

Петушок Илья КР ИАТК
.pdfМинистерство образования Республики Беларусь
Учреждение образования БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
КОНТРОЛЬНАЯ РАБОТА
по дисциплине
«Интегрированные автоматизированные технологические комплексы»
Выполнил: студент гр. 990241
Петушок Илья Михайлович
Проверил: |
Завадский С.М. |
Минск 2024
СОДЕРЖАНИЕ |
|
Шаговые двигатели и их применение |
................................ 3 |
Литература............................................................................ |
12 |
2
1. Шаговые двигатели и их применение
Шаговые электродвигатели с легкостью решают задачу точечного позиционирования при минимальных затратах сил и средств. Наиболее частое применение данный тип двигателей находит в различных роботах и станках с ЧПУ. Далее рассмотрим устройство и принцип действия этих устройств.
Устройство и принцип действия
Начнем с определения. Что такое шаговый двигатель? В общем смысле, это двигатель, преобразующий электрический ток в механическое действие (движение). Главной особенностью, отличающей его от собратьев, является принцип действия, заключающийся в прерывистом вращении вала, так называемых, шагах (отсюда и название), в отличие от обычных двигателей, у которых вал вращается непрерывно и менять можно только скорость этого вращения.
Один шаг – доля оборота двигателя. Размер шага напрямую зависит от физического устройства самого двигателя, а также от способа управления. Питаться шаговые двигатели могут от самых разных типов питания, и здесь кроется еще одно ключевое отличие от обычных двигателей. Шаговый двигатель управляется, в основном, при помощи импульсов, которые преобразуются в градусы, и уже после этого происходит вращение. К примеру, 1.8°-градусный двигатель поворачивает вал строго на 1.8° при каждом получении импульса. Данная особенность дает все основания называть такие двигатели цифровыми.
Рисунок 1 – Шаговый двигатель в классическом виде
3
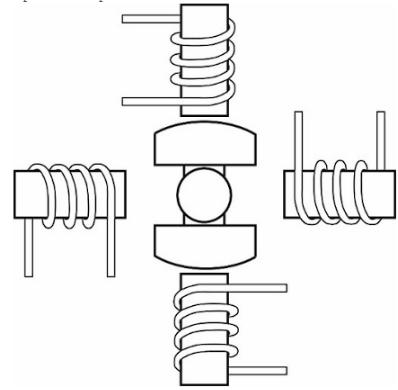
Четыре обмотки расположены кольцом на статоре на равном расстоянии друг от друга. Тип шагового двигателя напрямую зависит от способа подключения этих обмоток. На рис. 2 видно, что обмотки подключены в соответствии с направлением вращения, угол составляет 90°. Из того же рисунка можно понять, что вал провернется на 90° каждый раз, как ток заполнит катушку. Стоит отметить также, что одними из важнейших составляющих шаговых двигателей наряду с обычными являются ротор и статор.
Рисунок 2 – Расположение обмоток шагового двигателя
Режимы управления шаговым двигателем
Режим волнового управления. Данный режим отличается волновым воздействием на катушку, причем только на одну. Применяется в современном мире нечасто, так как данный режим характерен сниженным энергопотреблением, что в свою очередь сказывается на вращении двигателя, в результате чего удается задействовать меньше 50% крутящего момента. Большую нагрузку такой режим управления дать не позволяет, соответственно один оборот вала составляет всего четыре шага.
Полношаговый режим. Данный режим наиболее часто используется в настоящее время. Несомненным плюсом является попарная подача питания на катушки, что позволяет двигателю отдавать 100% крутящего момента. Если отталкиваться от рис. 2, то полный оборот вала, как и в предыдущем случае, составит четыре шага. Но теперь уже не от несовершенства режима управления, а от конструктивных особенностей двигателя.
4
Третьим рассматриваемым режимом стал режим полушага. Он отличается увеличенной вдвое точностью позиционирования ротора, при этом никак не изменяет конструкцию самого двигателя. Для использования этого режима необходимо подключить сразу все пары катушек, что позволяет совершать повороты всего на полшага. В режиме полушага на один оборот вала приходится в два раза больше шагов, что было бы невозможно с применением режимов, описанных в двух предыдущих пунктах. Из этого обстоятельства нетрудно сделать вывод, что точность позиционирования повысилась ровно в два раза, то есть рассматриваемый двигатель выдает уже восемь шагов вместе изначальных четырех.
Режим микрошага. Этот режим по праву можно считать самым лучшим
идающим самую большую точность позиционирования. Принцип его работы довольно прост, питание на катушки подается не в виде импульсов, как ранее, а в виде сигнала, по форме очень похожего на синусоиду, что позволяет плавно
иточно перемещать вал. Именно режим микрошага позволил широко применять шаговые двигатели в станках с ЧПУ, где как раз требуется очень высокая точность. Шаговый двигатель в режиме микрошага вращается очень плавно, что может ввести несведущих людей в заблуждение, они подумают, что в станке стоит обычный двигатель постоянного тока.
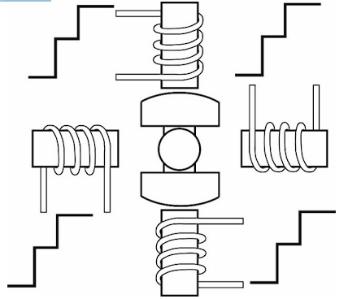
Из рис. 3 явно следует, что режим микрошага применяется при волновом типе. Визуально может показаться, что в микрошаговом режиме шаги увеличиваются, но это не так, точность повышается за счет применения шестерней с трапециевидными зубьями.
Рисунок 3 – Режим микрошага
Разновидности современных шаговых двигателей В наше время шаговые двигатели подразделяются на несколько видов:
5
Шаговые электродвигатели с постоянным магнитом. На их роторе находится постоянный магнит в форме диска, имеющий несколько полюсов. Принцип действия очень схож с режимом микрошага, т.е. катушки статора вступают во взаимодействие с магнитом ротора, что влечет за собой вращение. Шаг в двигателях с постоянным магнитом колеблется в значениях 45-90°. Шаговые электродвигатели с сопротивлением переменной величины. В роторах в двигателях этого типа отсутствуют постоянные магниты. На их замену приходит металлический сердечник ротора, имеющий сходство с диском с зубьями, или с шестерней. Статор все также несет на себе катушки, подключающиеся попарно, количество которых на сей раз начинает свое исчисление с цифры 4.
Отсутствие магнитов, несомненно, накладывает свой отпечаток, вследствие чего становится меньше крутящий момент. Но не все так печально, у таких двигателей нет момента стопорения, который физически обусловлен притяжением постоянных магнитов к корпусу статора в отсутствие питания на катушках. На рис. 4 представлено действие шагового двигателя с сопротивлением переменной величины.
Рисунок 4 - Шаговый двигатель с сопротивлением переменной величины
Если шаговый двигатель вбирает в себя несколько разных типов характеристик, такой двигатель называют гибридным. Такие двигатели обладают хорошим крутящим моментом и небольшой величиной шага (0.9- 5°), обеспечивая очень высокую степень точности. Конструкция гибридных двигателей способна вращаться с внушительной скоростью, что дает возможность их применения в станках с ЧПУ, а также в программируемых роботах. Однако, есть и недостаток – довольно высокая цена.
6

Ввиду невозможности изготовления магнита, инженеры нашли другой выход из ситуации. Были взяты два диска с пятьюдесятью зубьями и постоянный магнит, к полюсам которого приварили эти диски. После данной процедуры каждый диск стал иметь собственный полюс.
Рисунок 5 – общий вид шагового двигателя гибридного типа
Ввиду невозможности изготовления магнита, инженеры нашли другой выход из ситуации. Были взяты два диска с пятьюдесятью зубьями и постоянный магнит, к полюсам которого приварили эти диски. После данной процедуры каждый диск стал иметь собственный полюс.
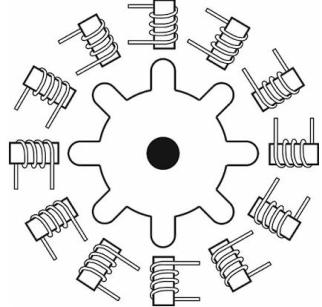
Необычность конструкции заключается в том, что диски расположены таким образом, что паз между зубьями одного диска располагается точно под вершиной зуба другого диска, вследствие чего визуально кажется, что перед нами один диск со 100 зубьями. На рис. 6 виден принцип действия гибридного шагового двигателя, обладающего 75 шагами за один оборот вала. Шесть обмоток расположены попарно, с заглушкой на противоположных концах. Первая пара расположена снизу и сверху обмотки, вторая смещена на 60+5° от первой, а третья смещена на 65° от второй. Разница в величине углов дает возможность вращения валу двигателя. В целях экономии энергии, применяются волновые режимы управления.
7
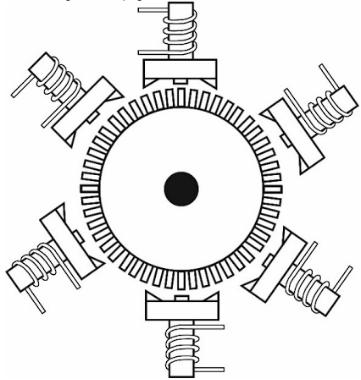
Рисунок 6 – Особенности ротора и магнитной системы двигателя гибридного типа
Во время работы катушки, на ней располагается три положительных полюса на 5° сзади, и три отрицательных полюса на 5° спереди. Они притягиваются или отталкиваются, соответственно, в сторону вращения вала. Рабочая обмотка всегда находится между двух разнозаряженных полюсов.
Разновидности схем подключения обмоток шагового двигателя
По своей сути, шаговые двигатели являются электронными приборами, у которых есть несколько фаз. Чем их больше, тем выше цена двигателя и тем мягче протекает его работа, однако момент вращения никак не зависит от числа фаз.
Наибольшее распространение получили двухфазные двигатели, у которых есть три типа подключения. У таких двигателей катушки совмещены друг с другом, используется различное количество проводных соединений для корреляции двигателя и управляющего контроллера. Наиболее проста конструкция и схема подключения биполярного двигателя. В этом случае используется четыре провода для контакта двигателя и контроллера. Подключение катушек производится последовательно, либо параллельно.
8
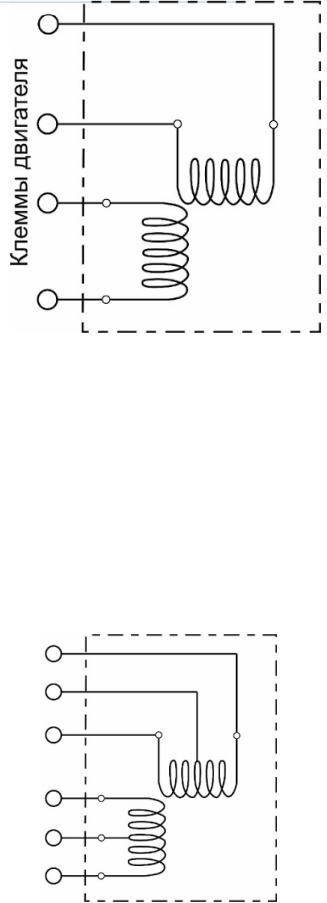
Рисунок 7 - Подключение биполярного двигателя
Двигатель, изображенный на рис. 7, имеет 4 контакта. Нижние отвечают за катушку, расположенную вертикально, верхние за горизонтальную. Но в этом случае возникают сложности с изменением полярности. Драйвер станет сложнее даже при изменении направления тока. Схему подключения униполярного двигателя отличает от предыдущей применение общего провода, который меняет местами полюса магнитов. Если подключить этот общий провод к земле, а на выводы катушки подать напряжение, полюса снова изменятся. Схема подключения очень проста и не требует специальных навыков для ее понимания. Чаще всего на каждой фазе управляющего напряжения стоит два транзистора.
Рисунок 8 - Схема подключения униполярного двигателя
9
Особняком от всех остальных стоит подключение с общим проводом. У данного метода один недостаток – катушки используются не полностью, а только половина их, также как в режиме волнового управления, описанного ранее. Крутящий момент равен в таком случае половине максимально возможного значения, поэтому униполярные шаговые двигатели проектируют и изготавливают вдвое больше стандартного размера, чтобы компенсировать недостачу крутящего момента.
Оригинальная конструкция шагового двигателя по схеме Лавета
Рассмотрим двигатели Лавета, применяющиеся, к примеру, в электронных кварцевых часах. Их конструктивные особенности дают возможность использования часов с одним фазовым сигналом, а также позволяют уместить весь механизм в миниатюрный корпус, удобный для ношения на руке. По названию двигателей несложно догадаться, что их изобретение принадлежит французскому инженеру Мариусу Лавету.
Статор двигателя его конструкции имеет сходство со статором электродвигателя с расщепленными полюсами. Обмотка одна, полюса образуют витки толстой медной проволоки, размещенные на магнитном проводе, что вместе создает требуемую фазу. Протекающие индуктивные токи создают искомый крутящий момент.
Распространение магнитного поля происходит с задержкой, что используется для сдвига фаз на 90°, для имитации двухфазного напряжения. Ротор представляет из себя постоянный магнит. Данная конструкция широко используется в бытовой технике (мясорубки, блендеры, миксеры и т.д.). Еще одно отличие двигателей Лавета состоит в стопорении с конкретным шагом. Благодаря этому и ходит секундная стрелка на наших с вами часах. Двигатель Лавета, как и подавляющее большинство шаговых двигателей, не предназначен для работы в реверсивном режиме.
Особенности применения шаговых двигателей
Помимо промышленного сектора и бытовой электроники, разнообразие шаговых двигателей применяется в радиотехнике, проектировании различных роботов, собственноручно изготовленных станков с ЧПУ. Приобрести шаговый двигатель в наше время не составляет никакого труда, их с легкостью можно найти в ближайшем радиомагазине или на множестве сайтов в интернете, специализирующихся на продаже электроники. В каждый такой двигатель устанавливаются постоянные магниты, электромагниты или сразу оба, все зависит от конструктивных особенностей конкретной модели двигателя.
Питание двигателя происходит от любого источника постоянного тока. По части механических характеристик отличия строятся на частоте вращения вала или рабочем напряжении. При высоких частотах крутящий момент на валу уменьшается, что тоже нашло свое применение в устройствах с невысокой динамикой.
Управлять шаговым двигателем можно тоже разными способами, через специальный контроллер или с помощью сложного электронного устройства.
10