

Работа 3ml. Исследование импульсных регуляторов скорости вращения двигателей постоянного тока
Цель работы
Исследование переходных процессов в замкнутой системе автоматического регулирования скорости вращения двигателей постоянного тока (ДПТ) с импульсным регулятором.
Методические указания
Изучите рекомендации по разработке и исследованию математических моделей электрических цепей и машин в среде Matlab/Simulink (см. Приложение).
Содержание работы
Исследование переходного процесса при пуске ДПТ с импульсным регулятором скорости вращения и заданных значениях скорости вращения, момента сопротивления движению и максимально допустимого тока якоря.
Исследование переходного процесса в замкнутой системе автоматического регулирования скорости вращения ДПТ с импульсным регулятором при изменении момента сопротивления движению.
Исследование переходного процесса в замкнутой системе автоматического регулирования скорости вращения ДПТ с импульсным регулятором при увеличении заданной скорости вращения.
Описание модели
Откройте окно MatLab, нажмите File/Open, откройте папку work/3ML, найдите и откройте файл psb_3ml (рис. 3.1).
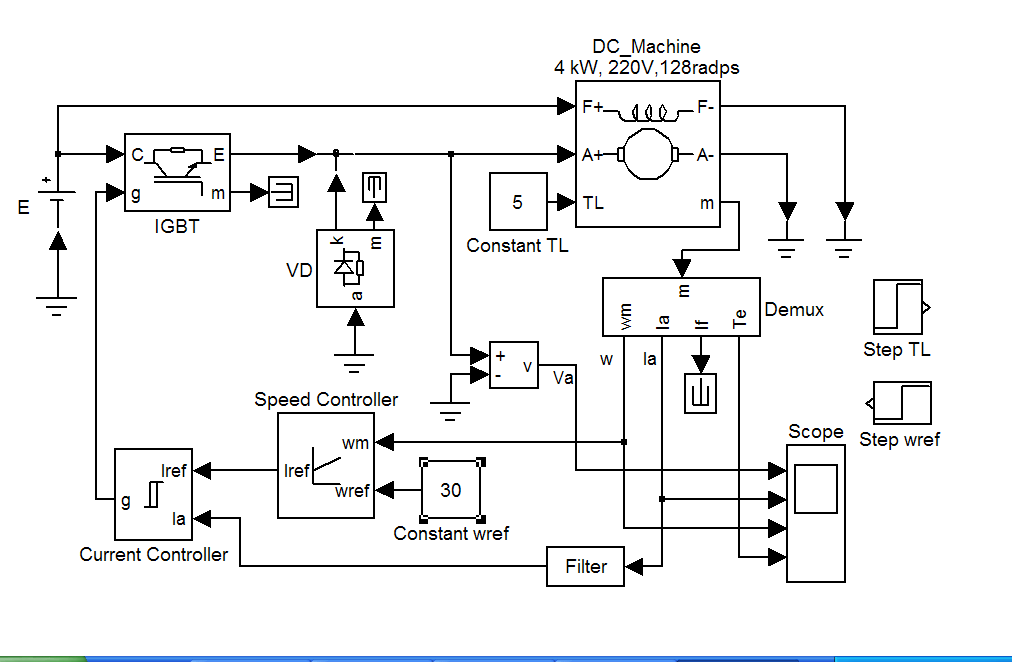
Рис.3.1. Схема модели импульсного регулятора скорости вращения ДПТ
Модель замкнутой системы автоматического регулирования скорости вращения ДПТ с импульсным регулятором содержит следующие блоки из библиотек Simulink и SimPowerSystem:
блок DC Machine с обмоткой якоря +А, -А , обмоткой возбуждения +F, -F, входом TL ввода момента сопротивления движению и выходом т вывода результатов моделирования из SimPowerSystem/Machine;
источник постоянного напряжения DC Voltage Sourse (E) для питания обмотки якоря и обмотки возбуждения ДПТ из SimPowerSystem/Electrical Sources;
исполнительный орган импульсного регулятора скорости IGBT и защитный диод VD из SimPowerSystem/Power Electronic;
заземлитель Ground из Simulink/SimPowerSystems/Connectors;
блоки Constant TL и Step TL генерации постоянного и ступенчатого сигнала момента сопротивления движению из Simulink/Sources;
блоки Constant wref и Step wref генерации постоянного и ступенчатого сигнала заданной скорости вращения из Simulink/Sources;
блок Demux из SimPowerSystem/Machines для разделения результатов моделирования машин и вывода текущих значений скорости вращения ротора ω, тока якоря ia и электромагнитного момента на валу двигателя Te .
блок Voltage Measurement из SimPowerSystem/Measurements для измерения мгновенного значения напряжения обмотки якоря ua;
блок Scope для наблюдения мгновенных значений напряжения обмотки якоря ua, тока якоря ia , скорости вращения ротора ω и электромагнитного момента на валу двигателя Te .
блок управления скоростью ДТП Speed Controller, сравнивающий на входах фактическую скорость вращения ωm с заданной ωref и вырабатывающий на выходе заданный ток якоря iref ;
блок управления током якоря Current Controller, сравнивающий на входах фактическое значение тока обмотки якоря ia с заданным iref и вырабатывающий на выходе сигналы управления ключом IGBT.
Исследование переходного процесса при пуске ДПТ и заданных значениях скорости вращения, момента сопротивления движению и максимально допустимого тока якоря.
Откройте таблицу параметров DC Machine и установите их в соответствии с данными Примера в работе psb_2ML (табл.3.1).
Таблица 3.1. Параметры DC Machine
|
номинальная мощность Pn, Вт |
4000 |
|
номинальное напряжение обмотки якоря Un, В |
220 |
|
номинальная скорость вращения якоря nn, об/мин |
1222 |
|
номинальный кпд ηn, о.е. |
0.9 |
|
номинальный ток якоря Ia n , A |
20.2 |
|
номинальная угловая скорость вращения ωn , рад/с |
127.96 |
|
номинальный электромагнитный момент Te.n, Н*м |
31.26 |
|
номинальный момент сопротивления движению TL.n, Н*м |
28.13 |
|
активное сопротивление цепи якоря Ra, Ом |
0.6 |
|
индуктивность цепи якоря La, Гн |
0.012 |
|
активное сопротивление цепи возбуждения Rf, Ом |
240 |
|
индуктивность цепи возбуждения Lf, Гн |
120 |
|
взаимная индуктивность между цепью якоря и цепью возбуждения двигателя Laf, Гн |
1.8 |
|
момент инерции двигателя J, (кг*м^2) |
0.1 |
|
коэффициент вязкого трения Bm, (Н*м*с) |
0.021 |
|
сoulomb friction torque Tf, (Н*м) |
0.2 |
Установите режим работы модели:
напряжение источника питания E=180+10*N,
момент сопротивления движению TL1 =5+N, (задайте в блоке Constant TL),
скорость вращения ДПТ ωref1 = 30+N (задайте в блоке Constant wref),
максимально допустимое значение тока якоря ILim =30+2*N (задайте в блоке Speed Controller),
диапазон изменения тока якоря IГист =2+0,5*N (задайте в блоке Hysteresis Current Controller).
Войдите в окно Simulation/ Simulation parameter, установите время начала моделирования 0 , конца моделирования 0.6, способ моделирования - с переменным шагом, метод расчета – ode 15s и запустите моделирование ►.
После завершения процесса откройте осциллоскоп Scope, включите «Автомасштаб» и убедитесь в том, что импульсный регулятор скорости обеспечивает плавный пуск ДПТ с ограничением пускового тока на заданном уровне и разгон ДПТ при неизменной нагрузке до заданной скорости (рис.3.2,а). При необходимости скорректируйте параметры блоков Speed Controller и Current Controller.


а) б)
Рис.3.2. Осциллограммы переходного процесса при пуске ДПТ
(Е=180 В, TL1 =5 Нм, ωref1=30 s-1, ILim = 30 A; IГист =2 A)
Нажмите кнопку «увеличить ось Х» и выделите часть осциллограммы в установившемся режиме работы 0.5<t<0.6, растяните шкалу времени так, чтобы видеть два-три периода работы регулятора. Нажмите кнопку «увеличить ось Y» и растяните осциллограммы по оси Y на все окно (рис.3.2,б).
При пуске скорость вращения ДПТ меньше заданной ωref1. Обмотка якоря получает питание от источника Е через включенный IGBT до тех пор, пока ток якоря не увеличится до заданного значения тока ограничения ILim. При этом блок Speed Controller дает команду на отключение IGBT и отключение обмотки якоря от источника Е. Ток обмотки якоря за счет энергии магнитного поля сохраняется и продолжает протекать через диод VD. При уменьшении тока якоря на IГист блок Current Controller включает IGBT и процесс повторяется. Регулятор скорости работает в импульсном режиме, отключая IGBT и обмотку якоря от источника Е при
Iа ≥ ILim и вновь включая IGBT при Iа ≤ ILim - IГист.
После разгона ДПТ до скорости большей заданной ωref1 блок Speed Controller вырабатывает новое значение тока ограничения Iref1, соответствующее заданной скорости ωref1 и заданному моменту нагрузки TL1. Регулятор скорости работает в импульсном режиме, отключая IGBT и обмотку якоря от источника Е при Iа ≥ Iref1 и вновь включая IGBT при
Iа <Iref1-IГист.
Перерисуйте осциллограммы ua(t), ia(t), ω(t), Te(t) на бланк. Определите минимальное, максимальное и среднее значения электромагнитного момента, минимальное, максимальное и среднее значения тока якоря, ток возбуждения, время пуска, время включенного состояния IGBT (длительность импульса ti), время отключенного состояния IGBT (длительность паузы tp), частоту работы регулятора f=1/( ti+ tp).
Рассчитайте для установившегося режима работы мощность потребляемую от источника питания P1=E*(Ia ср+IF)*ti/(ti+tp), мощность на валу двигателя P2 = Te ср *ω и кпд двигателя с импульсным регулятором
η =P2/P1 Результаты моделирования поместите в табл. 3.2.
Таблица 3.2. Результаты моделирования переходного процесса при пуске ДПТ.
|
Результаты моделирования для интервала времени: |
0.5<t<0.6 | ||
|
Te мин ,Te макс, Te ср= (Te мин +Te макс)/2, Н·м |
|
|
|
|
Ia мин , Ia макс , Ia ср = (Ia мин + Ia макс)/2 A |
|
|
|
|
IF = E/RF A |
| ||
|
Длительность пуска tП , ………………… c |
| ||
|
Длительность импульса ti , c |
| ||
|
Длительность паузы tp , c |
| ||
|
Частота работы регулятора 1/( ti+ tp), с-1 |
| ||
|
Мощность потребляемая P1=E*(Ia ср+IF)*ti/(ti+tp), Вт |
| ||
|
Мощность на валу двигателя P2 = Te ср *ω, Вт |
| ||
|
Кпд двигателя с импульсным регулятором η =P2/P1 |
| ||
Исследование переходного процесса в замкнутой системе автоматического регулирования скорости вращения ДПТ с импульсным регулятором при изменении момента сопротивления движению
Замените блок задания момента сопротивления движению Constant TL на блок Step TL и задайте его параметры:
время шага 0.6,
начальное значение TL1= 5+N,
окончательное значение TL2= 20+N.
Войдите в окно Simulation/ Simulation parameter, установите время начала моделирования 0 , конца моделирования 0.6, способ моделирования - с переменным шагом, метод расчета – ode 15s и запустите моделирование ►.
На интервале времени 0<t<0.6 переходный процесс протекает аналогично п.1, но через время шага 0.6 с блок Step TL скачком увеличит заданный момент сопротивления движению с начального значения TL1 =5+N до окончательного значения TL2 =20+N.
Перерисуйте осциллограммы переходного процесса для интервала времени 0.5<t<1.2 на бланк (рис.3.3,а).
Нажмите кнопку «увеличить ось Х» блока Scope и выделите части осциллограмм в установившемся режиме работы (1.1<t<1.2), растяните шкалу времени так, чтобы видеть два-три периода работы регулятора (рис.3.3,б).


а) б)
Рис.3.3. Осциллограммы переходных процессов при пуске и увеличении момента нагрузки ДПТ
При увеличении момента сопротивления движению скорость вращения ДПТ уменьшается wm<wref1 и блок Speed Controller вырабатывает новое значение тока ограничения Iref2, соответствующее заданной скорости ωref1 и заданному моменту сопротивления движению TL2. Регулятор скорости восстанавливает заданное значение скорости вращения ωref1, отключая IGBT и обмотку якоря от источника Е при Iа ≥ Iref2 и вновь включая IGBT при Iа < Iref2 - IГист .
Перерисуйте осциллограммы ua(t), ia(t), ω(t), Te(t) на бланк. Определите минимальное, максимальное и среднее значения электромагнитного момента, минимальное, максимальное и среднее значения тока якоря, ток возбуждения, время регулирования, время включенного состояния IGBT (длительность импульса ti), время отключенного состояния IGBT (длительность паузы tp), частоту работы регулятора f=1/( ti+ tp).
Рассчитайте для установившегося режима работы мощность потребляемую от источника питания P1=E*(Ia ср+IF)*ti/(ti+tp), мощность на валу двигателя P2 = Te ср *ω и кпд двигателя с импульсным регулятором
η =P2/P1 Результаты моделирования поместите в табл. 3.3.
Таблица 3.3. Результаты моделирования переходного процесса при увеличении момента сопротивления движению ДПТ
|
.Результаты моделирования для интервала времени: |
1.1<t<1.2 | ||
|
Te мин ,Te макс, Te ср= (Te мин +Te макс)/2, Н·м |
|
|
|
|
Ia мин , Ia макс , Ia ср = (Ia мин + Ia макс)/2 A |
|
|
|
|
IF = E/RF A |
| ||
|
Длительность переходного процесса tПП ,…… c |
| ||
|
Длительность импульса ti , c |
| ||
|
Длительность паузы tp , c |
| ||
|
Частота работы регулятора 1/( ti+ tp), с-1 |
| ||
|
Мощность потребляемая P1=E*(Ia ср+IF)*ti/(ti+tp), Вт |
| ||
|
Мощность на валу двигателя P2 = Te ср *ω, Вт |
| ||
|
Кпд двигателя с импульсным регулятором η =P2/P1 |
| ||
Исследование переходного процесса в замкнутой системе автоматического регулирования скорости вращения ДПТ с импульсным регулятором при увеличении заданной скорости вращения
Замените блок задания скорости вращения Constant ωref на Step ωref и задайте его параметры:
время шага 1.2,
начальное значение ωref1= 30+N,
окончательное значение ωref2 = 80+N.
Войдите в окно Simulation/ Simulation parameter, установите время начала моделирования 0 , конца моделирования 2, способ моделирования - с переменным шагом, метод расчета – ode 15s и запустите моделирование ►.
На интервале времени 0<t<1.2 переходный процесс протекает аналогично п.1, п.2, но через время 1.2 с блок задания скорости вращения Step ωref скачком увеличит заданную скорость вращения с начального значения ωref1 = 30+N до окончательного значения ωref2 = 80+N .
Перерисуйте осциллограммы переходного процесса для интервала времени 1< t <2 на бланк (рис.3.4,а).
Нажмите кнопку «увеличить ось Х» блока Scope и выделите части осциллограмм в установившемся режиме работы (1.7<t<1.8), растяните шкалу времени так, чтобы видеть два-три периода работы регулятора (рис.3.4,б).
При увеличении заданной скорости вращения до ωref2 фактическая скорость вращения ДПТ ωm меньше заданной. Обмотка якоря получает питание от источника Е через включенный IGBT до тех пор, пока ток якоря не увеличится до заданного значения тока ограничения ILim. Регулятор скорости работает в импульсном режиме, отключая IGBT и обмотку якоря от источника Е при Iа ≥ ILim и вновь включая IGBT при Iа ≤ ILim - IГист.
После разгона ДПТ до скорости большей заданной ωref2 блок Speed Controller вырабатывает новое значение тока ограничения Iref3, соответствующее заданной скорости ωref2 и заданному моменту нагрузки TL2. Регулятор скорости работает в импульсном режиме, отключая IGBT и обмотку якоря от источника Е при Iа ≥ Iref3 и вновь включая IGBT при
Iа < Iref3 - IГист.


а) б)
Рис.3.4. Осциллограммы переходных процессов при пуске, увеличении момента нагрузки и увеличении заданной скорости вращения ДПТ
Перерисуйте осциллограммы ua(t), ia(t), ω(t), Te(t) на бланк. Определите минимальное, максимальное и среднее значения электромагнитного момента, минимальное, максимальное и среднее значения тока якоря, ток возбуждения, время регулирования, время включенного состояния IGBT (длительность импульса ti), время отключенного состояния IGBT (длительность паузы tp), частоту работы регулятора f=1/( ti+ tp).
Рассчитайте для установившегося режима работы мощность потребляемую от источника питания P1=E*(Ia ср+IF)*ti/(ti+tp), мощность на валу двигателя P2 = Te ср *ω и кпд двигателя с импульсным регулятором
η =P2/P1
Результаты моделирования поместите в табл. 3.4.
Таблица 3.4. Результаты моделирования переходного процесса при увеличении заданной скорости вращения ДПТ
.
|
Результаты моделирования для интервала времени: |
1.9<t<2 | ||
|
Te мин ,Te макс, Te ср= (Te мин +Te макс)/2, Н·м |
|
|
|
|
Ia мин , Ia макс , Ia ср = (Ia мин + Ia макс)/2 A |
|
|
|
|
IF = E/RF A |
| ||
|
Длительность переходного процесса tПП , c |
| ||
|
Длительность импульса ti , c |
| ||
|
Длительность паузы tp , c |
| ||
|
Частота работы регулятора 1/( ti+ tp), с-1 |
| ||
|
Мощность потребляемая P1, Вт |
| ||
|
Мощность на валу двигателя P2, Вт |
| ||
|
Кпд двигателя с импульсным регулятором η |
| ||