

По результатам моделирования (ток нагрузки ir2 и напряжение нагрузки ur2) рассчитайте в окне команд MatLab:
мощность нагрузки PR2= IR2 * UR2,
мощность источника PЕ= IR2 * Е,
коэффициент полезного действия цепи kpd= PR2/ PЕ.
Постройте графики зависимостей напряжения нагрузки UR2, мощности нагрузки PR2 и kpd от тока источника I=IR2 и убедитесь в том, что максимум мощности нагрузки соответствует режиму согласованной нагрузки, когда сопротивление нагрузки равно внутреннему сопротивлению источника.
Работа 2мL. Исследование двигателей постоянного тока с независимым возбуждением
Цель работы
Исследование механических, пусковых и рабочих характеристик двигателей постоянного тока (ДПТ) с независимым возбуждением.
Методические указания
Изучите рекомендации по разработке и исследованию математических моделей электрических цепей и машин в среде Matlab/Simulink (см. Приложение).
Содержание работы
Исследование режима пуска ДПТ со ступенчатым регулированием сопротивления в цепи якоря.
Исследование механических и рабочих характеристик ДПТ:
при номинальных значениях напряжения в цепях якоря и возбуждения;
при пониженных значениях напряжения в цепи якоря;
при пониженных значениях напряжения в цепи возбуждения;
при введении в цепь якоря дополнительных сопротивлений.
Описание модели
Откройте окно MatLab, нажмите File/Open, откройте папку work/2ML, найдите и откройте файл psb_2ml.
Модель ДПТ с устройством ограничения пускового тока (рис. 2.1) содержит следующие блоки из библиотек Simulink и SimPowerSystem:
блок DC Machine с обмоткой якоря +А, -А , обмоткой возбуждения +F, -F, входом TL ввода момента сопротивления движению и выходом т вывода результатов моделирования из SimPowerSystem/Machine;
источник постоянного напряжения DC Voltage Sourse (E) для питания обмотки якоря ДПТ из SimPowerSystem/Electrical Sources;
источник постоянного напряжения DC Voltage Sourse (Ef) для питания обмотки возбуждения ДПТ из SimPowerSystem/Electrical Sources;
заземлители Ground (input) и Ground (output) из Simulink /SimPowerSystems / Connectors;
блок Constant генерации постоянного сигнала из Simulink/Sourses;
блок Demux для разделения результатов моделирования машин из SimPowerSystem/ Mashines;
блок Scope для наблюдения мгновенных значений тока якоря Ia, угловой скорости двигателя w и электромагнитного момента Te из Simulink/Sinks;
блоки для регистрации установившихся значений тока якоря Ia, угловой скорости двигателя w, тока возбуждения If и электромагнитного момента Te из Simulink/Sinks/ Display;
блок графопостроителя XY- Graph функции w(Ia)-пусковой характеристики.
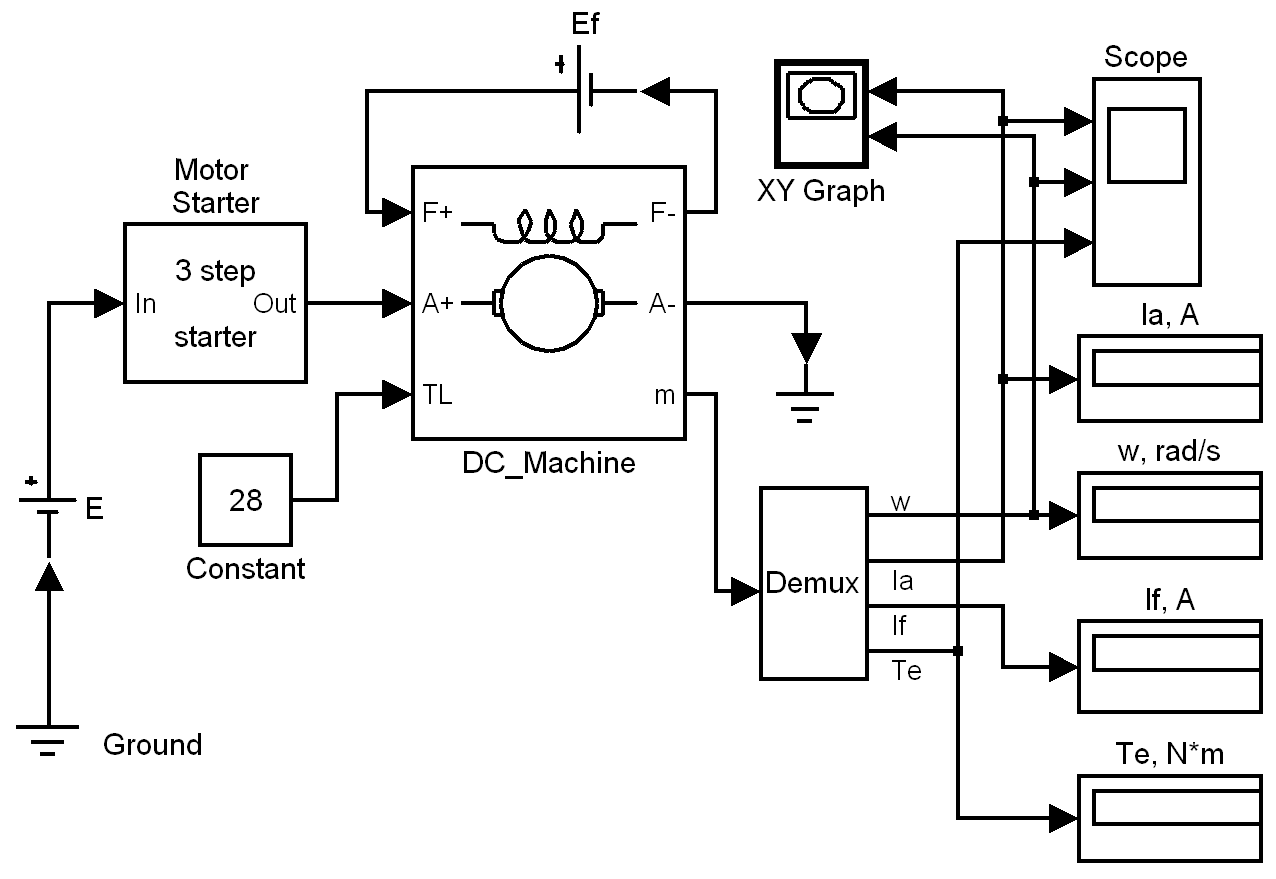
Рис.2.1. Схема модели ДПТ с устройством ограничения пускового тока
Устройство ограничения пускового тока Motor Starter (рис.2.2) представлено подсистемой, содержащей:
резисторы R1, R2, R3 из Simulink /SimPowerSystems / Elements/Series RLC Branch; три ключа Breaker1, Breaker2, Breaker3 из Simulink/SimPowerSystems/Elements и три блока управления ключами Step1 – Step3 из Simulink/Sources.

Рис.2.2. Схема модели устройства ограничения пускового тока Motor Starter
Подготовка модели к выполнению исследований
Объект исследования –двигатель постоянного тока с независимым возбуждением серии 2ПН.
Номинальные параметры исследуемых ДПТ по данным каталога приведены в табл. 2.1:
Pn, номинальная мощность (Вт);
Un, номинальное напряжение обмотки якоря (В);
nn, номинальная скорость вращения якоря (об/мин),
ηn, номинальный кпд;
Пмех , общие механические потери машины.
Параметры модели DC Motor в MatLab включают:
Rя ,Ra - активное сопротивление цепи якоря;
Lя , La - индуктивность цепи якоря;
RВ , Rf - активное сопротивление цепи возбуждения;
Lf - индуктивность цепи возбуждения;
Laf - взаимная индуктивность между цепью якоря и цепью возбуждения двигателя;
J - момент инерции двигателя ;
Bm - коэффициент вязкого трения;
Tf – момент сопротивления трению.
Параметры модели DC Motor рассчитаны [3], [7] по данным каталога ДПТ и помещены в табл.2.1.
Откройте таблицу параметров DC Motor на модели и установите параметры Вашего ДПТ в соответствии с заданным вариантом.
Таблица 2.1. Параметры модели DC Motor
|
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Двигатель |
2ПН-100М |
2ПН-112М |
2ПН-112М |
2ПН-160М |
2ПН-160М |
2ПН-180М |
2ПН-180М |
|
|
|
Каталожные данные двигателей |
|
| |||
|
Pn, кВт |
2.00 |
3.60 |
7 |
10.50 |
13 |
15 |
26 |
|
Un, В |
220 |
220 |
220 |
220 |
220 |
220 |
220 |
|
nn, об/мин |
3000 |
3000 |
3000 |
3000 |
2120 |
1500 |
3000 |
|
, % |
79 |
79 |
83 |
84 |
85.5 |
85.5 |
89.5 |
|
Rя, Ом |
0.805 |
0.42 |
0.226 |
0.906 |
0.081 |
0.084 |
0.022 |
|
Rв, Ом |
73 |
33.6 |
111 |
111 |
61.5 |
55.5 |
55.5 |
|
Iян, А |
11.51 |
20.71 |
38.34 |
56.82 |
69.11 |
79.74 |
132.05 |
|
Iв, А |
3.01 |
6.55 |
1.98 |
1.98 |
3.58 |
3.96 |
3.96 |
|
Lя, Гн |
0.026 |
0.0048 |
0.0046 |
0.0028 |
0.0022 |
0.0027 |
0.00068 |
|
J, кг m^2 |
0.011 |
0.017 |
0.037 |
0.037 |
0.083 |
0.2 |
0.2 |
|
Параметры модели | |||||||
|
Ra, Ом |
0.805 |
0.42 |
0.226 |
0.906 |
0.081 |
0.084 |
0.022 |
|
La, Гн |
0.026 |
0.0048 |
0.0046 |
0.0028 |
0.0022 |
0.0027 |
0.00068 |
|
Rf, Ом |
73 |
33,6 |
111 |
111 |
61,5 |
55,5 |
55,5 |
|
Lf, Гн |
11.79 |
1.92 |
11.30 |
1.72 |
8.35 |
8.92 |
8.58 |
|
Laf, Гн |
0.18 |
0.08 |
0.29 |
0.30 |
0.24 |
0.30 |
0.16 |
|
J, кг m2 |
0.011 |
0.017 |
0.037 |
0.037 |
0.083 |
0.2 |
0.2 |
|
Bm, Н.м.с |
1.01E-07 |
1.83E-07 |
3.55E-07 |
5.32E-07 |
1.32E-06 |
3.04E-06 |
1,32E-06 |
|
Tf, Нм |
3,18E-05 |
5,73E-05 |
1,11E-04 |
1,67E-04 |
2,93E-04 |
4,78E-04 |
4.14E-04 |
|
н, рад/с |
314 |
314 |
314 |
314 |
222 |
157 |
314 |
|
Ten, Нм |
6.37 |
11.46 |
22.29 |
33.44 |
58.59 |
95.54 |
82.80 |
|
TLn, Нм |
5.03 |
9.06 |
18.50 |
28.09 |
50.09 |
81.69 |
74.11 |
|
Rд, Ом |
8.75 |
4.89 |
2.64 |
1.03 |
1.51 |
1.30 |
0.81 |