1. Регулювання |
двозонне |
– |
вниз |
U1 / |
f1 const |
і |
вгору |
U1 U1н, f1 f1н від основної швидкості. |
|
|
|
|
|||
2.Діапазон регулювання в розімкненій структурі (8-10):1. Стабільність швидкості – висока.
3.Регулювання плавне.
4.Припустиме навантаження – М Мн при регулюванні вниз від
основної швидкості Ф const , P Pн при регулюванні швидкості вище за основну Ф<Фн .
5.Спосіб економічний в експлуатації – немає додаткових елементів, що розсіюють енергію; як буде показано далі, малі втрати в перехідних процесах. Безсумнівна перевага – гнучкість керування координатами в замкнених структурах. Сучасні методи так званого векторного керування забезпечують частотно-регульованому електроприводу практично ті ж властивості за керованістю, які має найдосконаліший електропривод постійного струму.
6.Спосіб вимагає використання перетворювача частоти (ПЧ) – пристрою, що управляє частотою та амплітудою вихідної напруги. Такі пристрої, досконалі і доступні, з’явилися в останнє десятиліття, однак вони ще порівняно дорогі – близько 100 $/кВт.
Параметричне регулювання. Відсутність донедавна доступного і якісного перетворювача частоти призводило до пошуку інших рішень, одне з яких –
зміна U1 при f1 f1н const. (рис. 6.6, а).
Як видно, критичний момент при такому регулюванні буде знижуватися пропорційно U12, а критичне ковзання залишиться незмінним (суцільні лінії на рис. 6.6, б). У замкненій за швидкістю структурі (пунктир рис. 6.6, а) можна отримати характеристики, показані на рис. 6.6, б пунктиром. Таким чином, спосіб зовні виглядає досить привабливо.
Проведемо його оцінку.
1.Регулювання однозонне – вниз від основної швидкості.
2.Діапазон регулювання в замкненій структурі (3-4):1; стабільність швидкості задовільна.
3.Плавність висока.