

Метод покоординатного спуска
Метод покоординатного спуска относится к методам нулевого порядка, так как его реализация не требует вычисления производных целевой функции. В этом методе в качестве направлений спуска (см. уравнение 3.2) берутся поочередно направляющие векторы координатных осей:
 ,
,
где
 .
.
Величина шага hk при каждом спуске определяется также, как и в методе наискорейшего спуска. Таким образом, траектория спуска представляет собой ломаную линию, звенья которой параллельны координатным осям (рис. 3.6, с. 56).
Алгоритм
метода представляет собой последовательность
из n
одномерных оптимизационных задач. Так
что спуск из точки k
в точку k+1
состоит из n
(по числу оптимизируемых параметров)
полушагов. Задача на каждом из полушагов
заключается в нахождении точки минимума
на одном из направлений
 :
:
 ,
где Δxj
- алгебраическое приращение j-ой
координаты, j=1,2,...,n.
,
где Δxj
- алгебраическое приращение j-ой
координаты, j=1,2,...,n.
Алгоритм метода легко программируется.
Надо
иметь в виду, что гарантия сходимости
метода дается только для дифференцируемой
функции. При отсутствии дифференцируемости
метод может остановиться в неоптимальной
точке. В качестве геометрической
иллюстрации на рис. 3.5 показано, что
спуск в направлениях
 не приводит к уменьшению значения
целевой функции и в результате итерации
преждевременно останавливаются. Это
объясняется наличием оврага, вызванного
недифференцируемостью функции. Такой
овраг, в частности, будет иметь место
при решении задачи условной минимизации
с учетом ограничений с помощью линейных
внешних штрафных функций (см. §4.3.2).
не приводит к уменьшению значения
целевой функции и в результате итерации
преждевременно останавливаются. Это
объясняется наличием оврага, вызванного
недифференцируемостью функции. Такой
овраг, в частности, будет иметь место
при решении задачи условной минимизации
с учетом ограничений с помощью линейных
внешних штрафных функций (см. §4.3.2).

Рисунок 3.5
Пример
Методом покоординатного спуска сделать несколько шагов по направлению к точке минимума целевой функции, в которой оптимальны значения минимальных температурных напоров в двух подогревателях высокого давления (ПВД) паротурбинной установки (ПТУ) К-1200-6,8/50.
Постановка
задачи оптимизации минимальных
температурных напоров
в подогревателях системы регенерации
теплоты ПТУ в общем виде описана в
параграфе 1.5. Постановка такой же
оптимизационной задачи для ПТУК-1200-6,8/50
и ее решение даны в [4]. В этой задаче в
математическом выражении целевой
функции З
(руб/год) - изменение годовых приведенных
затрат по сравнению с некоторым «базовым»
вариантом, учитывалось, что при изменении
изменяются площади теплообменной
поверхности в подогревателях и
электрическая мощность, вырабатываемая
турбогенератором. Стоимости каждого
подогревателя
 записывались в виде суммы постоянной
составляющей и переменной, значение
которой пропорционально площади
теплообменной поверхности подогревателя
F
записывались в виде суммы постоянной
составляющей и переменной, значение
которой пропорционально площади
теплообменной поверхности подогревателя
F

где
 -
удельная стоимость поверхности, i=1,2 –
номер ПВД (меньший номер для подогревателя
с наибольшим давлением греющего пара).
-
удельная стоимость поверхности, i=1,2 –
номер ПВД (меньший номер для подогревателя
с наибольшим давлением греющего пара).
Поверхность нагрева в подогревателе состоит из поверхности зоны конденсации греющего пара и поверхности зоны охлаждения конденсата.
Площадь поверхности зоны конденсации греющего пара рассчитывалась по уравнению теплопередачи:
 ,
,
где
 – тепловая мощность и коэффициент
теплопередачи в зоне конденсации
греющего пара;
– тепловая мощность и коэффициент
теплопередачи в зоне конденсации
греющего пара;
 – средний температурный напор,
рассчитываемый как среднелогарифмический.
– средний температурный напор,
рассчитываемый как среднелогарифмический.
Изменением поверхности нагрева в зоне охлаждения конденсата в рассматриваемой задаче пренебрегалось. При упрощении выражения для целевой функции использовалось правило неизменности положения точки ее минимума при прибавлении или вычитании некоторого постоянного значения.
Со всеми преобразованиями выражения для целевой функции и исходными данными можно познакомиться в [4].
Заменив
обозначение критерия оптимальности
 на Z, а обозначения оптимизируемых
переменных
на Z, а обозначения оптимизируемых
переменных
 на х1 и х2, получим следующее выражение
для целевой функции в рассматриваемой
задаче:
на х1 и х2, получим следующее выражение
для целевой функции в рассматриваемой
задаче:
 .
.
Для определения относительной величины шага вдоль какой-либо координаты применим метод квадратичной аппроксимации.
Первый полушаг метода покоординатного спуска будем реализовывать вдоль оси Х1.
Аппроксимационный полином:
 .
.
Формулы для расчета коэффициентов:
 ;
;
 ;
;
 .
.
Приравняв производную полинома по х нулю и решив уравнение относительно х, получим:
 .
.
Для решения задачи выберем начальную точку:
 .
.
Расстояние
между точками на оси Х1 для расчета
коэффициентов аппроксимационного
квадратичного полинома a0, a1, a2 примем
равным 2 ( .
.
Тогда получим:
х10=1, х11=3, х12=5;
Z0=66,459, Z1=64,611, Z2=69,523;
а0=66,459, а1=-0,924, а2=0,845;
x1ОПТ=2,55.
Теперь, приняв х1=2,55, выполним поиск x2ОПТ (второй полушаг, вдоль оси Х2).
Х20=1, х21=3, х22=5;
Z0=68,296, Z1=64,053, Z2=65,053;
а0=68,296, а1=-2,122, а2=0,655;
x2ОПТ=3,62.
Завершен 1 шаг метода покоординатного спуска.
На
втором шаге уменьшим расстояние между
точками, выбранными для построения
аппроксимационного полинома в два раза
( ).
).
Первый полушаг второго шага:
х2=3,62;
х10=1,55, х11=2,55, х12=3,55;
Z0=64,439, Z1=64,106, Z2=65,694;
а0=64,439, а1=-0,333, а2=0,961;
x1ОПТ=2,22.
Второй полушаг второго шага:
х1=2,22;
Х20=2,62, х21=3,62, х22=4,62;
Z0=64,014, Z1=63,921, Z2=64,523;
а0=64,014, а1=-0,093, а2=0,347;
x2ОПТ=3,25.
Завершен 2 шаг метода покоординатного спуска.
На
третьем шаге уменьшим расстояние между
точками, выбранными для построения
аппроксимационного полинома еще в два
раза ( ).
).
Первый полушаг третьего шага:
х2=3,25;
х10=1,72, х11=2,22, х12=2,75;
Z0=64,089, Z1=63,851, Z2=64,211;
а0=64,089, а1=-0,476, а2=1,196;
x1ОПТ=2,17.
Второй полушаг третьего шага:
х1=2,17;
Х20=2,75, х21=3,25, х22=3,75;
Z0=63,937, Z1=63,843, Z2=63,96;
а0=63,937, а1=-0,188, а2=0,422;
x2ОПТ=3,22.
Итак, после трех шагов метода покоординатного спуска получили оптимальные значения температурных наборов:
 .
.
График пошагового спуска для данного примера представлен на рисунке 3.6.
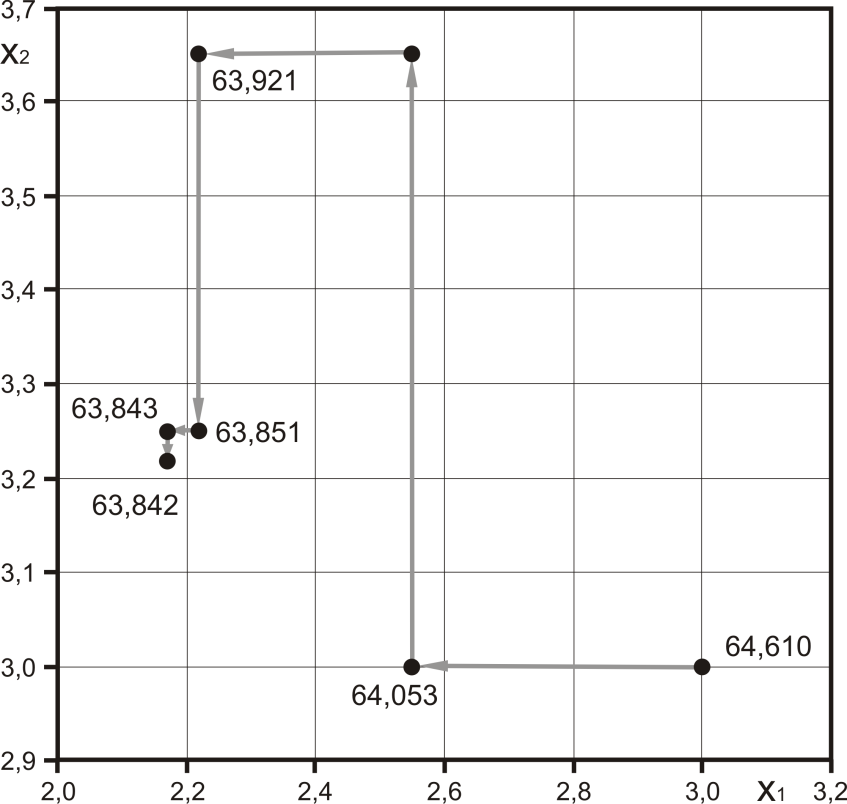
Рисунок 3.6