

МИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра МВЭ
Отчет
По лабораторной работе №10
по дисциплине «Алгоритмы и вычислительные средства»
Тема:Алгоритмы и программы решения задач вычислительной геометрии
Студент гр. 3206 |
|
Корепанов Д. М. |
Руководитель |
|
Шевченко С. А. |
Санкт-Петербург
2024
Цель
Изучение и программирование алгоритма построения выпуклой оболочки набора точек.
Постановка задачи
Заданы: множество S из n точек в двумерном пространстве; алгоритм вычисления полярного угла вектора 1-2; алгоритм построения выпуклой оболочки набора точек (Jarvis)
Найти: выпуклый многоугольник, содержащий все точки множества S
Алгоритм выполнения работы
Реализовать в Программе 1 в Matlab алгоритм вычисления полярного угла вектора 1-2 в виде функции.
Протестировать Программу 1 на наборе векторов, имеющих полярные углы в 45, 135, 225, 315 град.
Реализовать в Программе 2 в Matlab алгоритм построения выпуклой оболочки набора точек (Jarvis) и вывода результатов (m – количество вершин многоугольника).
Оформить отчет, включив в него основную и модифицированную Программы 1 и 2; результаты тестирования Программы 1; исходные и конечные массивы sx, sy; копию построенного в Матлаб графика, подтверждающего полученную выпуклую оболочку.
Основная часть
Вычисление полярного угла
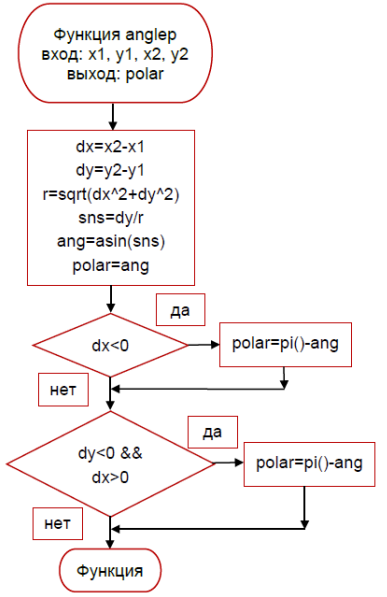
Рисунок 1 – Блок-схема алгоритма вычисления полярного угла вектора 1-2
Код программы
clc
clear
sx=[1, -1, -1, 1, 1];
sy=[1, 1, -1, -1, 1];
function[polar] = anglep(x1, y1, x2, y2);
dx = (x2-x1);
dy = (y2-y1);
r = sqrt((dx^2)+(dy^2));
sns = dy/r;
ang = asin(sns);
polar = ang;
if dx<0
polar = pi()-ang;
end
if dy<0 && dx>0
polar = pi()-ang;
end
end
for I=1:4;
x1=sx(I);
y1=sy(I);
x2=sx(I+1);
y2=sy(I+1);
p=anglep(x1, y1, x2, y2);
p
end
hp=compass(sx, sy);
Листинг результатов
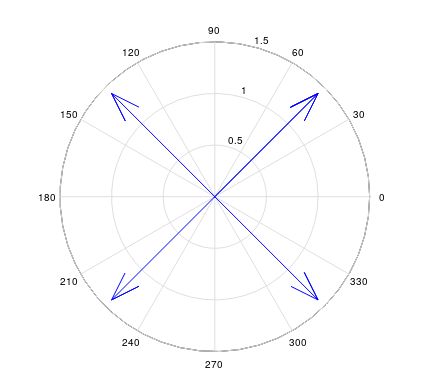
Рисунок 2 – Скриншот окна программы с результатами алгоритма
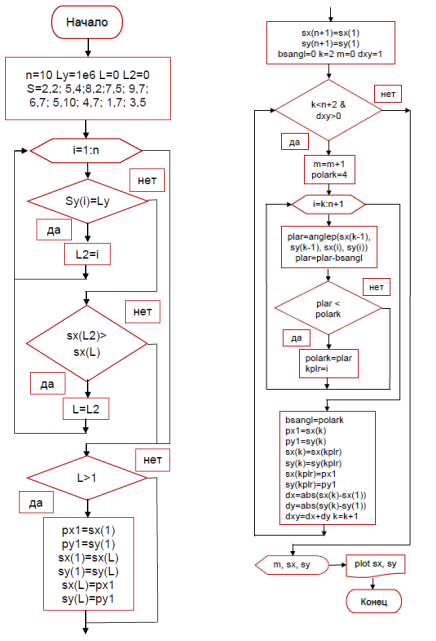
Рисунок 3 – Блок-схема алгоритма построения выпуклой оболочки набора точек (Jarvis) и вывода результатов
4.2.1. Код программы
clc;
clear all;
N = 10;
L = 1;
Ly=1e-6
L2=1
l2 = 1;
s = [2, 2; 5, 4; 8, 2;
7, 5; 9, 7; 6, 7;
5, 10; 4, 7; 1, 7; 3, 5];
sx=[2 5 8 7 9 6 5 4 1 3];
sy=[2 4 2 5 7 7 1 7 7 5];
function polar = anglePolar(x1, y1, x2, y2)
dx = x2-x1;
dy = y2-y1;
r = sqrt(dx.^2+dy.^2);
sns = dy/r;
ang = abs(asin(sns)); %Значение относительного положения точек по координате игрик в радианах
polar = ang;
if dy == 0 && dx < 0 %Находим полярные углы из положения на окружности
polar = pi();
elseif dx == 0 && dy < 0
polar = 3/2*pi();
elseif dx < 0 && dy > 0
polar = pi() - ang;
elseif dx > 0 && dy < 0
polar = 2*pi() - ang;
elseif dx < 0 && dy < 0
polar = pi() + ang;
end
end
for I = 1:N
if sy(I)<=Ly
L2 = I;
end
if sx(L2)>sx(L)
L = L2;
end
end
if L >= 1
px = sx(1);
py = sy(1);
sx(1) = sx(L);
sy(1) = sy(L);
sx(L) = px;
sx(L) = py;
end
sx(N+1) = sx(1);
sy(N+1) = sy(1);
bsangl = 0;
k = 2;
m = 0;
dxy = 1;
while (k < (N+2) && dxy > 0)
m = m+1;
polark = 100;
for i = k:(N+1)
polar = anglePolar(sx(k-1), sy(k-1), sx(i), sy(i));
if polar < polark && polar >= bsangl
polark = polar;
kplr = i;
end
end
bsangl = polark;
px = sx(k);
py = sy(k);
sx(k) = sx(kplr);
sy(k) = sy(kplr);
sx(kplr) = px;
sy(kplr) = py;
dx = abs(sx(k)-sx(1));
dy = abs(sy(k)-sy(1));
dxy = dx+dy;
k = k + 1;
end
plot(sx, sy, 'bo');
hold on;
plot(sx(1:m+1), sy(1:m+1), 'b-');
disp(m);
disp(sx);
disp(sy);
4.2.2. Листинг результатов
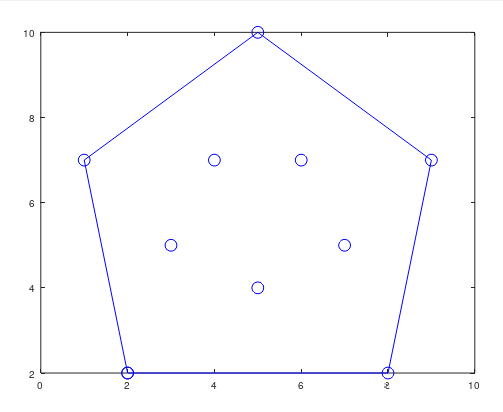
Рисунок 4 – Скриншот окна программы с результатами алгоритма
Вывод
В ходе выполненной работы изучены: алгоритм построения выпуклой оболочки набора точек и определения полярного угла векторов по массиву заданных точек, с выводом рисунка исполненной программы.