


Лабораторні роботи. Синтез САК
Тема: Синтез систем автоматичного керування методом прямих ЛАЧХ
 Основні
теоретичні відомості
Основні
теоретичні відомості
Відповідно до класифікації САР можна поділити на три типи систем: стабілізуючі, програмні та слідкуючі. З них у даний час у різних галузях транспорту і виробництва все більше застосування знаходять слідкуючі системи, різноманітні як за призначенням, так і за будовою. Незважаючи на те, що ці системи перебувають у різних експлуатаційних умовах і до них ставляться різні тактико-технічні вимоги, які повинні певним чином ураховуватися при проектуванні кожної з них, методи їхнього синтезу залишаються в основному загальними. Загальність методів синтезу пояснюється загальністю структури та принципів побудови. Характерна риса структурних схем слідкуючих систем полягає в тому, що вони містять ряд паралельних ланцюгів зворотних зв'язків, які охоплюють ту саму послідовність ланок. Для синтезу таких систем часто використовують метод зворотних логарифмічних частотних характеристик (ЗЛЧХ).
Поряд з методом реалізації зворотної бажаної ЛАЧХ одним з найпоширеніших частотних методів синтезу коригувальних пристроїв є метод прямих логарифмічних частотних характеристик. Він проводиться в такий спосіб:
будується бажана логарифмічна амплітудна частотна характеристика, виходячи з необхідної точності системи та необхідної якості перехідного процесу;
ця характеристика порівнюється з нескоригованою системою;
визначається передавальна функція коригувального пристрою так, щоб при його включенні в систему, була б отримана бажана форма логарифмічної амплітудної характеристики.;
потім будується фазова частотна характеристика і оцінюється величина отриманого при цьому запасу стійкості системи та інших якісних показників.
 Завдання
Завдання
Варіант №1
Передаточна функція системи в розімкнутому стані:
 ,
синтезувати послідовний коректувальний
пристрій, щоб у замкнутому стані ця
система виконувала наступні показники
якості:
,
синтезувати послідовний коректувальний
пристрій, щоб у замкнутому стані ця
система виконувала наступні показники
якості:
 ,
,
 .
.
 Побудова
ЛАЧХ незмінної частини системи
Побудова
ЛАЧХ незмінної частини системи
Побудуємо ЛАЧХ незмінної частини системи:
За допомогою передаточної функції незмінної частини системи ( ) побудуємо ЛАЧХ незмінної частини системи, для цього знайдемо коефіцієнт підсилення та спряжуючі частоти:
 ,
,

Так
як ми нумеруємо спряжуючі частоти за
порядком зростання, враховуючи значення
частот, знайдених далі за розрахунками,
пронумеруємо спряжуючі частоти як
 та
та
 відповідно:
відповідно:
 ,
,

 ,
,

Знаючи
коефіцієнт підсилення:
 та спряжуючі частоти:
та
,
побудуємо, у програмі КОМПАС-3D, графік
ЛАЧХ незмінної частини системи (рис.
1):
та спряжуючі частоти:
та
,
побудуємо, у програмі КОМПАС-3D, графік
ЛАЧХ незмінної частини системи (рис.
1):
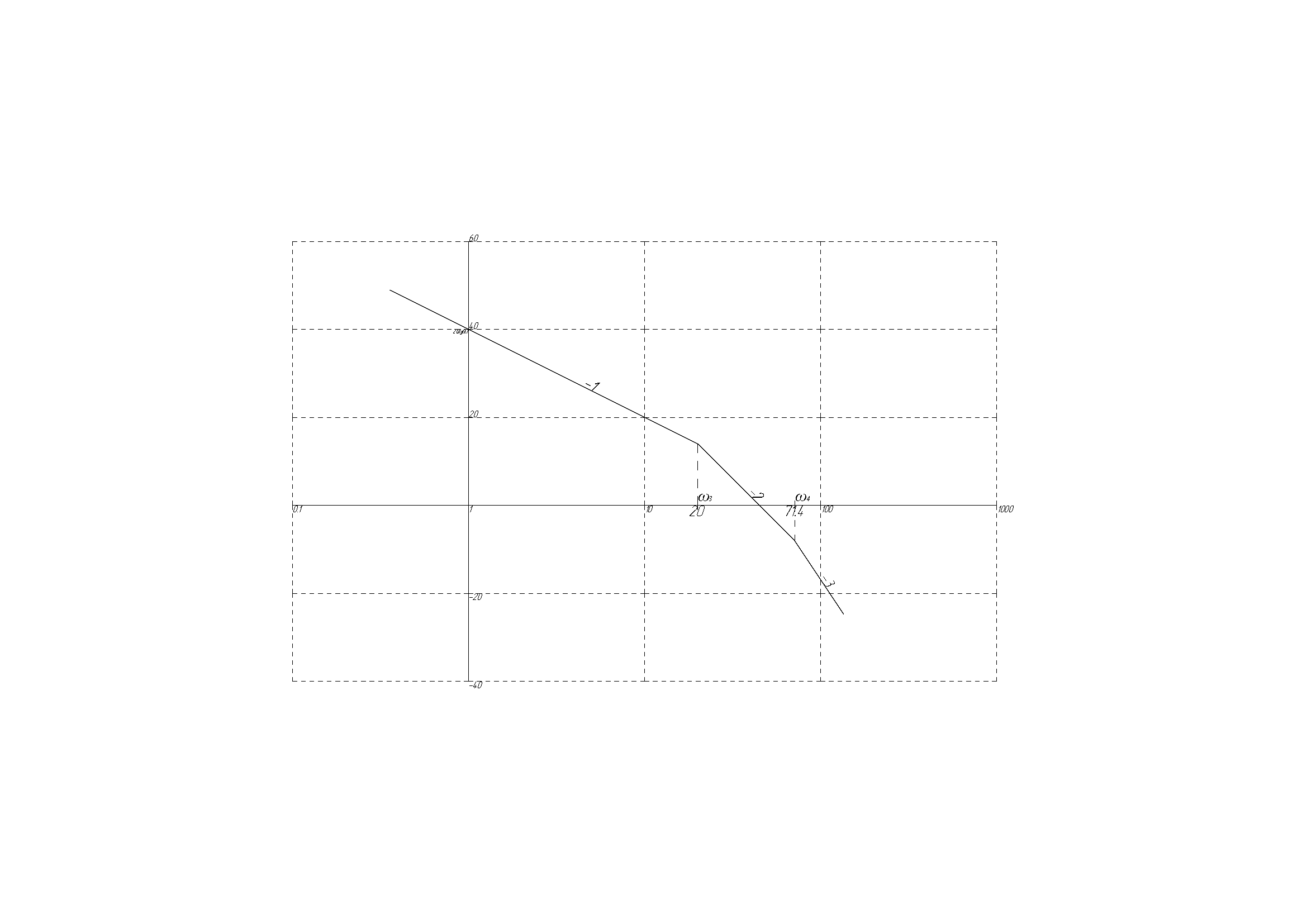
Рисунок 1 – ЛАЧХ незмінної частини системи

Побудова ЛАЧХ бажаної частини системи
Розглянемо формування бажаної ЛАЧХ, виходячи із заданих вимог до системи за точністю і якістю перехідного процесу. Вважаємо заданими значення показників якості перехідного процесу:
σmax максимальне перерегулювання;
tp максимальний час регулювання.
Побудову середньочастотної асимптоти бажаної ЛАЧХ починають із вибору частоти зрізу ωзр. Для цього використовується номограма на рис. 1.4 [1, с. 18], розроблена В.В. Солодовніковим. Вона визначає залежність перерегулювання σmax і часу регулювання tp від максимуму Рmax дійсної частотної характеристики замкненої системи, причому час регулювання tp дано у вигляді функції частоти зрізу ωзр.
Номограма використовується в такий спосіб. За заданим значенням перерегулювання σmax визначають значення Pmax. Потім по Рmax визначають співвідношення між tp і ωзр.
 Середньочастотна
асимптота бажаної ЛАЧХ проводиться
через точку ωзр
із нахилом –20 дБ/дек. При більшому нахилі
важко забезпечити необхідний запас
стійкості та припустиме перерегулювання.
Середньочастотна
асимптота бажаної ЛАЧХ проводиться
через точку ωзр
із нахилом –20 дБ/дек. При більшому нахилі
важко забезпечити необхідний запас
стійкості та припустиме перерегулювання.
Для зазначеного вибору за раніше знайденим значенням Pmax за допомогою кривих, показаних на рис. 1.5 [1, с. 19], визначають надлишок фази γ та граничні значення Lм логарифмічних амплітуд.
Для побудови сполучаючої асимптоти, спочатку потрібно провести пряму з ординатою Lм. Потім нанести сполучаючу асимптоту. Якщо нахил низькочастотної асимптоти –20 дБ/дек, то нахил сполучаючої асимптоти вибирається рівним –40 або –60 дБ/дек.
Починати спрягаючу асимптоту можна із точки середньочастотної асимптоти з ординатою Lм.
Рішення:
Побудуємо ЛАЧХ бажаної частини системи:
 Для
цього, за допомогою максимального
перерегулювання (
),
використовуючи першу номограму, на рис.
1.4 [1, с. 18], знаходимо значення:
Для
цього, за допомогою максимального
перерегулювання (
),
використовуючи першу номограму, на рис.
1.4 [1, с. 18], знаходимо значення:
 ,
та час регулювання:
,
та час регулювання:
 ,
звідси знаходимо частоту зрізу, знаючи
час регулювання (
):
,
звідси знаходимо частоту зрізу, знаючи
час регулювання (
):

Далі,
за допомогою другої номограми на рис.
1.5 [1, с. 19] знайдемо граничні значення:
 ,
та надлишок фази:
,
та надлишок фази:
 .
.
Знаючи
частоту зрізу:
 та граничні значення:
та граничні значення:
 ,
побудуємо графік ЛАЧХ бажаної частини
системи (рис. 2):
,
побудуємо графік ЛАЧХ бажаної частини
системи (рис. 2):
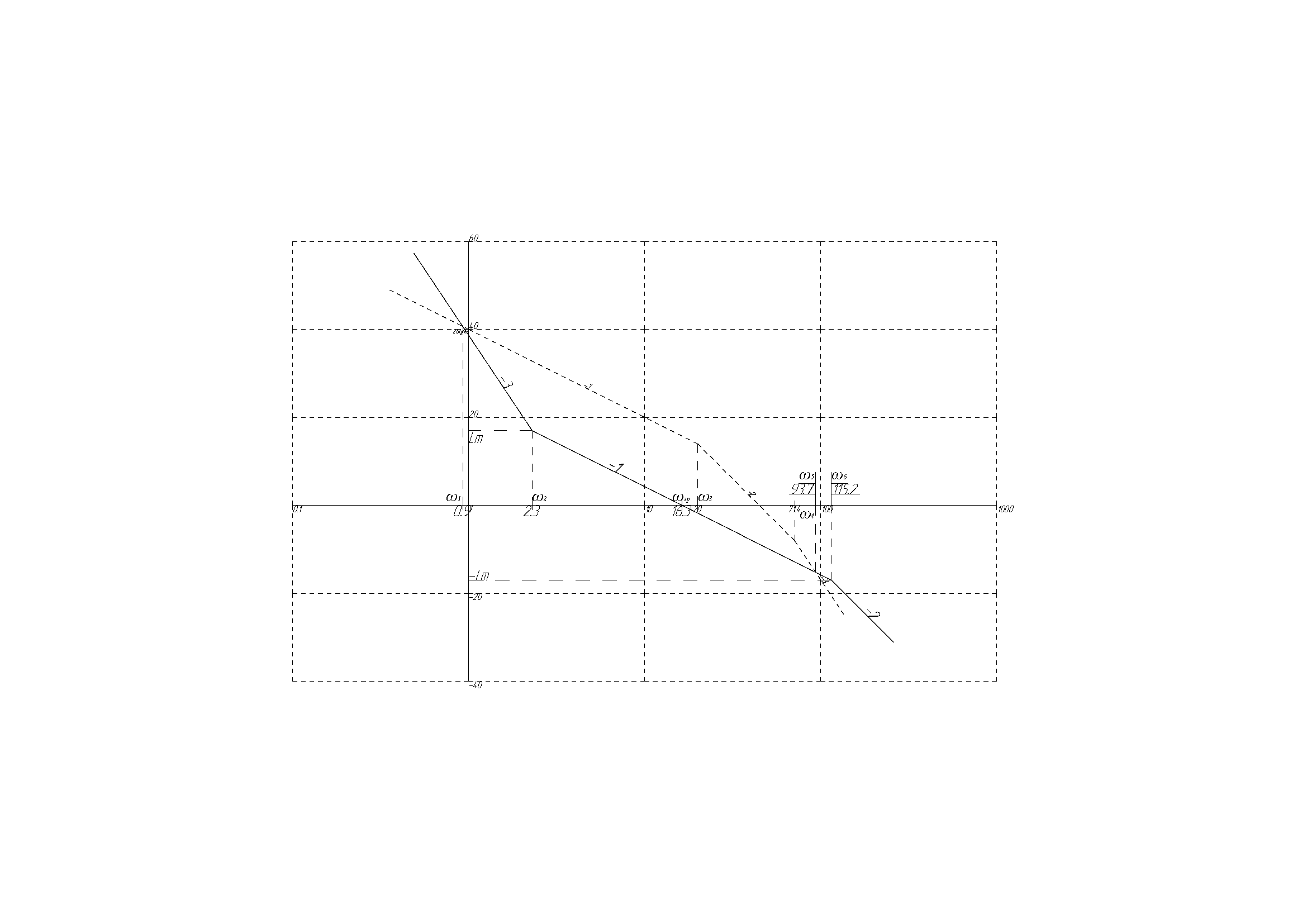
Рисунок 2 – ЛАЧХ бажаної частини системи
Побудувавши ЛАЧХ бажаної частини системи, ми можемо знайти частоти цього графіка:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
Та розрахувати постійні часу:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
Таким
чином, ми можемо побудувати передаточну
функцію  бажаної
частини системи:
бажаної
частини системи:

Змоделюємо передачу функцію бажаної частини системи в Matlab (рис. 3):

Рисунок 3 – Схема бажаної системи в Matlab
Далі побудуємо перехідну характеристику (рис. 4), ЛАЧХ та ЛФЧХ (рис. 5) бажаної частини системи, для того щоб знайти: значення перерегулювання, час регулювання, запас стійкості по фазі та запас стійкості по амплітуді:


![]()
Рисунок 4 – Перехідна характеристика бажаної системи в Matlab
 Маємо
значення перерегулювання:
Маємо
значення перерегулювання:
 ,
та час регулювання:
,
та час регулювання:
 ,
статична помилка відсутня. Показники
якості вписується в потрібні межі:
,
статична помилка відсутня. Показники
якості вписується в потрібні межі:
 та
та
 .
.
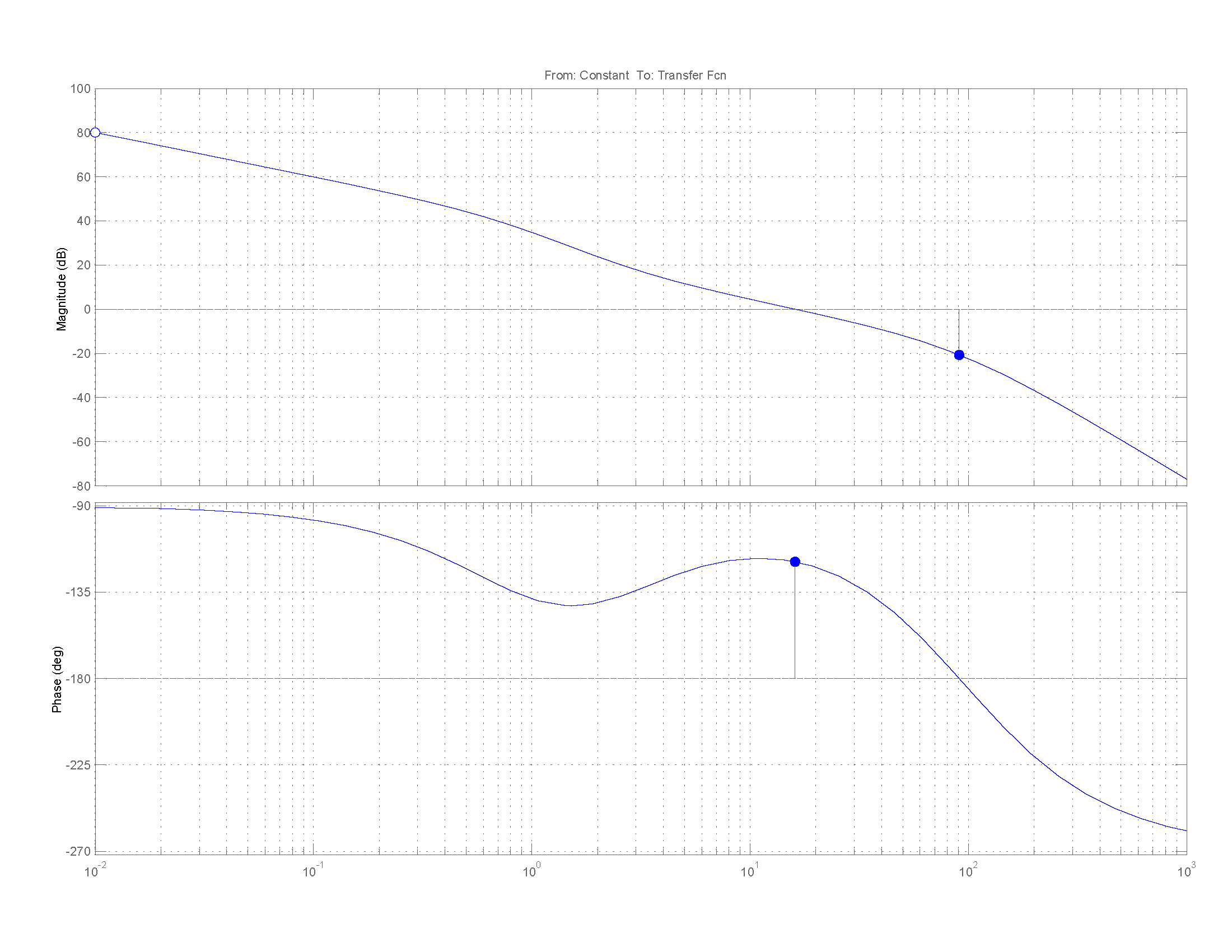
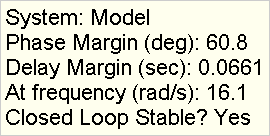

Рисунок 5 – ЛАЧХ та ЛФЧХ бажаної системи в Matlab
 Маємо
запас стійкості по амплітуді:
Маємо
запас стійкості по амплітуді:
 ,
та запас стійкості по фазі:
,
та запас стійкості по фазі:
 .
.
Синтез коригувальних пристроїв

При виборі типу коригуючої ланки (послідовної або паралельної) проектувальник має виважено оцінити всі недоліки та переваги того чи іншого варіанту.
Перевага послідовних коригувальних пристроїв полягає в тому, що вони часто можуть бути виконані у виді простих пасивних RC - контурів. Основним їхнім недоліком можна вважати те, що мінливість параметрів і характеристик елементів системи знижує ефективність дії послідовних коригувальних пристроїв, тому ставляться підвищені вимоги до стабільності характеристик елементів при їхньому застосуванні.
Інтегруючі (ті, що створюють відставання по фазі) RC-контури, які включаються послідовно, звичайно містять більш громіздкі конденсатори, ніж контури в колі зворотного зв'язку, а диференціюючі (ті, що створюють випередження по фазі) RC-контури дуже чутливі до перешкод.
Переваги паралельних коригувальних пристроїв полягають у наступному:
зменшення залежності динамічних властивостей системи від змін параметрів і характеристик елементів, які входять до її складу, тому вимоги до елементів можуть бути не такими жорсткими, як при застосуванні послідовних коригувальних пристроїв;
в елементах систем автоматичного регулювання, близьких до її виходу, розвивається значна потужність, тому живлення паралельного коригувального пристрою навіть у тому випадку, коли він споживає значну кількість енергії, не викликає ускладнень;
системи з паралельними коригувальними пристроями, не так піддаються впливу перешкод, які часто бувають в сигналі помилки, як системи з послідовними коригувальними пристроями; це пояснюється тим, що елементи системи, які включаються перед входом коригувальних пристроїв, відіграють роль фільтру низьких частот.
Недоліком паралельних коригувальних пристроїв є те, що вони часто складаються з дорогих або громіздких елементів (наприклад, тахогенератори або стабілізуючі трансформатори). Значні труднощі іноді виникають у зв’язку з вимогою до зворотного зв'язку не навантажувати попередні каскади посилення. У випадку застосування паралельних коригувальних пристроїв звичайно необхідні високі коефіцієнти підсилення.
Щоб знайти передаточну функцію
коригувального пристрою:
 .
Для цього зводимо на один графік ЛАЧХ
для бажаної частини системи:
.
Для цього зводимо на один графік ЛАЧХ
для бажаної частини системи:
 ,
та незмінної частини системи:
,
та незмінної частини системи:
 .
.
Оскільки потрібно, щоб:

то можна записати (після підстановки
 )
наступне:
)
наступне:

Звідки:

 Отже,
щоб знайти логарифмічну характеристику
для
,
потрібно відняти характеристику
Отже,
щоб знайти логарифмічну характеристику
для
,
потрібно відняти характеристику
 від
від
 .
.
Рішення:
Визначимо ЛАЧХ коригувального пристрою (рис. 6):

Рисунок 6 – Визначення ЛАЧХ коригувального пристрою
Передаточна
функція коригувальної
системи :
:

Далі, побудуємо передаточну функцію скоригованої системи:



Змоделюємо передачу функцію скоригованої системи в Matlab (рис. 7):
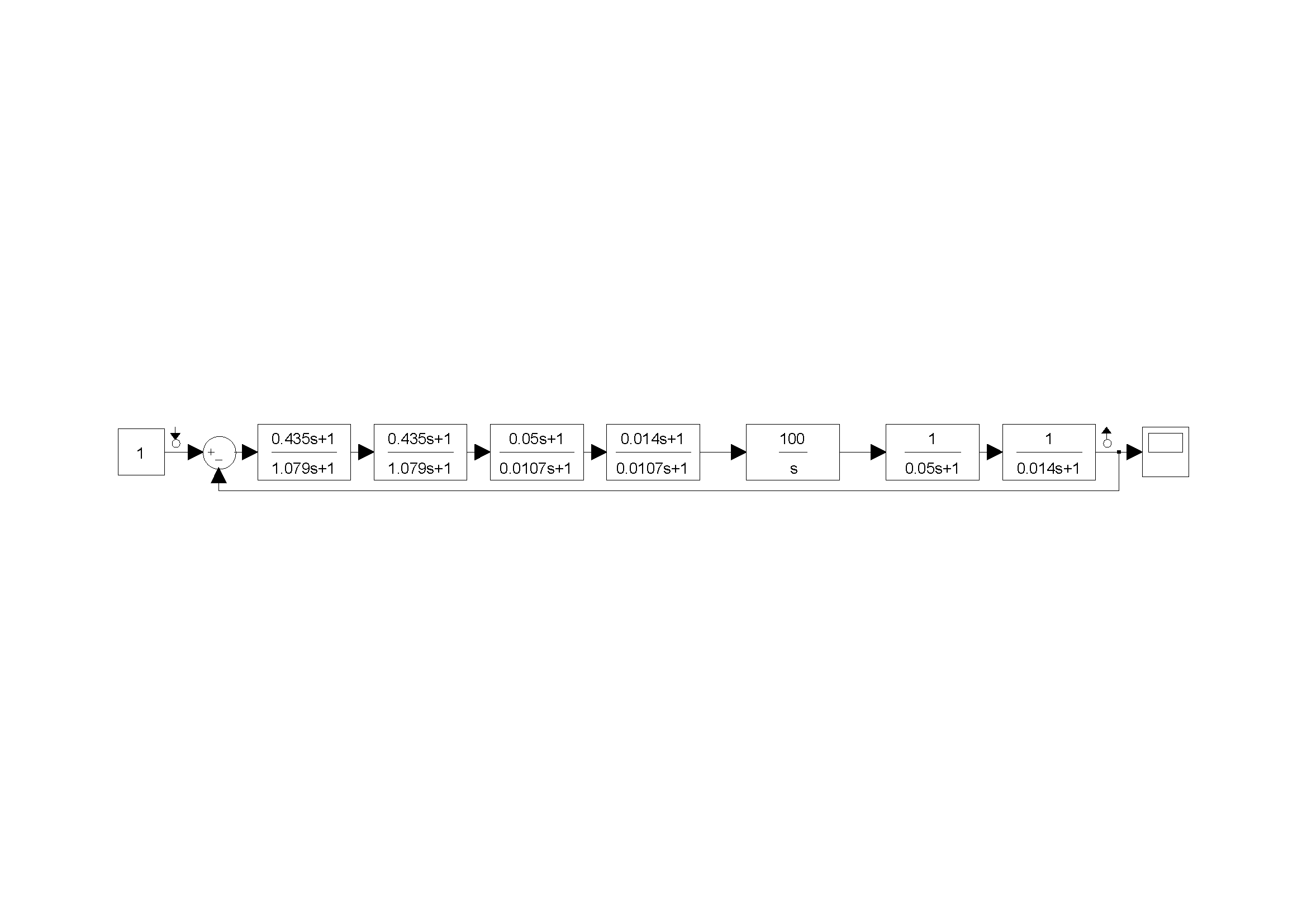
Рисунок 7 – Схема скоригованої системи в Matlab
Далі побудуємо перехідну характеристику (рис. 8), ЛАЧХ та ЛФЧХ (рис. 9) скоригованої системи, для того щоб знайти: значення перерегулювання, час регулювання, запас стійкості по фазі та запас стійкості по амплітуді:
Рисунок 8 – Перехідна характеристика скоригованої системи в Matlab
Маємо
значення перерегулювання:
,
та час регулювання:
.
 Результати ідентичні отриманим
раніше показникам якості (рис. 4 та рис.
8).
Результати ідентичні отриманим
раніше показникам якості (рис. 4 та рис.
8).
Рисунок 9 – ЛАЧХ та ЛФЧХ скоригованої системи в Matlab
 Маємо
запас стійкості по амплітуді:
,
та запас стійкості по фазі:
.
Результати ідентичні отриманим раніше
запасам стійкості (рис. 5 та рис. 9).
Маємо
запас стійкості по амплітуді:
,
та запас стійкості по фазі:
.
Результати ідентичні отриманим раніше
запасам стійкості (рис. 5 та рис. 9).
 Висновок
Висновок
При виконанні даних лабораторних робот я навчився синтезувати послідовний коректувальний пристрій з потрібними значеннями показників якості.
При виконанні робот, я отримав передаточну функцію скорегованої системи:

Після моделювання цієї передавальної функції в Matlab, я отримав наступні показники якості: перерегулювання: , та час регулювання: , що вписується в потрібні межі: та . Це означає, що синтез коригувального пристрою виконаний вірно.