

m_th_i.v.belyantseva_2017
.pdfРис.2.4 Согласование работы двух регулируемых приводов с коррекцией сигнала для датчика с высокой дискретностью
1,15-РП; 2,14-датчик импульсов; 3,16-ПДЧ; 4-элемент НЕ; 5,13-ключ; 6-ИФП; 7-усреднитель; 8-ПЧН; 9-сумматор; 10-триггер-дискриминатор; 11-фильтр
В остальном схема повторяет работу схемы с датчиком низкой дискретности, рис.2.3.
40
В двух рассмотренных схемах рис.2.3 и 2.4 предлагалась коррекция сигнала как в положительном направлении, так и в отрицательном, с помощью сигнала со входа «+/–». Существуют станки, у которых требуется коррекция сигнала только в одном направлении, поэтому рассмотрим упрощенные схемы предлагаемые на рис. 2.5-2.8, с коррекцией сигнала только в положительном или только в отрицательном направлениях, опираясь на схему с датчиком низкой дискретности, рисунок 2.3.
Сначала обратимся к схеме с отрицательной коррекцией, рис.2.5. В данном случае сигнал подается с двух считывающих элементов ДИ1 2, и каждый подается на свой ПДЧ, со своим кодированным сигналом К. Далее сигнал от ПДЧ1 3 подается на ключ 4, а сигнал от ПДЧ2 13 на RS-триггер 10, периодически закрывая его, чтобы следующий импульс ПДЧ1 не мог пройти. Последовательность ПДЧ1 имеет бόльшую частоту, чем ПДЧ2. Тем самым уменьшается число импульсов, поступающих на ПЧН 6, следовательно понижается задающее напряжение привода РП2 12. После ключа установлен УС 5, чтобы выравнивать последовательность импульсов.
Добавив к данной схеме блок синхронизации 11, мы получим случай для датчика с высокой дискретностью, рис.2.6.
Теперь обратимся к схеме с положительной коррекцией, рис.2.7. В данном случае сигнал также подается с двух считывающих элементов ДИ1 2, и каждый подается на свой ПДЧ, со своим кодированным сигналом К. Далее сигнал поступает на элемент ИЛИ 4. Здесь невозможен одновременный приход единиц на вход ИЛИ, так как с датчика ДИ1 сигналы снимались в разные моменты времени. Поэтому сигналы от ПДЧ2 10 будут всегда прибавляться к последовательности от ПДЧ1 3. Тем самым повышается число импульсов, поступающих на ПЧН 6, следовательно повышается задающее напряжение привода РП2 12. Для равномерности импульсов после ИЛИ стоит УС 5.
41

Рис.2.5 Согласование работы двух регулируемых приводов с отрицательной коррекцией сигнала для датчика с низкой дискретностью
1,12-РП; 2,11-датчик импульсов; 3,13-ПДЧ; 4-ключ; 5-усреднитель; 6-ПЧН; 7-сумматор; 8-триггер-дискриминатор; 9-фильтр; 10-RS-триггер
42

Рис.2.6 Согласование работы двух регулируемых приводов с отрицательной коррекцией сигнала для датчика с высокой дискретностью
1,12-РП; 2,14ДИ; 3,13-ПДЧ;4-ключ;5-УС; 6-ПЧН;7-сумматор; 8-ТД;9-фильт; 10-RS-триггер; 11-БС
43

Рис.2.7 Согласование работы двух регулируемых приводов с положительной коррекцией сигнала для датчика с низкой дискретностью
1,12-РП; 2,11-датчик импульсов; 3,10-ПДЧ; 4-элемент ИЛИ; 5-усреднитель; 6-ПЧН; 7-сумматор; 8-триггер-дискриминатор; 9-фильтр
44
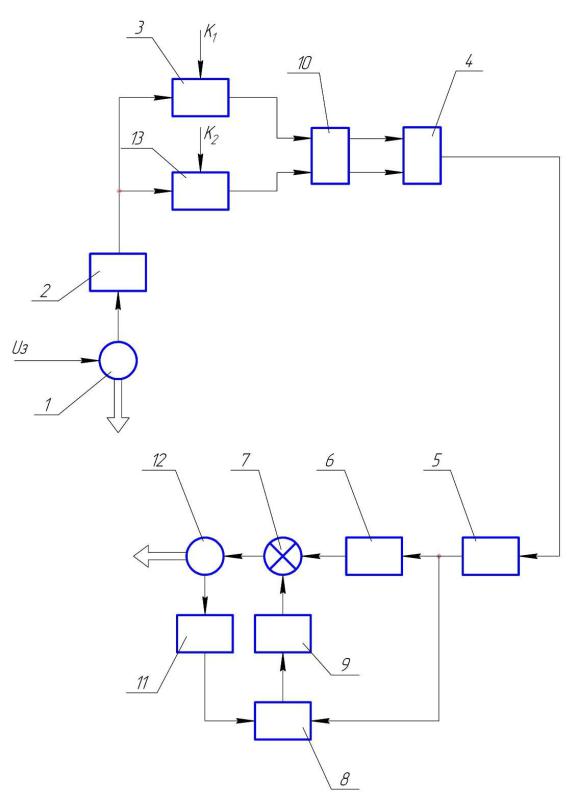
Рис.2.8 Согласование работы двух регулируемых приводов с положительной коррекцией сигнала для датчика с высокой дискретностью
1,12-РП; 2,11-датчик импульсов; 3,13-ПДЧ; 4-элемент ИЛИ; 5-усреднитель; 6-ПЧН; 7-сумматор; 8-триггер-дискриминатор; 9-фильтр; 10-БС
45
Добавив к данной схеме на рис.2.7 блок синхронизации 10, мы получим случай для датчика с высокой дискретностью, рис.2.8.
В разделе были рассмотрены способы и схемы повышения точности формообразующих перемещений путем замены механических схем на электронные схемы согласования движений, как между регулируемым и шаговым приводами, так и между двумя регулируемыми приводами. В схемах использующих шаговый привод рекомендуется использовать совместно программируемый делитель частоты на двоичном счетчике и кольцевой регистр сдвига. Для схем только с регулируемыми приводами, путем запараллеливания сигнала с датчика импульсов повышена точность передачи сигнала от датчиков с низкой и высокой дискретностью, что является очень важным для высокоскоростной обработки. В предложенных схемах дана возможность корректировки отклонения сигнала, как в сторону его увеличения, так и в сторону его уменьшения, как вместе, так и по отдельности. Использование электронных схем согласования формообразующих движений станка вместо механических цепей практически полностью устраняет кинематическую погрешность, тем самым повышая точность и эффективность обработки.
46

ГЛАВА 3. СОВРЕМЕННЫЕ КОНСТРУКЦИИ ДЕЛИТЕЛЕЙ ЧАСТОТЫ ИМПУЛЬСОВ, ИХ УСТРОЙСТВО И РАБОТА
Учитывая данные требования, были рассмотрены следующие конструкции делителей частоты импульсов.
3.1 ОПИСАНИЕ КОНСТРУКЦИЙ ДЕЛИТЕЛЕЙ ЧАСТОТЫ
Делитель на D – триггере
D-триггер или триггер задержки (от английского delay-задержка)
Рис. 3.1 D - триггер
В исходном состоянии на прямом выходе схемы «0», на инверсном «1», значит и на входе D тоже «1». Подаем на вход С высокий уровень. Единичка со входа переписывается в триггер, но на выходе еще не появляется. Снимаем высокий уровень со входа С – единичка появилась на прямом выходе, а значит на инверсном (и на входе D) установился ноль. Снова включаем синхронизацию и снова данные (на этот раз «0») записываются в триггер, но не появятся на выходе до тех пор, пока сигнал синхронизации не будет снят. На прямом выходе «0», на входе данных снова «1». Цикл деления закончится и выглядит он следующим образом:
Рис. 3.2 Временная диаграммаD-триггера
47

На графике хорошо видно, что на выходе уровень меняется в два раза реже, чем на входе синхронизации, и если циклы повторять, то частота повторения единичек на выходе триггера будет в два раза ниже частоты импульсов синхронизации.
Делитель на T-триггере
Т-триггер – это счетный триггер. У Т-триггера имеется только один вход. После поступления на этот вход импульса, состояние Т-триггера меняется на прямо противоположное. Счётным он называется потому, что он как бы подсчитывает количество импульсов, поступивших на его вход. Но считать этот триггер умеет только до одного. При поступлении второго импульса T-триггер снова сбрасывается в исходное состояние.
Т-триггеры строятся только на базе двухступенчатых триггеров, подобных рассмотренному ранее D-триггеру. Использование двух триггеров позволяет избежать самовозбуждения схемы, так как счетные триггеры строятся при помощи схем с обратной связью:
Рис. 3.3 Т - триггер
Рис.3.4 Временные диаграммы T-триггера.
48

Делитель на JK - триггере
К уже известным входам R (Reset) – сброс, S (Set) – установка, С - тактовый вход добавлены ещё два. Это входы J (Jump) и K (Kill). Благодаря наличию этих дополнительных входов появляется возможность несложными схемными средствами достигать интересных результатов..
Рис. 3.5 JK - триггер
Логика работы основных входов (C, J, K) реализована следующим образом. Если на входе J высокий потенциал, а на входе K – ноль, то триггер установится в единичное состояние по спаду тактового импульса на входе С. Если на входе J – ноль, а на входе К высокий потенциал то по спаду тактового импульса триггер "сбросится" в нулевое состояние. Когда J=K=0 независимо от тактовых импульсов состояние триггера не меняется. И если J=K=1, то при приходе каждого тактового импульса состояние триггера меняется на противоположное состояние. В этом случае триггер работает как делитель частоты на два.
Делитель с коэффициентом деления 2N
Как хорошо видно из рисунка, частота сигнала на выходе схемы ровно в два раза меньше частоты входного сигнала. Поэтому такая схема включения D-триггера называется делителем. Можно соединить последовательно любое количество делителей. Таким образом, в зависимости от числа последовательно соединенных триггеров, можно создать делитель с коэффициентом деления 2, 4, 8, 16, 32, 64 и т. д. Приведем пример такого делителя:
Рис. 3.6 Делитель частоты на D - триггере
49