

ЛР_Д-3 ИССЛЕДОВАНИЕ П-, И-, ПИ- РЕГУЛЯТОРОВ
.pdfЛабораторная работа № Д-3
ИССЛЕДОВАНИЕ П-, И-, ПИ- РЕГУЛЯТОРОВ
Цель работы: изучение влияния различных типов регуляторов на характер переходного процесса в системе.
В качестве объекта управления выберем систему (колебательное звено) с
передаточной функцией Wсу (s) |
|
К |
|
. Структурная схема объекта с |
||||
|
|
|
||||||
Т 2 s 2 |
|
|
||||||
|
2 Ts |
1 |
|
|
|
|
||
такой передаточной функцией будет иметь вид, показанный на рис. 1. |
|
|
||||||
|
|
|
|
Модель системы с регу- |
||||
|
|
|
|
лятором в общем виде пока- |
||||
|
|
|
|
зана на рис. 2. |
|
|
|
|
|
|
|
|
Основной |
целью |
ис- |
||
|
|
|
|
пользования регуляторов |
яв- |
|||
Рис. 1. Структурная схема модели |
|
ляется |
уменьшение |
статиче- |
||||
|
ской |
погрешности. |
Кроме |
|||||
колебательного звена |
|
|
||||||
|
|
того, подбирая параметры ре- |
||||||
|
|
|
|
|||||
|
|
|
|
гуляторов, можно улучшить |
||||
|
показатели переходного процесса – время |
|||||||
|
регулирования и перерегулирование. |
|
||||||
|
|
Основные параметры, характеризую- |
||||||
Рис. 2. Структурная схема |
щие переходной процесс, показаны на |
|||||||
рис. 3. |
|
|
|
|
|
|
||
модели системы с регулятором |
|
|
|
|
|
|
||
|
|
|
|
Статическая |
погреш- |
|||
|
|
|
|
|
||||
|
|
|
|
ность ст представляет со- |
||||
|
|
|
|
бой разность между сигна- |
||||
|
|
|
|
лом, подаваемым на вход |
||||
|
|
|
|
системы, и сигналом, уста- |
||||
|
|
|
|
новившемся на |
ее выходе |
|||
|
|
|
|
после окончания |
переход- |
|||
|
|
|
|
ного процесса. |
|
|
|
|
Рис. 3. Параметры переходного процесса |
|
|
Время регулирования |
|||||
tp – это время, в течение которого кривая переходного процесса входит в пределы, определяющие точность регулирования. Эти пределы устанавливаются разработчиком системы. В данной работе точность регулирования, т. е. максимально допустимое отклонение кривой переходного процесса следует задавать не менее 5 % от установившегося значения. Таким образом, можно считать, что переходной процесс закончился после того, как кривая перестала выходить из заданного диапазона.
1
Перерегулирование — это максимальное отклонение переходной харак-
теристики от установившегося значения: |
X вых |
100 %. |
|
||
|
X вых. уст. |
|
Схема набора аналогична показанной в работе № Д-2.
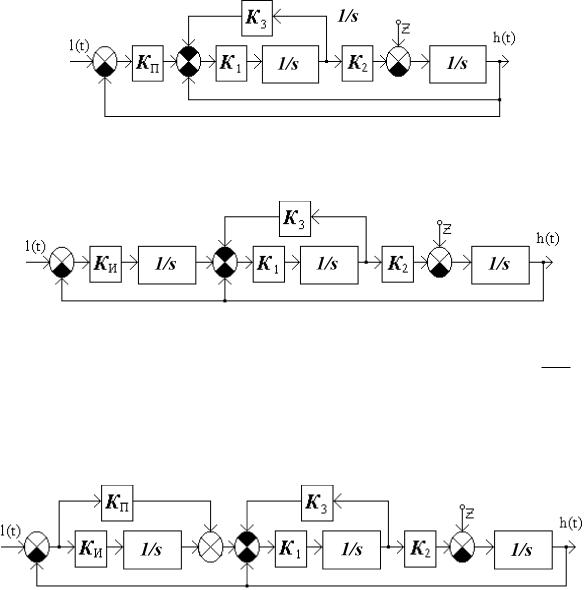
Сначала исследуется система без регулятора, структурная схема которой представлена на рис. 1. Необходимо определить параметры переходной характеристики и занести данные в табл. 1. В качестве возмущающего воздействия Z нужно подать на вход сумматора отрицательное постоянное смещение от блока
Constant.
Для исследования системы с П-регулятором строится модель по схеме, показанной на рис. 4. П-регулятор – это усилитель с передаточной функцией
WП=КП. Для нескольких значений коэффициента Кп определим параметры переходного процесса и занесем результаты в таблицу.
Рис. 4. Структурная схема модели системы с П-регулятором Схема модели системы с И-регулятором показана на рис. 5.
Рис. 5. Структурная схема модели системы с И-регулятором И-регулятор – это интегратор с передаточной функцией WИ (s) KpИ .
Вычислить параметры переходных процессов для нескольких значений Ки и занести данные в таблицу.
Схема модели системы с ПИ-регулятором приведена на рис. 6.
Рис. 6. Структурная схема модели системы с ПИ-регулятором
2
ПИ-регулятор представляет собой параллельное соединение интегратора и усилителя. Его передаточная функция: WПИ (s) K П КsИ .
Вычислить параметры переходного процесса для нескольких значений Ки и Кп и занести результаты в табл. 1.
|
|
|
|
|
|
|
|
|
Т а б л и ц а 1 |
|
|
|
|
|
|
|
|
|
|
Тип |
Значение |
Хвх, |
Хуст, |
|
ст, |
Тк, |
tр, |
|
Характер |
параметров |
Х, В |
, % |
переходного |
||||||
регулятора |
регулирования |
В |
В |
|
В |
мс |
мс |
|
процесса |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Без |
— |
|
|
|
|
|
|
|
|
регулятора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Кп=
ПКп= Кп=
|
Ки= |
|
|
|
|
И |
Ки= |
|
|
|
|
|
Ки= |
|
|
|
|
|
Кп= |
Ки= |
|
|
|
|
|
Ки= |
|
|
|
ПИ |
|
Ки= |
|
|
|
|
Кп= |
Ки= |
|
|
|
|
|
Ки= |
|
|
|
|
|
Ки= |
|
|
|
Задание
1.Снять переходные характеристики для различных параметров регуляторов.
2.Вычислить значения статических погрешностей и показателей качества переходного процесса.
3.Сравнить полученные результаты и сделать выводы.
Контрольные вопросы
1.Какова цель использования регуляторов в САУ?
2.Каковы основные параметры переходного процесса?
3.Как изменится время регулирования tp , если увеличить точность регулирования до 1 %?
4.Что называется статической погрешностью?
5.На основе проведенного анализа работы трех регуляторов выберите оптимальный.
3