

ЧМ пособие
.pdfМетод прост, но достаточно трудоемок. Более эффективными являются другие методы одномерного поиска, в частности, метод дихотомии и метод золотого сечения и метод средней точки.
7.3. Метод дихотомии
Пусть дана функция f(x), унимодальная на отрезке [a;b]. Обозначим a0=a
и b0 = b. |
|
|
|
|
|
|
|
|
|
Выберем на отрезке |
[a0;b0] две точки симметричные относительно |
||||||||
середины отрезка: |
|
|
|
|
|
|
|
|
|
α |
a0 b0 |
|
δ |
и β |
a0 b0 |
δ, |
0 δ |
b a |
, |
|
|
|
|||||||
1 |
2 |
|
|
1 |
2 |
|
2 |
|
|
|
|
|
|
|
|
||||
где - параметр метода, истинную величину которого определим ниже. Вычислим и сравним значения функций f( 1) и f( 1). В силу
унимодальности функции можно провести сокращение отрезка неопределенности по следующему правилу:
Еслиf( 1) f( 1), то x* [a0; 1] ; Если f( 1) >f( 1), то x* [ 1;b0].
а) |
b) |
|
Рис. 7.3-1 |
Если описанную процедуру принять за одну итерацию, то алгоритм поиска минимума можно описать следующим образом. Опишем (k+1)-ю итерацию, исходя из того, что k-й отрезок неопределенности найден [ak;bk]:
1. |
Вычисляются α |
|
ak bk |
δ |
и β |
|
ak bk |
δ. |
|
|
|||||||
|
k 1 |
2 |
|
k 1 |
2 |
|
||
|
|
|
|
|
||||
2. |
Находят значения f( k+1) и f( k+1). |
|
|
|
||||
|
|
|
|
|
61 |
|
|
|
3. Находят k+1-й отрезок неопределенности по правилу:
если f( k+1) > f( k+1), то x* [ k+1;bk], если f( k+1) f( k+1), то x* [ak; k+1]).
Сокращение отрезка |
|
проводятся до тех пор, пока не выполнится |
|||||
неравенство |
|
|
|
|
|
|
|
|
b a |
|
ε , |
|
|
bn 1 an 1 |
δ, |
n |
n |
n |
|
||||
n |
|
2 |
|
||||
|
|
|
|
|
|
||
где n– длина n-го отрезка неопределенности.
От итерации к итерации n убывает и при n стремится к величине 2 . При некотором значении n выполняется условие bn-an<ε. Следовательно, достичь заданной точности можно лишь выбирая 0< /2.Таким образом, величина достаточно мала, и можно сказать, что на каждой итерации длина отрезка неопределенности сокращается практически в два раза.
Длину конечного интервала неопределенности, обеспечивающего заданную величину , можно вычислить по формуле
|
|
0 |
2δ |
2δ. |
|
|
|||
|
|
|
|
|
n |
|
|
n |
|
|
|
|
2 |
|
Положив n= , можно определить соответствующее количество итераций:
n log |
|
0 |
2δ |
|
. |
|
|
|
|||
|
|
||||
2 |
ε 2δ |
|
|||
|
|
|
|
||
Пример 7.3-1. Найти минимум функции f(x)=x3-x+e-х на отрезке [0;1]c точностью и вычислить количество итераций, требуемое для
обеспечения точности.
Выберем =0.001 и положим a = 0;b = 1; |
Δ0 1 0 1: |
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 0.002 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
1) |
Если |
ε 0.1, |
|
то n log2 |
|
|
|
|
|
|
|
3.348 |
|
n 4. |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.1 |
0.002 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
Длина |
интервала |
|
|
|
1 0.002 |
0.002 0.064375. |
|
|
|
|
|
|
|
|
||||||||||||||||||||
4 |
24 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 0.002 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
2) |
Если |
ε 0.01, |
то n log2 |
|
|
|
|
|
|
|
6.963 |
|
n 7. |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.01 0.002 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
Длина |
интервала |
7 |
1 0.002 |
0.002 0.009797. |
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
7 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 7.3-1 |
|
|||
|
n |
|
|
|
an-1 |
|
|
|
bn-1 |
|
|
|
|
|
|
a1 |
|
|
|
b1 |
|
|
f(a1) |
|
|
f(b1) |
|
|
n |
|
||||
|
1 |
|
|
0 |
|
|
|
1 |
|
|
|
|
|
0.499 |
|
|
|
0.501 |
|
|
0.23239 |
|
|
0.23067 |
|
|
0.501 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
2 |
|
|
0.499 |
|
|
1 |
|
|
|
|
|
0.7485 |
|
|
0.7505 |
|
|
0.14392 |
|
|
0.14435 |
|
|
0.2515 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
62 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
0.499 |
|
|
0.7505 |
|
|
0.62375 |
|
|
0.6257 |
|
|
0.15486 |
|
|
0.15413 |
|
|
0.12675 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
4 |
|
|
0.62375 |
|
|
0.7505 |
|
|
0.68613 |
|
|
0.6881 |
|
|
0.14040 |
|
|
0.14023 |
|
|
0.06437 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
… |
|
|
….. |
|
|
….. |
|
|
….. |
|
|
…. |
|
|
….. |
|
|
….. |
|
|
…. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
7 |
|
|
0.701719 |
|
|
0.71931 |
|
|
0.70951 |
|
|
0.7115 |
|
|
0.13954 |
|
|
0.13959 |
|
|
0.00979 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
При |
|
= 0.1 |
x*=0.7183 |
f(x*)=0.1399, |
|
а при |
= 0.01 |
x*=0.7066 |
|||||||||||||||
f(x*)=0.13951.
7.4. Метод золотого сечения
В основу метода положено разбиение отрезка неопределенности [a;b] в соотношении золотого сечения, такого, что отношение длины его большей части ко всей длине отрезка равно отношению длины его меньшей части к длине его большей части:
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
l |
l2 |
|
|
|
|
|
|
|
l1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
l l |
l |
|
|
|
|
|
|
|
l . |
|||
2 |
1 |
,где |
|
|
|
|
|
|
|
, |
|
|
и |
|
l |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
l |
|
l |
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Положим l =1, |
тогда l22 = 1 - l2 , а |
l22 + l2 -1= 0, откуда |
|||||||||||||||||||
|
|
|
l |
|
1 |
|
5 |
0.618, |
l |
l l |
|
|
3 |
5 |
0.382 , |
||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
||||||||||
|
|
|
2 |
|
|
|
2 |
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
k |
|
|
l |
|
0.382, |
|
k |
|
|
l |
0.618, |
|
||||
|
|
|
|
|
|
1 |
|
|
2 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
1 |
|
l |
|
|
|
|
|
2 |
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
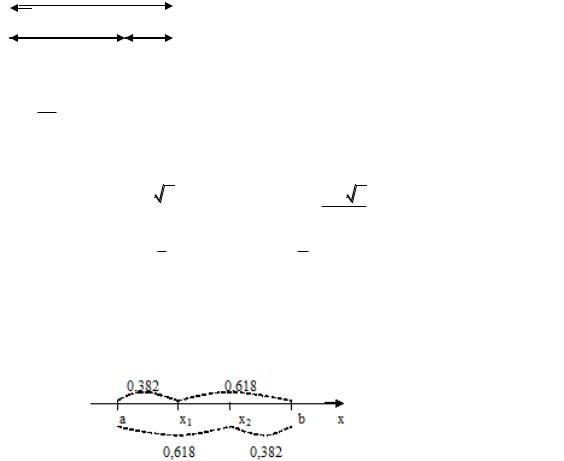
где k1, k2 - коэффициенты золотого сечения.
В методе золотого сечения каждая точка (х1 и х2)осуществляет золотое сечение отрезка.
63
x |
|
a |
5 1 |
(b a) a k (b a), |
|||||
1 |
|
|
|
||||||
|
|
2 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
a |
3 |
5 |
(b a) a k |
|
(b a), |
||
2 |
2 |
|
|
|
2 |
||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
k |
1 |
0.382, |
k |
2 |
0.618, |
|
|
||
|
|
|
|
|
|
|
|||
x |
|
a 0.382(b a) |
1 |
|
|
x |
2 |
a 0.618(b a) |
|
|
|
или
x |
1 |
a k (b a) |
||
|
1 |
|
||
x |
2 |
a k |
2 |
(b a) |
|
|
|
||
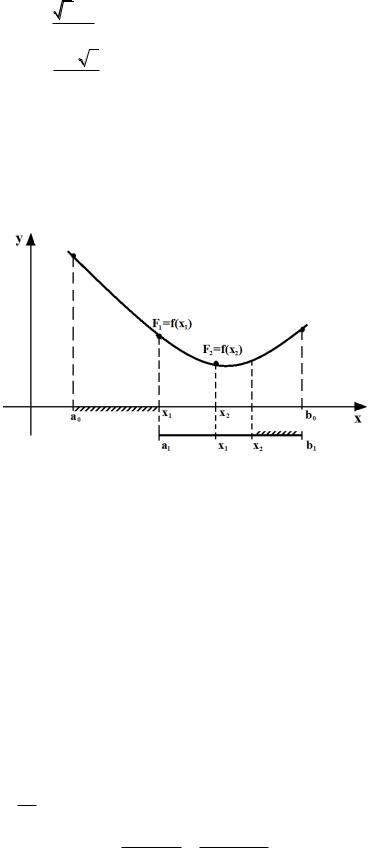
Геометрическая интерпретация метода золотого сечения приведена на рис. 7.4-1.
Рис. 7.4-1.
Нетрудно проверить, что точка х1 осуществляет золотое сечение не только отрезка [a;b], но и отрезка [a;х2]. Точно так же точка х2осуществляет золотое сечение не только отрезка [a;b], но и отрезка [х1;b]. Это приводит к тому, что значение целевой функции на каждой итерации (кроме первой) вычисляется один раз.
После каждой итерации длина отрезка неопределенности сокращается в 1.618 раза. Длина конечного отрезка неопределенности n = 0.618n 0, где
0= (b-a) – начальная длина отрезка. |
|
|
Условие окончания процесса итераций |
n . Отсюда можно найти |
|
количество итераций, необходимое для достижения точки минимума: |
||
|
n |
|
n |
0.618 |
0 |
|
||
Отсюда 0.618n n ,
0
поэтому, логарифмируя, получим
n |
lg(ε / |
0 |
) |
|
lgε lg |
0 |
. |
|
|
|
|||||
|
|
|
|
|
|
||
|
lg0.618 |
|
lg0.618 |
|
|
||
Пример 7.4-1. Пусть минимум функции f(x) = x3 – x + e-x отделен на отрезке [0;1]. Определить количества итераций и конечные длины
64
отрезков неопределенности, необходимые для достижения заданных точностей =0.1 и =0.01.
|
|
|
|
|
|
|
ε 0.1 |
n |
|
lg0.1/1 |
|
|
1 |
4.76 |
n 5, |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
lg0.618 |
0.21 |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
0.618 |
5 |
|
|
0.618 |
5 |
1 0.0901 0.1; |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
ε 0.01 |
n |
lg0.01/1 |
|
|
2 |
|
9.52 |
n 10, |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
lg0.618 |
|
0.21 |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
n 0.61810 |
|
|
|
0.61810 |
1 0.0081 0.01. |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
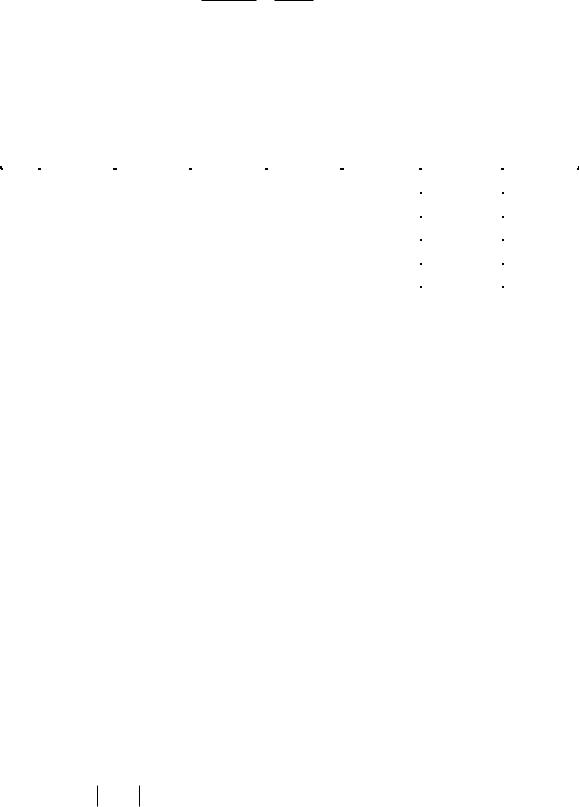
Таблица 7.4-1 |
|
|||
|
|
N |
|
|
a |
|
|
|
|
b |
|
|
|
|
x1 |
|
|
|
x2 |
|
|
|
|
f(x1) |
|
|
f(x2) |
|
|
n |
|
|
|
|
1 |
|
|
0 |
|
|
|
1 |
|
|
|
0.38196 |
|
|
0.61803 |
|
|
0.35628 |
|
|
0.15704 |
|
|
0.61803 |
|
||||||
|
|
2 |
|
|
0.38196 |
|
|
1 |
|
|
|
0.61803 |
|
|
0.76393 |
|
|
0.15704 |
|
|
0.14772 |
|
|
0.382 |
|
|||||||
|
|
3 |
|
|
0.61803 |
|
|
1 |
|
|
|
0.76393 |
|
|
0.85410 |
|
|
0.14772 |
|
|
0.19462 |
|
|
0.236 |
|
|||||||
|
|
4 |
|
|
0.61803 |
|
|
0.85410 |
|
|
0.70820 |
|
|
0.76393 |
|
|
0.13953 |
|
|
0.14772 |
|
|
0.146 |
|
||||||||
|
|
5 |
|
|
0.61803 |
|
|
0.76393 |
|
|
0.67376 |
|
|
0.70820 |
|
|
0.14188 |
|
|
0.13953 |
|
|
0.090 |
|
||||||||
При = 0.1 |
x*=0.718847, |
|
f(x*)=0.139925. |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
При = 0.01 |
x*=0.704139, f(x*)=0.139516. |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
7.5. Метод средней точки
Алгоритм метода средней точки основан на сокращении длины текущего отрезка неопределенности [a;b], путем отбрасывания его части, не содержащей точки минимума. Как известно, для того чтобы на отрезке [a;b] существовал минимум, необходимо, чтобы первая производная на нем была неубывающей. Выбирается пробная точка, принадлежащая отрезку (как правило, середина
отрезка c=(a+b)/2), и если |
f (c) 0 |
, то в следствии унимодальности функции |
||
|
||||
точка минимума не может лежать левее точки с, а если |
f (c) 0 |
, то не может |
||
|
||||
лежать правее точки с.
Пусть на отрезке [a;b] отделен единственный минимум функции f(x). Требуется определить значение точки минимума с заданной точностью .
Рассмотрим алгоритм поиска минимума по шагам:
|
|
|
|
|
f |
|
|
) 0 |
|
|
|
|
|
1. |
Положим i=0, ai=a, bi=b причем |
(a |
, а |
) |
0 . |
||||||||
|
|
i |
|
f (bi |
|
||||||||
2. |
Вычислим |
c |
ai bi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
2 |
и f (c) . |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
3. |
|
|
|
|
|
|
|
|
|
|
|
|
|
Если f (c) , то поиск закончен и следует перейти к шагу 4. |
|||||||||||||
4. Если  f (c)
f (c) 0 , то положить ai+1=с, bi+1=bi, i=i+1 и перейти к шагу 2.
0 , то положить ai+1=с, bi+1=bi, i=i+1 и перейти к шагу 2.
65
Если |
f (c) 0 |
, то положить |
|||
|
|||||
шагу 2. |
|
|
|
|
|
5. Вычислить X min |
|
ai bi |
и |
f min |
|
|
|||||
|
|
2 |
|
|
|
bi+1=с, |
ai+1=ai, i=i+1 и перейти к |
|||
f ( X |
min |
) |
. |
|
|
|
|||
Поскольку на каждой итерации отрезок унимодальности сокращается в два раза, то очевидно, что после некоторой n-й итерации длина отрезка [a;b]
вычисляется как
|
n |
|
|
b a |
||
2 |
n |
||
|
|||
|
|
||
. Однако этот метод имеет существенный недостаток
- вычисление производной от целевой функции.
Пример 7.5-1. Выполнить две итерации по нахождению минимума
функции |
f (x) 2x |
2 |
|
16 |
|
||||
|
x |
|||
|
|
|
||
|
|
|
|
отрезке [1;5].
1-я итерация:
методом средней точки, если минимум отделен на
1. |
a0=1, b0=5, |
|
|
16 |
, |
f |
|
12 |
и |
f |
|
19.36 |
||||||
|
|
2 |
||||||||||||||||
f (x) 4x |
x |
(1) |
(5) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
c |
a |
|
b |
|
1 5 |
3. |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
3. |
f |
|
|
|
10.22 0 |
, следовательно, a1=a0=1; b1=c=3. |
||||||||||||
(3) |
||||||||||||||||||
.
2-я итерация:
2. |
c |
a |
b |
|
1 3 |
2. |
1 |
1 |
|
||||
|
|
|
|
|
||
|
|
|
2 |
|
2 |
|
3.
 f (2)
f (2)
4
0
, следовательно, a2=a1=1; b2=c=2.
Тема 8. Многомерная оптимизация
8.1. Постановка задачи и основные определения
Задача, требующая нахождения оптимального значения функции m переменных f(Х)=f(x1, x2, …, xm), называется задачей многомерной оптимизации. Так же, как и для случая одномерной оптимизации, задача нахождения максимума функции сводится к задаче нахождения минимума путем замены целевой функции f на -f.
Пусть функция f(Х) = f(x1, x2, …, xm) определена на некотором множестве Х Rm. Если Х=Rm (т.е. ограничения на переменные x1, x2, …, xm отсутствуют), принято говорить о задаче безусловной минимизации. В противном случае, когда Х Rm, говорят о задаче условной минимизации.
66
Методы решения задачи безусловной минимизации являются основой для перехода к изучению более сложных методов решения задач условной минимизации.
В постановке задачи безусловной оптимизации для f(Х)=f(x1, x2, …, xm) требуется найти хотя бы одну точку минимума Х* и вычислить f*=f(Х*).Точка Х* Rm называется точкой глобального минимума функции fна множестве Х, если для всех Х Rm выполняется неравенство f(Х*) f(Х). В этом случае значение f(Х*) называется минимальным значением функции на Rm.
Точка Х* Rm называется точкой локального минимума функции, если существует такая - окрестность U этой точки ( >0), что для всех Х Х =Х U выполняется неравенство f(X*) f(X).
Подавляющее большинство методов решения задачи безусловной минимизации в действительности являются методами поиска точек локальных минимумов, среди которых затем выделяют глобальный минимум, являющийся наименьшим. Этот способ очень трудоемок, поэтому чаще используют другой: местоположение точки глобального минимума определяют в ходе анализа решаемой задачи, а затем для его уточнения с заданной точностью применяют один из методов поиска точки локального минимума. Рассмотрим функцию нескольких переменных и введем для нее основные определения.
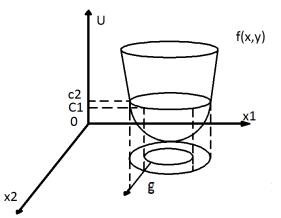
Множество точек, для которых целевая функция принимает постоянное значение f(x1, x2, …, xm) = c, называется поверхностью уровня. Для функции двух переменных (m = 2) это множество называется линией уровня.
Функция f(x1,x2) задает в трехмерном пространстве некоторую поверхность U= f(x1,x2) (рис. 8.1-1), низшая точка которой и дает решение задачи минимизации. Для того чтобы изобразить рельеф этой поверхности, проведем несколько плоскостей (U = const): U=c1, U=c2, U=c3 . Проекции на плоскость Ох1х2 линий пересечений этих плоскостей с поверхностью и дают линии уровня
Рис. 8.1-1
67
Для дифференцируемой функции можно определить вектор из первых частных производных, который называется градиентом grad(f(x)) :
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f(x) |
|
|||
|
|
|
|
|
|
|
x |
|
|
||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
f(x) |
|
|||
grad(f(x)) f '(x) |
(8.1-1) |
||||||||||
|
x2 |
|
|||||||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
... |
|
|
||
|
|
|
|
|
|
|
f(x) |
|
|||
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
m |
|
||
Направление вектора градиента
grad(f(x))
указывает
направление
наискорейшего возрастания функции, а его модуль (длина) равен скорости возрастания функции. Градиент нормален к линии уровня в каждой своей точке и касателен к поверхности, которую задает функция.
Вектор - grad(f(x)) называется антиградиентом и показывает направление наискорейшего убывания функции.
Равенство нулю градиента в точке Х является необходимым условием того, чтобы внутренняя для множества Хi (i = 1, 2,…m) точка Х была точкой локального минимума дифференцируемой функции f. Точка Х, для которой выполняется равенство f’(X) = 0, называется стационарной точкой функции.
Это равенство представляет собой систему из m нелинейных уравнений относительно компонент х1, х2, …, хm, вектора X, где m – количество переменных.
f(x1,x |
2,...,xm ) 0 |
|||||
|
x1 |
|
|
|
||
|
|
|
|
|||
|
|
|
|
|
|
|
|
f(x ,x |
|
,...,x |
|
) |
0 |
|
1 |
2 |
|
m |
|
|
|
x2 |
|
|
|
||
.............................. |
||||||
|
f(x1, x |
|
|
|
|
|
|
2,...,xm ) 0 |
|||||
|
xm |
|
|
|
||
|
|
|
(8.1-2) |
|||
|
|
|
|
|
|
|
Для функции двух переменных Q(x, y)это условие имеет вид:
Q(x, y) |
|
|
x |
|
|
|
Q(x, y) |
|
|
|
y |
|
|
0,
0.
(8.1-3)
Однако не всякая стационарная точка является точкой минимума. Для всякой непрерывно дифференцируемой функции f достаточным условием того,
68
чтобы стационарная точка Х была точкой локального минимума, является положительная определенность матрицы вторых производных (матрицы Гессе):
|
|
|
2 |
f |
|
|
2 |
f |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
x |
|
2 |
... |
x x |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
m |
|||||
|
|
|
2 |
f |
|
|
2 |
f |
|
|
|
|||||||
|
|
|
|
|
... |
|
|
|
|
|
||||||||
G(x) f (x) |
x |
|
|
x |
x |
|
|
x |
|
|
||||||||
|
2 |
|
2 |
m |
|
|||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
||||||||
|
|
... |
... |
|
... |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
f |
|
|
|
|
|
f |
|
|
|||||
|
|
2 |
|
|
2 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
x |
|
|
|
x |
... |
x |
|
|
x |
|
|
|||||
|
|
m |
|
m |
m |
|||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
||||||||
(8.1-4)
Согласно критерию Сильвестра, для того чтобы матрица была положительно определена, необходимо, чтобы все угловые миноры были положительны:
|
|
|
a |
a |
|
|
... |
|
a |
|
|
|
|
|||||
|
|
|
|
11 |
|
|
12 |
|
|
|
|
1m |
|
|
||||
A |
a |
21 |
a |
22 |
... |
|
a |
2m |
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
... ... ... ... |
|
|
|
||||||||||||
|
|
|
a |
m1 |
a |
m2 |
... |
a |
mm |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
1 |
a |
|
0, |
|
|
|
|
|
|
|
|
|
|
||||
|
|
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
2 |
a |
a |
22 |
a |
a |
21 |
0 |
и |
т.д. |
||||||||
|
|
|
11 |
|
|
12 |
|
|
|
|
|
|||||||
(8.1-5)
Для функции двух переменных Q(x, y) матрица Гессе имеет вид:
|
|
Q |
|
2 |
|
|
x |
|
|
|
2 |
G(x,y) |
|
Q |
|
2 |
|
|
y x |
|
|
Q |
2 |
|
x y |
|
|
Q |
2 |
|
y |
|
|
2 |
,
(8.1-6)
а достаточное условие существования минимума:
|
|
|
Q |
|
|
|
|
|
|
|
|
|||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
0, |
|
|
|
|
|
|||
1 |
|
x |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
Q |
|
|
Q |
|
|
Q |
2 |
|||
|
|
2 |
|
|
|
|
2 |
|
|
|
2 |
|
|
|
2 |
|
x |
2 |
|
y |
2 |
|
|
|
0. |
||||
|
|
|
|
|
|
x y |
|
|||||||
(8.1-7)
Алгоритм решения задачи оптимизации функции двух переменных Q(x,y) аналитическим (классическим) методом следующий:
69
1. Составляется и решается система уравнений
|
Q(x,y) |
0; |
|
|
x |
||
|
|
||
|
|
||
|
|
|
|
|
Q(x,y) |
|
|
|
0, |
||
y |
|||
|
|
||
|
|
|
из которой находятся (x*, y*)
2. Проверяются достаточные условия существования минимума
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
Q(x,y) |
0 |
|
|
|||||
|
|
|
|
|
x |
2 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
2 |
|
2 |
|
|
Q(x,y) |
|
Q(x,y) |
Q(x,y) |
|
||||||
|
x |
2 |
|
y |
2 |
|
|
x y |
|
0. |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
||||||
Если (x*, y*) – единственное решение и в этой точке выполняются достаточные условия, то это точка минимума. Если хотя бы в одном из неравенств получается знак ―<‖, то минимума не существует. В случае появления знака ―=‖ необходимо исследовать производные высших порядков.
Пример 8.1-1. Найти точку локального минимума функции.
f(x,y) = |
x2 + y2 – 4x + 100 – 8y. |
|
||||||||||||||
f |
2x |
4, |
|
|
|
|
|
|
|
|
|
|
|
|||
|
x |
|
|
2x 4 0, |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
x |
2;y |
4. |
||||||||
|
f |
|
|
|
|
|
|
2y |
|
8 0, |
||||||
|
2y |
8, |
|
|
|
|
|
|
||||||||
y |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
f |
|
|
|
|
|
f |
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
x |
2 |
2; |
y |
2 |
2; |
|
|
x y |
0. |
|
|
|||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2 |
|
0 |
, |
2 0; |
|
|
4 0 4 0. |
|
||||||||
|
|
|
|
2 |
|
|||||||||||
0 |
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Следовательно, в точке x*=2 и y*=4 функция имеет локальный минимум.
Пример 8.1-2. Найти точку локального минимума функции f(x,y)= x2+y2–4x+10xy–8y.
f |
2x 4 10y, |
|
|
|
||
|
x |
2x 4 10y 0, |
||||
|
||||||
|
|
|||||
|
f |
|
|
8 10x |
0. |
|
|
2y 8 10x, |
2y |
||||
|
y |
|
|
|
||
|
|
|
|
|
|
|
70