

Лабараторная работа №2 (1)
.docxМинистерство образования Республики Беларусь
Учреждение образования БЕЛОРКССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
Лабораторная работа №2
По дисциплине: “Интегрированные автоматизированные технологические комплексы”
Выполнил: студент
гр. 990241 Автушко
Воронович
Зенькович
Кисель
Дуньчик
Цымончик
Мазаник
Миклашевич
Дьяченко
Синяк
Петушок
Проверил:
Минск 2024
Лабараторная работа №2
Система циклового управления промышленными роботами на основе программируемого микроконтроллера MITSUBUSHI ELECTRIC “ALPHA-2”
Цель работы: изучить цикловые системы управления роботами, принципы работы микроконтроллера MITSUBISHI ELECTRIC "ALPHA-2", среду инженерного программирования, использующую графический интерфейс. Получить навыки разработки программ управления в среде графического программирования.
Теоретические сведения: Система управления предназначена для формирования логической последовательности действий робота и обеспечения автоматической работы его устройств в соответствии с заданной программой, осуществления связи между действиями самого робота и обслуживаемого им оборудования и контроля за выполнением операций. Системы управления могут работать по жестким и гибким программам. Система управления с жесткой программой предназначена для выполнения повторяющихся операций в неизменной среде, имеет механическую память и задает движение рабочим органами робота в виде последовательности значений требуемых положений. Жестко программируемые системы управления могут быть цикловыми, позиционными, контурными и контурно-позиционными. Цикловые системы управления применяются для простейших роботов, работающих по заданному циклу, в которых фиксация подвижных элементов в заданных точках осуществляется жесткими упорами и с помощью концевых выключателей.
Отработка управляющей программы заключается в реализации управляющих параметров перемещения отдельных исполнительных механизмов промышленных роботов и обслуживающего оборудования. К этим параметрам относятся: положение исполнительных механизмов, скорость и ускорение их движения, время остановки и др. Для оценки временных параметров используют счетчики времени (таймеры), подключаемые в момент построения соответствующих команд. Временной интервал, формируемый с помощью таймера, и его сравнение с требуемым позволяют устанавливать нужные выдержки времени при работе робота. Для поддержания заданных пространственных и скоростных параметров движения исполнительных механизмов применяют различные следящие устройства (как по положению, так и по скорости и ускорению) в виде датчиков обратной связи (револьверы, индуктосины, потенциометры, сельсины, тахогенераторы и др.).

Рисунок 1 - Структурная схема мипропроцессорного устройства циклового управления
В общей структуре микропроцессорного устройства циклового управления процессор, осуществляющий логическую обработку информации в соответствиис записанной в памяти программой по реализации алгоритмов управления, является основным элементом управляюще-вычислительного модуля и создает возможность работы в реальном масштабе времени за счет развитой системы прерываний и программируемого таймера. Система памяти устройства включает в свой состав следующие модули: а) постоянного запоминающего устройства; б) оперативного запоминающего устройства; в) полупостоянного запоминающего устройства.
Описание работ схемы управления на MITSUBUSHI ELECTRIC “ALPHA-2”
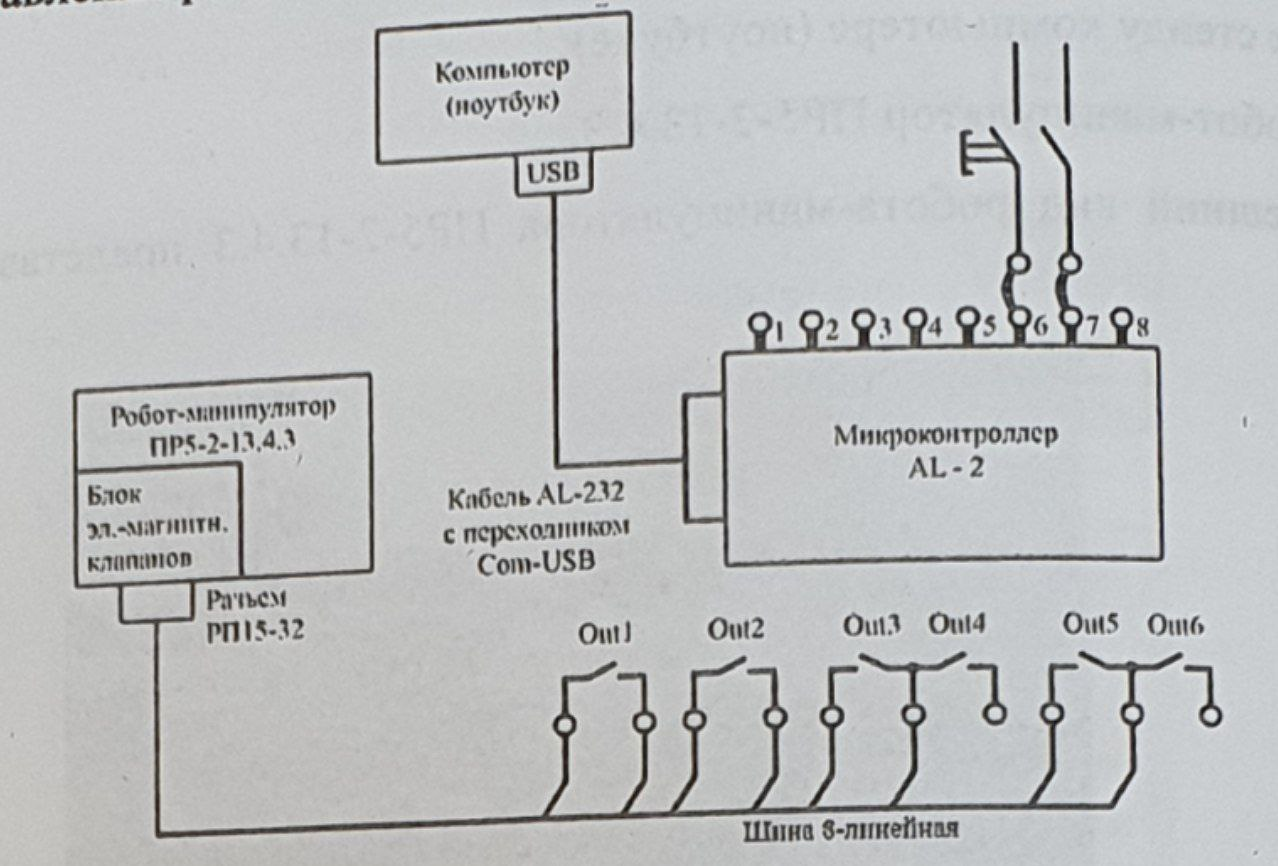
Рисунок 2. - Схема управления роботом-манипулятором.
Схема управления включает в себя: персональный компьютер, кабель комутации ПК с микроконтроллером. Микроконтроллер, с кнопкой и тумблером. Шина передачи данных между микроконтроллером и блоком электромагнитных клапанов комутируемая через разъём РП15-32. Робот манипулятор ПР5-2-13.4.3 управляемый электромагнитными клапанами.
Разработанная программа управления в среде графического программирования:
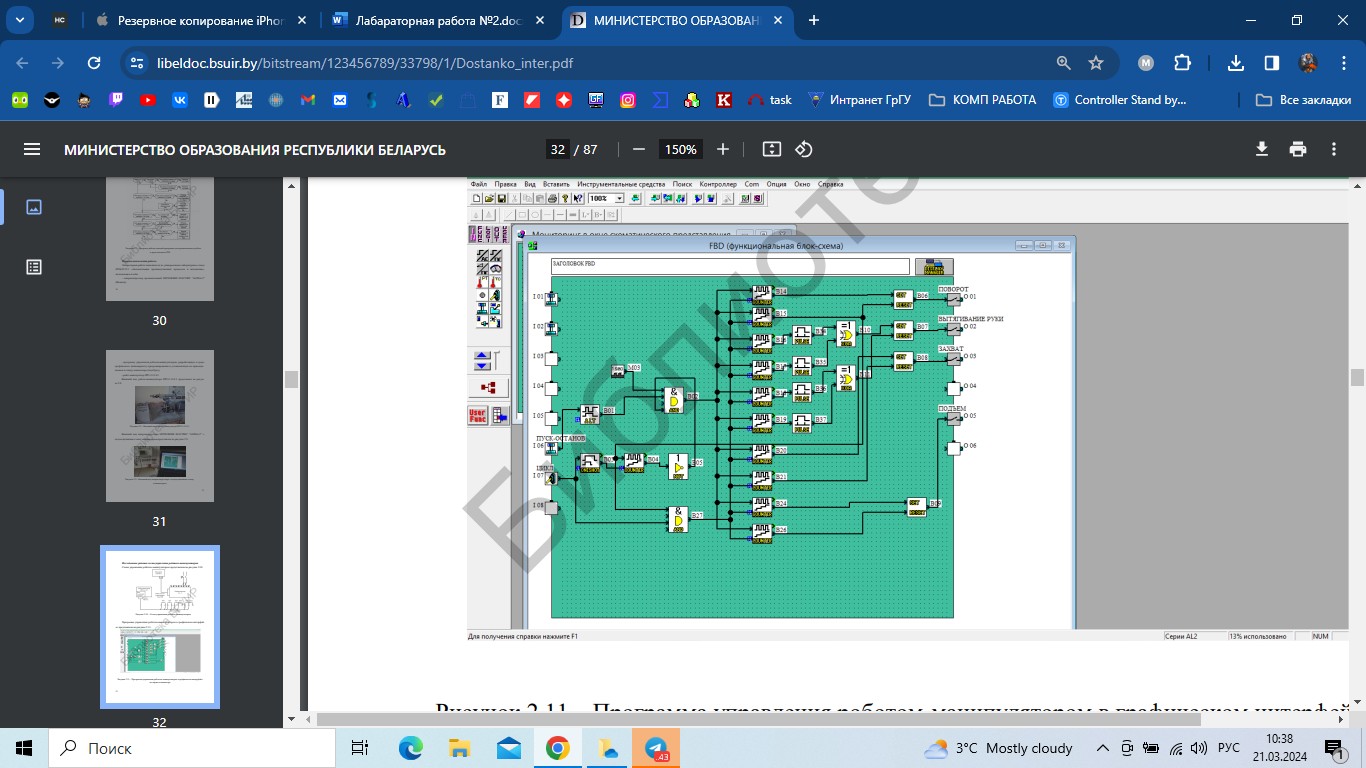
Рисунок 3 - Программа управления роботом-манипулятором в графическом интерфейсе.
В программе управления с помощью графического интерфейса была составлена программа для управления роботом манипулятором
В программе организована последовательная работа с манипулятором. Первым шагом подаётся сигнал на электромагнитный клапан отвечающий за вытягивание манипулятора. После сигнал идёт на клапан отвечающий за захват. Третьим шагом сигнал идёт на электромагнитный клапан управляющий подъёмом манипулятора. Четвертый шаг втягивание манипулятора. Пятый шаг разворот манипулятора на 180 градусов. Шетой шаг повторяет первый шаг. Седьмой шаг подаёт сигнал на электромагнитный клапан отвечающий за разжатие манипулятора. Последний шаг подаёт 2 сигнала на опускание манипулятора и втягивание его. Цикл можно повторить один раз или переключить тумблер в положение цикличности и тогда цикл будет повторяться заданное в программе (6 раз) количество раз
При нодобности с помощью графического интерфейса можем постраивать время задержки между операциями, чтобы ускорять. отрабатывать и улучшать наш тех процесс.
Вывод: в данной лабораторной работе мы изучили цикловые системы управления роботами, принципы работы микроконтроллера MITSUBISHI ELECTRIC "ALPHA-2", научились использовать среду инженерного программирования, использующую графический интерфейс. Получили навыки разработки программ управления в среде графического программирования.