

|
Министерство науки и высшего образования Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования «Московский государственный технический университет имени Н.Э. Баумана (национальный исследовательский университет)» (МГТУ им. Н.Э. Баумана) |

Факультет «Специальное машиностроение»
Кафедра СМ-9 «Многоцелевые гусеничные машины и мобильные роботы»
Отчёт
По лабораторной работе №6
по дисциплине «Управление техническими системами»
на тему: «Построение следящей системы управления на примере управления дроссельной заслонкой автомобиля»
Вариант №1
Выполнил: |
|
|
Студент |
____________________ |
Новиков А. Д СМ9-81 |
|
подпись, дата |
фамилия, и.о., группа |
Преподаватель |
____________________ |
Пирожков Р.Д. |
|
подпись, дата |
фамилия, и.о. |
СОДЕРЖАНИ
ВВЕДЕНИЕ 3
1 Система управления дроссельной заслонкой 4
2 Определение показаний выводов платы при крайних положениях 6
3 Настройка параметров ПИД-регулятора системы управления заслонкой 7
ЗАКЛЮЧЕНИЕ 10
ПРИЛОЖЕНИЕ А 11
ПРИЛОЖЕНИЕ Б 12
СОДЕРЖАНИЕ 2
ВВЕДЕНИЕ 3
1 Система управления дроссельной заслонкой 4
2 Определение показаний выводов платы при крайних положениях 6
3 Настройка параметров ПИД-регулятора системы управления заслонкой 7
ЗАКЛЮЧЕНИЕ 10
Приложение А 11
Приложение Б 12
Приложение В 16
Введение
В данной лабораторной работе будут рассмотрены электронные системы управления заслонкой дроссельного патрубка двигателей. Так как прямой механической связи между педалью акселератора и дроссельной заслонкой в этой системе не существует, то необходима система управления с обратной связью по положению дроссельной заслонки, которая бы отслеживала положение педали акселератора и в соответствии с ним изменяла бы угол поворота заслонки.
В качестве объекта управления выступает дроссельная заслонка с электроприводом, в качестве устройства управления (регулятора) в лабораторной работе используется микроконтроллерная плата Arduino, знакомая по предыдущим работам. Для обеспечения обратной связи используется датчик положения дроссельной заслонки. Особенностью данной системы управления является то, что задающее воздействие g здесь заранее неизвестно, а определяется водителем нажатием на педаль акселератора. Таким образом, цель системы управления – следить за изменением задающего воздействия (угла нажатия педали акселератора) и отрабатывать его поворотом заслонки на соответствующий угол. Такие системы управления, в которых управляемая переменная y воспроизводит произвольно изменяющееся задающее воздействие g, называются следящими системами. Принципиальная схема изображена на рисунке 1.
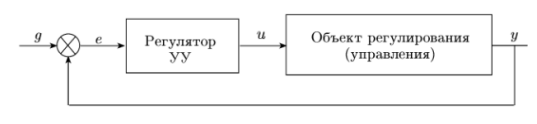
Рисунок 1 – блок-схема системы управления с обратной связью
Система управления дроссельной заслонкой
На рисунке 2 показана блок-схема системы управления дроссельной заслонкой для систем управления двигателем ЕВРО-3. В ней используется резистивный датчик педали акселератора, который состоит из двух независимых потенциометров, механически связанных с педалью газа. Поворот заслонки осуществляется с помощью электродвигателя, который через механический редуктор связан с осью заслонки. Угол поворота заслонки отслеживается при помощи двух независимых потенциометров, механически связанных с заслонкой. Дублирование датчиков в данной системе объясняется необходимостью обеспечить высокую надежность работы, так как это связано с безопасностью движения. В лабораторной работе будет использовано только по одному потенциометру для каждого датчика. При запуске двигателя ЭСУД считывает и обрабатывает сигналы от датчиков, установленных на двигателе и других узлах автомобиля. При этом реализуется управление дроссельной заслонкой, которая регулирует подачу воздушной смеси в цилиндры ДВС во всех его режимах.
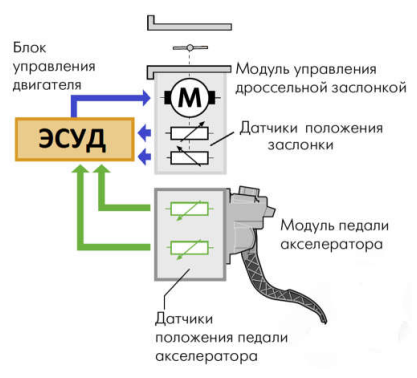
Рисунок 2 – Блок-схема системы управления дроссельной заслонкой
Конструктивно дроссельная заслонка состоит из корпуса, выполненного из композитного материала, заслонки с возвратной пружиной, связанной механически с помощью 2-хступенчатого редуктора с электродвигателем. В состав модуля также входит два независимых датчика положения дроссельной заслонки.
В лабораторной работе используется стенд, в состав которой входят: плата управления, на которой реализован электронный ключ для коммутации электродвигателя, и установлены три потенциометра для подбора коэффициентов ПИД-регулятора. К установке подключается модуль аналого-цифрового преобразователя Е14-140М для регистрации сигналов с помощью компьютера. Средние выводы потенциометров датчиков положения педали акселератора и угла дроссельной заслонки подключены к аналоговым входам платы Arduino A0 и A1, что позволяет оцифровывать значения напряжения на потенциометрах и вычислять ошибку для выработки сигнала управления. Цифровой вывод платы Arduino соединен с электронным ключом, выполненном на двух транзисторах VT1 и VT2. В цепь коллектор-эмиттер транзистора VT2 подключен электродвигатель дроссельной заслонки. Таким образом, если на выводе установлен высокий уровень сигнала (логическая «1»), то транзистор открыт и через электродвигатель протекает ток, и заслонка поворачивается, если на выводе установлен низкий уровень сигнала (логический «0»), то транзистор закрыт, и ток через электродвигатель не течет, заслонка возвращается в закрытое положение под действием возвратной пружины.