

Каталог оборудования_2015_v6
.pdfПривод станка |
|
электродвигатель |
АИР132М4 |
мощность, кВт |
11 |
частота вращения, об/мин. |
1500 |
|
|
Габаритные размеры станка, мм |
|
длина |
1220 |
ширина |
1246 |
высота |
1350 |
|
|
Масса станка, кг |
1220 |
|
|
ПРИМЕЧАНИЕ *) Vpr= Vs fpr , где fpr – коэффициент пробного пуска:
1,3 – при предельной рабочей скорости круга 32 – 50 м/с.
1,2 – при предельной рабочей скорости круга 63 и 80 м/с – см. ГОСТ Р 52588-2011
3. БАЗОВАЯ КОМПЛЕКТАЦИЯ
Станина |
1 шт. |
|
|
Головка шпиндельная |
1 шт. |
|
|
Камера испытательная |
1 шт. |
|
|
Кожух |
1 шт. |
|
|
Электрошкаф |
1 шт. |
|
|
411
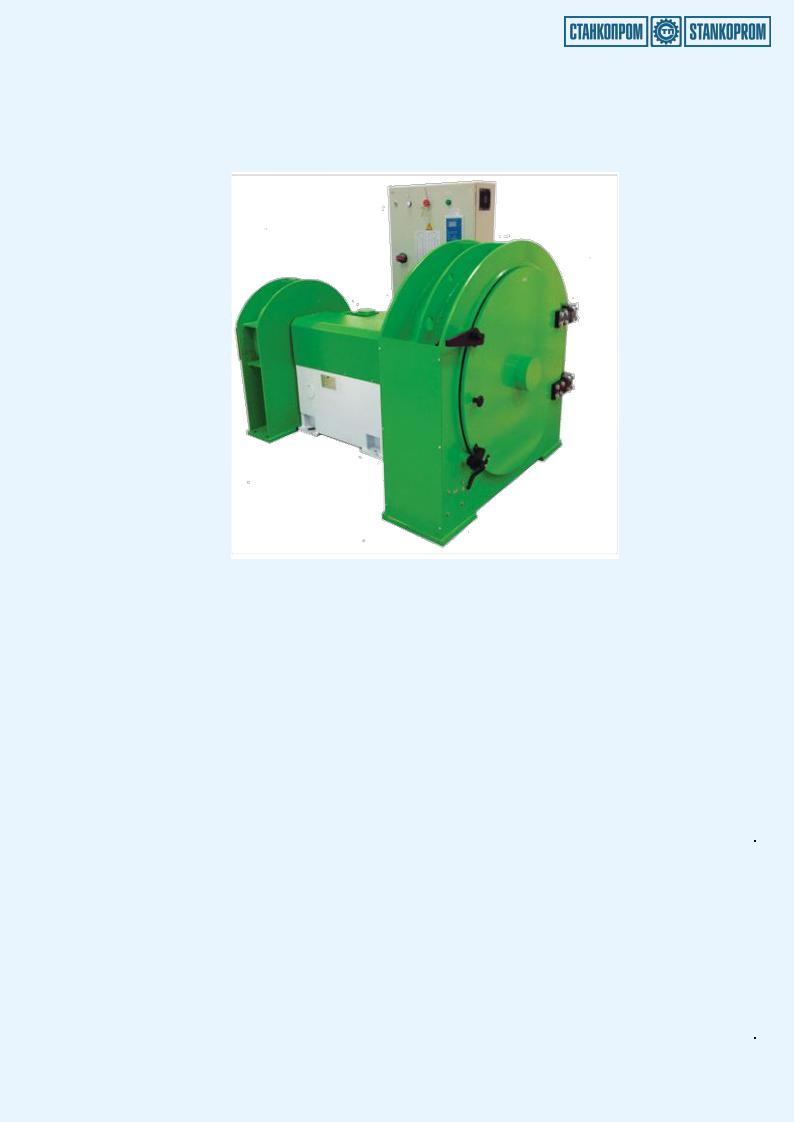
Станок двухкамерный для испытаний на прочность абразивных кругов модели СИП 800К2Л
1. ТЕХНИЧЕСКОЕ ОПИСАНИЕ
Станок предназначен для испытания на прочность абразивных кругов вращением.
2. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Наименование параметров |
|
СИП800К2Л |
|
|
|
|
|
Количество шпинделей на станке, шт. |
2 |
|
|
|
|
|
|
Количество испытательных камер на станке, шт. |
2 |
|
|
|
|
|
|
Размеры испытываемых абразивных кругов по ГОСТ Р 52781-2007, |
|
|
|
мм: |
|
|
|
в малой камере |
|
150…300 |
|
|
|
||
- наружный диаметр |
|
|
|
|
100 |
|
|
- наибольшая высота круга |
32; 50,8; 76,2; 127 |
|
|
|
|
||
- посадочный диаметр |
|
|
|
|
|
|
|
412
в большой камере |
350…750 |
- наружный диаметр |
200 |
- наибольшая высота круга |
203,2; 304,8 |
- посадочный диаметр |
|
|
|
Скорость пробного пуска Vpr*, м/с |
|
- наименьшая |
42 |
- наибольшая |
96 |
|
|
Предельная частота вращения шпинделя nmax, об/мин. |
10500 |
|
|
Регулирование частоты вращения шпинделя - с дискретностью: |
|
- для малого шпинделя (об/мин) |
1 |
- для большого шпинделя (об/мин) |
1 |
|
|
Электродвигатель привода вращения (малая камера) |
|
тип |
АИР 100 L2 |
мощность, кВт |
5,5 |
частота вращения, об/мин. |
3000 |
|
|
Электродвигатель привода вращения (большая камера) |
|
тип |
АИР 132 М4 |
мощность, кВт |
11 |
частота вращения, об/мин. |
1500 |
|
|
Габаритные размеры станка, мм |
|
длина |
1860 |
ширина |
1250 |
высота |
1550 |
|
|
Масса станка, кг |
2000 |
|
|
ПРИМЕЧАНИЕ *) Vpr= Vs fpr , где fpr – коэффициент пробного пуска:
1,3 – при предельной рабочей скорости круга 32 – 50 м/с.
1,2 – при предельной рабочей скорости круга 63 и 80 м/с – см. ГОСТ Р 52588-2011
413

3. БАЗОВАЯ КОМПЛЕКТАЦИЯ
Станина |
1 шт. |
|
|
Привод |
1 шт. |
|
|
Привод |
1 шт. |
|
|
Головка шпиндельная малой камеры |
1 шт. |
|
|
Головка шпиндельная большой камеры |
1 шт. |
|
|
Камера испытательная малая |
1 шт. |
|
|
Камера испытательная большая |
1 шт. |
|
|
Ограждение |
1 шт. |
|
|
Электрошкаф со стойкой |
1 шт. |
|
|
414
РОБОТЫ
Технологические универсальные роботы "TUR"
1. ТЕХНИЧЕСКОЕ ОПИСАНИЕ
Роботы серии "TUR" представляют собой промышленные роботы шарнирного типа, имеющие 6 степеней подвижности. Данные универсальные промышленные роботы применяются в следующих технологических операциях:
■контактная сварка; дуговая и плазменная сварка;
■нанесение клеев и герметиков;
■складирование и транспортирование грузов;
■лазерная и плазменная резка;
■резка водой высокого давления и т.д.
Роботы обеспечивают высокую надежность в эксплуатации и удобное обслуживание. Для их установки не требуется большая площадь. Кинематическая конструкция манипулятора робота позволяет оптимизировать его положение относительно обрабатываемой детали или заготовки. Они имеют портативный пульт, который обеспечивает оператору удобное программирование движений робота на этапе отладки программы.
415

2. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
№ |
|
|
|
|
|
|
|
TUR |
|
Наименование характеристики |
TUR 15 |
TUR 30 |
TUR 150 |
||||
|
350 |
|||||||
п.п. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. |
Номинальная грузоподъемность, кг |
15 |
30 |
150 |
350 |
|||
|
|
|
|
|
|
|
|
|
2. |
Дополнительная нагрузка (на руку) при |
|
|
|
|
|||
|
номинальной грузоподъемности, |
не более, кг |
10 |
35 |
95 |
|
||
|
|
|
|
|
|
|
|
|
3. |
Длина руки, не менее, мм |
|
|
1600 |
2000 |
3000 |
2800 |
|
|
|
|
|
|
|
|
|
|
4. |
Число степеней подвижности |
|
|
6 |
6 |
6 |
6 |
|
|
|
|
|
|
|
|
|
|
5. |
Тип кинематики |
|
|
антропоморфная, полярная система |
||||
|
|
|
|
|
|
координат |
|
|
|
|
|
|
|
|
|
|
|
6. |
Способ монтажа |
|
|
на полу, |
|
|
|
|
|
|
|
|
|
на |
на полу, |
|
|
|
|
|
|
|
потолке, |
на |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
на стене |
потолке |
на полу |
на полу |
|
|
|
|
|
|
|
|
|
7. |
Масса манипулятора, кг, не более |
|
|
260 |
700 |
1100 |
2400 |
|
|
|
|
|
|
|
|
|
|
8. |
Максимальная погрешность повторения |
|
|
|
|
|||
|
программной позиции, мм, не более: |
0,1 |
0,1 |
0,1 |
0,15 |
|||
|
|
|
|
|
|
|
|
|
9. |
Тип фланца инструмента |
|
|
|
DIN ISO 9409-1 |
|
||
|
|
|
|
|
|
|
|
|
10. |
Параметры |
Максимальное |
|
Ось 1 |
185˚ |
185˚ |
185˚ |
180˚ |
|
степеней |
перемещение, не менее |
|
|
|
|
|
|
|
подвижност |
|
|
Ось 2 |
+ 35˚/ |
+ 60˚/ |
+ 3˚/- |
+ 30˚/ |
|
|
|
|
|
|
|
||
|
и |
|
|
|
|
|
|
|
|
|
|
|
-155˚ |
-120˚ |
146˚ |
-150˚ |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Ось 3 |
+ 154˚/ |
+ 150˚/ |
+ 155˚/ |
+ 100˚/ |
|
|
|
|
|
-130˚ |
-120˚ |
-120˚ |
-150˚ |
|
|
|
|
|
|
|
|
|
|
|
|
|
Ось 4 |
350˚ |
350˚ |
350˚ |
350˚ |
|
|
|
|
|
|
|
|
|
|
|
|
|
Ось 5 |
130˚ |
120˚ |
122˚ |
130˚ |
|
|
|
|
|
|
|
|
|
|
|
|
|
Ось 6 |
350˚ |
350˚ |
350˚ |
350˚ |
|
|
|
|
|
|
|
|
|
|
|
Максимальная |
|
Ось 1 |
180 º/с |
130 º/с |
120 º/с |
90 º/с |
|
|
|
|
|
|
|
|
|
416

|
|
скорость |
|
Ось 2 |
180 º/с |
110 º/с |
|
110 º/с |
90 º/с |
|
|
перемещения, |
не |
|
|
|
|
|
|
Ось 3 |
180 º/с |
130 º/с |
|
120 º/с |
100 º/с |
||||
|
|
менее |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ось 4 |
350 º/с |
88 º/с |
|
180 º/с |
120 º/с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ось 5 |
350 º/с |
200 º/с |
|
180 º/с |
120 º/с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ось 6 |
620 º/с |
285 º/с |
|
250 º/с |
160 º/с |
|
|
|
|
|
|
|
|
|
|
11. |
Максимальная скорость рабочих перемещений |
|
|
|
|
|
|||
|
при контурном управлении (линейная |
|
|
|
|
|
|||
|
интерполяция), |
|
|
|
|
|
|
|
|
|
не менее |
|
|
|
|
120 |
|
||
|
|
|
|
|
|
|
|
|
|
417

СПЕЦИАЛЬНОЕ ОБОРУДОВАНИЕ
Пресс клепальный пневморычажный модели КП-204М
1. ТЕХНИЧЕСКОЕ ОПИСАНИЕ
Пресс предназначен для клепки мелких и средних узлов.
Инструментом для клепки служит обжимка и поддержка, которые устанавливаются на верхнем и нижнем плунжерах. Конструкция пресса и поставляемого с ним инструмента не обеспечивает предварительного сжатия пакета.
Усилия сжатия должны быть различными для различных толщин склепываемых пакетов и диаметров заклепок. Под усилием сжатия пакета нужно понимать усилие, с которым склепываемый пакет прижимается к упорной обжимке в начале образования замыкающей головки.
Для получения необходимых усилий сжатия пакета применяются цилиндрические пружины. Пружина должна обеспечивать получение необходимых усилий в начале клепки и не создавать
418

больших усилий пакета в конце клепки, для чего она должна быть сравнительно нежесткой. Требуемое усилие должно быть обеспечено за счет предварительного сжатия пружины при сборке клепального инструмента.
Приращение усилия сжатия пакета с начала образования замыкающей головки до конца клепки не должно быть более 10-20% от самого усилия сжатия пакета.
Склепываемый узел удерживается на руках или на поддерживающем устройстве, которым пресс оснащается непосредственно на месте эксплуатации в зависимости от геометрии и веса склепываемого узла.
Установка узла на клепальную позицию осуществляется визуально.
Усилие пресса при неизменном давлении воздуха в пневмосети постоянно.
Настройка пресса на клепку различных толщин пакетов и переход на другой диаметр заклепки производится за счет изменения вылета упора.
В течение всего рабочего цикла нога с педали не снимается. Автоматический рабочий цикл пресса обеспечивается воздухораспределительным устройством. В конце цикла необходимо снять ногу с педали, после чего пресс готов к повторению настроенного цикла клепки.
2. ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Наибольшее усилие, развиваемое прессом при давлении воздуха 0,45 мПа, Н |
5·104 |
|
|
|
|
Наибольший диаметр расклепываемых заклепок из материалов, мм: |
|
- алюминиевых сплавов В65, Д18 |
6 |
- стали 15А |
5 |
|
|
Наибольшая толщина склепываемого пакета, мм |
60 |
|
|
Вылет скобы, мм |
1000 |
|
|
Зев скобы, мм |
260 |
|
|
Расстояние от пола до средней плоскости клепки, мм |
1130 |
|
|
Число двойных ходов в минуту, дв.х./мин |
20…30 |
|
|
Диаметр плунжера и упора, мм |
30 |
|
|
Ход плунжера,мм: |
|
- вспомогательный |
53 |
- рабочий |
7 |
- обратный |
60 |
|
|
Диаметр цилиндра, мм: |
|
|
|
|
419 |

- рабочего хода |
160 |
|
- обратного хода |
56 |
|
|
|
|
Рабочий ход поршня, мм |
127 |
|
|
|
|
Расход воздуха за один цикл (расчетное), м3 |
0,011 |
|
|
|
|
Давление воздуха в пневмосети, МПа |
0,45…0,6 |
|
|
|
|
Предельный уровень шума. дБ |
80 |
|
|
|
|
Класс загрязненности сжатого воздуха по ГОСТ 17433-80 |
5 |
|
|
|
|
Габаритные размеры пресса, мм: |
|
|
- длина |
1800 |
|
- ширина |
770 |
|
- высота без изделия |
1600 |
|
|
|
|
Масса пресса, кг |
910 |
|
|
|
|
3. БАЗОВАЯ КОМПЛЕКТАЦИЯ |
|
|
|
|
|
Пресс клепальный пневморычажный модели КП-204М |
|
1 шт. |
|
|
|
Комплект запасных частей согласно ведомости ЗИП |
|
1 к-т |
|
|
|
Комплект отправной (эксплуатационной) документации |
|
1 к-т |
|
|
|
420