

5 Моделирование в системе matlab
5.1 Теоретические расчеты
РП для знакового алгоритма выглядит следующим образом:

где

Общий вид характеристики представлен на рисунке 5.1.
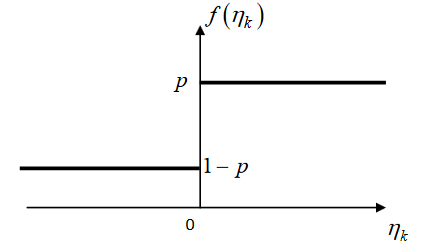
Рисунок
5.1Характеристика
СВ

Так
как распределение
 является нормальным, то необходимо
найти только математические ожидания
и дисперсии для обеих гипотез.
является нормальным, то необходимо
найти только математические ожидания
и дисперсии для обеих гипотез.









В
силу независимости СВ ,
,
где i= 0,1.
При
 из чего можно сделать вывод о том, что
при увеличении степени случайности
сигнала характеристика обнаружения
будет полностью теряться в шумах.
Тогда
вероятность ложной тревоги будет равна
из чего можно сделать вывод о том, что
при увеличении степени случайности
сигнала характеристика обнаружения
будет полностью теряться в шумах.
Тогда
вероятность ложной тревоги будет равна

 (
5.6)
(
5.6)
А вероятность правильного обнаружения:


Далее будет реализовано моделирование по этому алгоритму.
Параметры начальных условий
Параметры, которые были использованы при построении характеристик в приложении Б:
- вероятность ложной тревоги – 0,05.
- максимальное отношение сигнал - шум – 30.
- шаг отношения сигнал- шум – 0,1.
- количество импульсов –100.
Листинг программы предоставлен в приложении А , характеристики обнаружения построены в приложении Б.
Выводы:
Из графика видно, что обнаружение сильно
ухудшается при увеличении степени
случайности сигнала, а при
 = 0,5 сигнал невозможно обнаружить.
= 0,5 сигнал невозможно обнаружить.
Заключение
В данной дипломной работе разобраны основные принципы цифровой обработки сигналов в РЛС систем автоматического сопровождения воздушных объектов. В ходе дипломной работы было выполнено построение модели характеристик обнаружения при разной степени случайности сигнала, в системе MATLAB. Представленная дипломная работа преследовала цель анализа принципов цифровой обработки сигналов в РЛС систем автоматического сопровождения воздушных объектов, а также выявление достоинств и недостатков по сравнению с аналоговой обработкой
В данной работе были рассмотрены: основные принципы обработки радиолокационной информации в РЛС автоматического сопровождения воздушных объектов, принципы построения устройств преобразования радиолокационных сигналов в цифровую форму, принцип построения цифровых обнаружителей радиолокационных сигналов, цифровые измерители координат воздушных объектов. В конце работы было произведено моделирование характеристик обнаружения в системе MATLAB.
Хотелось бы отметить, что представленный вариант анализа основных принципов цифровой обработки сигналов в РЛС систем автоматического сопровождения воздушных объектов не является единственным и окончательным, но может дать почву для продолжения работ по созданию систем обнаружения и сопровождения воздушных объектов.
Литература
Панасюк Ю.Н., А. П. Пудовкин. Обработка радиолокационной информации в радиотехнических системах. Тамбов: ФГБОУ ВПО «ТГТУ», 2016 г.; 84 с.
Дудник П.И. Авиационные радиолокационные комплексы и системы. ВВИА им. проф. Н.Е. Жуковского, 2006 г.; 1112с.
Тяпкин В.Н. Эксплуатация и ремонт радиолокационных комплексов противовоздушной обороны Военно-воздушных сил. Издание СФУ УДК 621.396.96, 1996 г.; 369с.
Бердышев В.П. , Е. Н. Гарин, А. Н. Фомин; Под общ. ред. В. П. Бердышева. Радиолокационные системы. Красноярск: Сиб. федер. унт., 2011.; 400 с.
Пятко С.Г. и А.И. Красова. Автоматизированные системы управления воздушным движением: Новые информационные технологии в авиации. Санкт-Петербург: Политехника, 2004г.; 446 с.
Федоров С.М., В.М. Кейн, О.И. Михайлов, Н.Н. Сухих Автоматизированное управление самолетам и вертолетами. Минск: Транспорт, 1992 г.; 266с.
Савицкий В.И., В.А. Василенко, Ю.А. Владимиров, В.В. Точилов. Автоматизированные системы управления воздушным движением. Минск: Транспорт, 1980г.; 357 с.
Бруханский А.В. Системы селекции движущихся целей . Москва: МАИ, 1990г.; 65 c.
Черняк В.С. Многопозиционная радиолокация. Москва: Радио и связь, 1993 г.; 416 с.
Завизион Н.Н. Техническая эксплуатация радиоэлектронного оборудования. Дипломное проектирование. Минск: МГВАК, 2010 г.; 97 с.