Пример моделирования антиблокировочной тормозной системы
.docxПример моделирования антиблокировочной тормозной системы
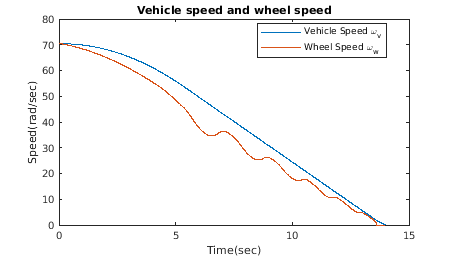
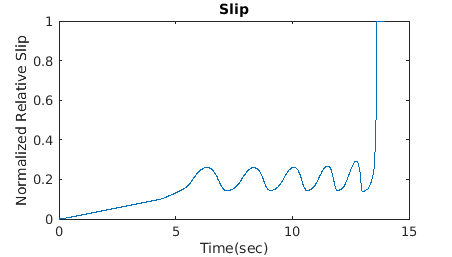
Колесо вращается с начальной угловой скоростью, которая соответствует скорости транспортного средства, прежде чем тормоза будут применены. Используются отдельные интеграторы, чтобы вычислить угловую скорость колеса и скорость транспортного средства. Две скорости используются, чтобы вычислить скольжение, которое определяется уравнением (1).
(
![]() 1)
1)
Из этих выражений мы видим, что скольжение равно нулю, когда скорость колеса и скорость транспортного средства равны, и скольжение равняется единице, когда колесо заблокировано. Оптимальным значением скольжения является 0.2, что означает, что количество оборотов колеса в 0,8 раза превышает число оборотов в режиме без торможения при той же скорости автомобиля. Это максимизирует сцепление между шиной и дорогой и сводит к минимуму тормозной путь при имеющемся трении.
Коэффициент трения между шиной и поверхностью дороги, mu, представляет собой эмпирическую функцию скольжения, известную как кривая mu-скольжения. Модель умножает коэффициент трения mu на вес колеса W, чтобы получить силу трения Ff, действующую на окружность шины. Ff делится на массу транспортного средства, чтобы получить замедление транспортного средства, которое модель интегрирует для получения скорости транспортного средства.
Ч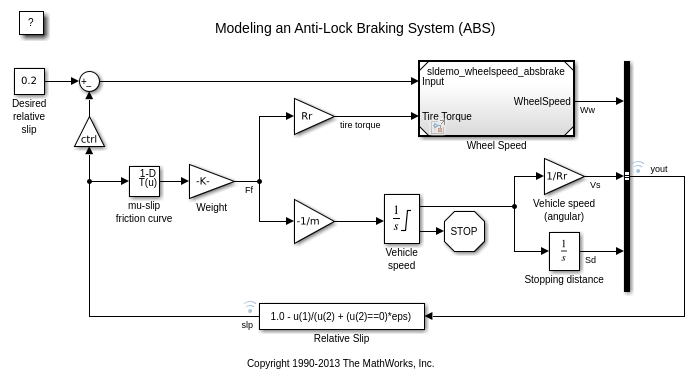
 тобы
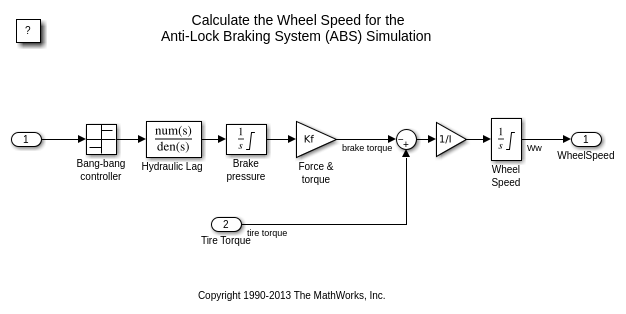
контролировать скорость изменения
тормозного давления, модель вычитает
фактическое скольжение из желаемого
скольжения и подает этот сигнал в
релейное управление (+1 или -1, в зависимости
от знака ошибки). Эта скорость
включения/выключения проходит через
задержку первого порядка, которая
представляет собой задержку, связанную
с гидравлическими линиями тормозной
системы. Затем модель интегрирует
отфильтрованную скорость, чтобы получить
фактическое тормозное давление.
Результирующий сигнал, умноженный на
площадь поршня и радиус относительно
колеса (Kf), представляет собой тормозной
момент, приложенный к колесу.
тобы
контролировать скорость изменения
тормозного давления, модель вычитает
фактическое скольжение из желаемого
скольжения и подает этот сигнал в
релейное управление (+1 или -1, в зависимости
от знака ошибки). Эта скорость
включения/выключения проходит через
задержку первого порядка, которая
представляет собой задержку, связанную
с гидравлическими линиями тормозной
системы. Затем модель интегрирует
отфильтрованную скорость, чтобы получить
фактическое тормозное давление.
Результирующий сигнал, умноженный на
площадь поршня и радиус относительно
колеса (Kf), представляет собой тормозной
момент, приложенный к колесу.
Модель умножает силу трения на колесе на радиус колеса (Rr), чтобы получить ускоряющий момент поверхности дороги на колесе. Тормозной момент вычитается, чтобы получить чистый крутящий момент на колесе. Разделив чистый крутящий момент на инерцию вращения колеса I, получим ускорение колеса, которое затем интегрируется для определения скорости колеса. Чтобы поддерживать положительную скорость колеса и скорость транспортного средства, в этой модели используются ограниченные интеграторы.