

Лаб 4
.docxМинистерство цифрового развития, связи и массовых коммуникаций РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ
УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ТЕЛЕКОММУНИКАЦИЙ ИМ. ПРОФ. М.А. БОНЧ-БРУЕВИЧА»
(СПбГУТ)

Факультет «Информационные системы и технологии»
Кафедра «Информационных управляющих систем»
ЛАБОРАТОРНАЯ РАБОТА № 4
по дисциплине:
Моделирование процессов и систем
на тему:
«Моделирование интеллектуальной системы манипулятора»
Выполнил студент группы ИСТ-112:
Медведева С.Г.
Фамилия И. О.
Проверяющий:
Косов Павел Валерьевич
дата, подпись Фамилия И. О.
Санкт-Петербург
2023
Цель работы
Расчет параметров и моделирование интеллектуальной системы манипулятора.
Ход работы
Для дальнейшего выполнения работы будем использовать формулы и указания, приведенные в методических указаниях к данной работе.
Задние 1. Ознакомиться с техническим описанием интеллектуальной системы робота.
Техническое описание - Математическая модель манипулятора учитывает кинематические связи, динамические взаимодействия инерционных, центробежных, кориолисовых и гравитационных моментов, внешние моменты исполнительных механизмов. В исполнительных устройствах используются двигатели постоянного и переменного токов. При построении математической модели приняты следующие допущения: отсутствуют люфты между валами двигателей и звеньями манипулятора; отсутствуют упругие деформации в приводах, передаточных механизмах и звеньях манипулятора; ошибки квантования на выходе цифровых систем управления электроприводами незначительны.
Задание 2. Составить математическую модель интеллектуальной системы робота. Рассчитать систему управления в соответствии с вариантом задания (табл. 4.1, 4.2).
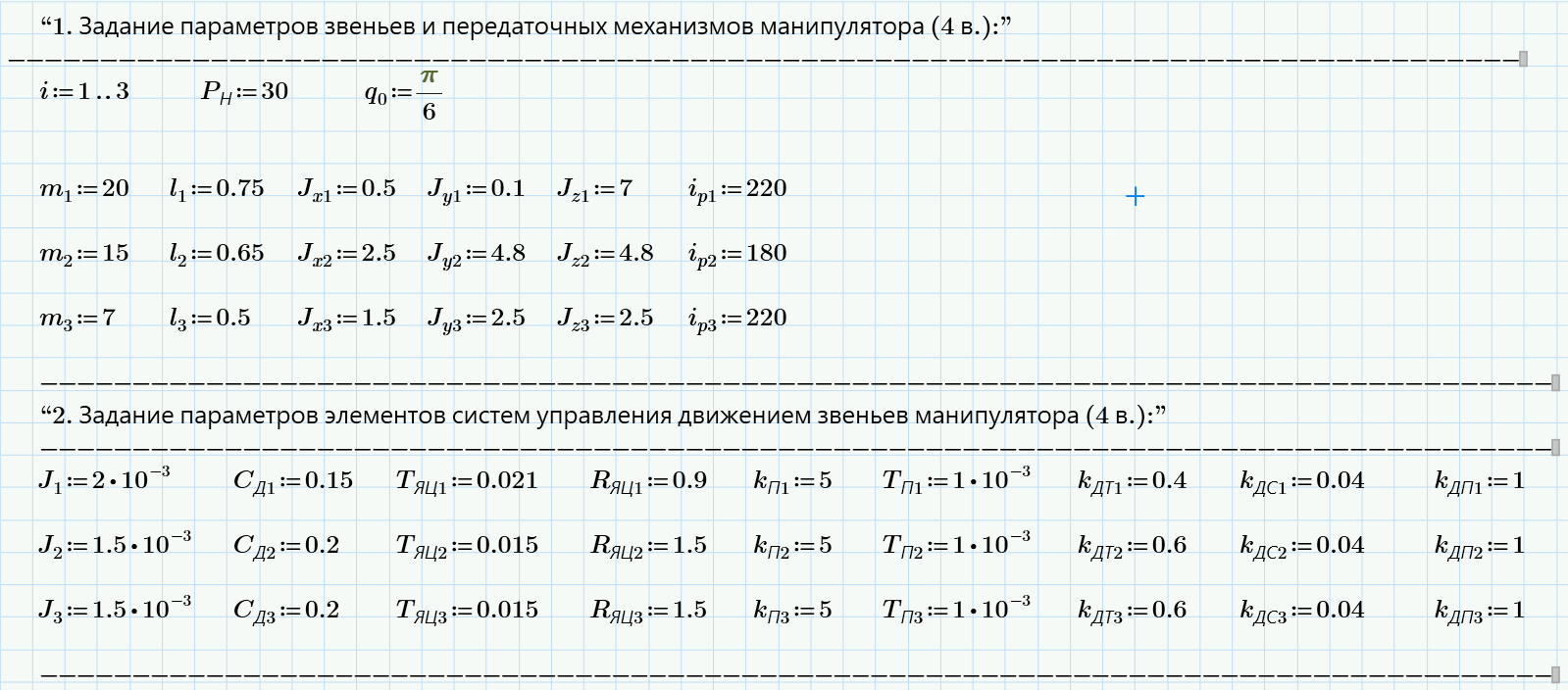
Рисунок 1 – инициализация начальных параметров.
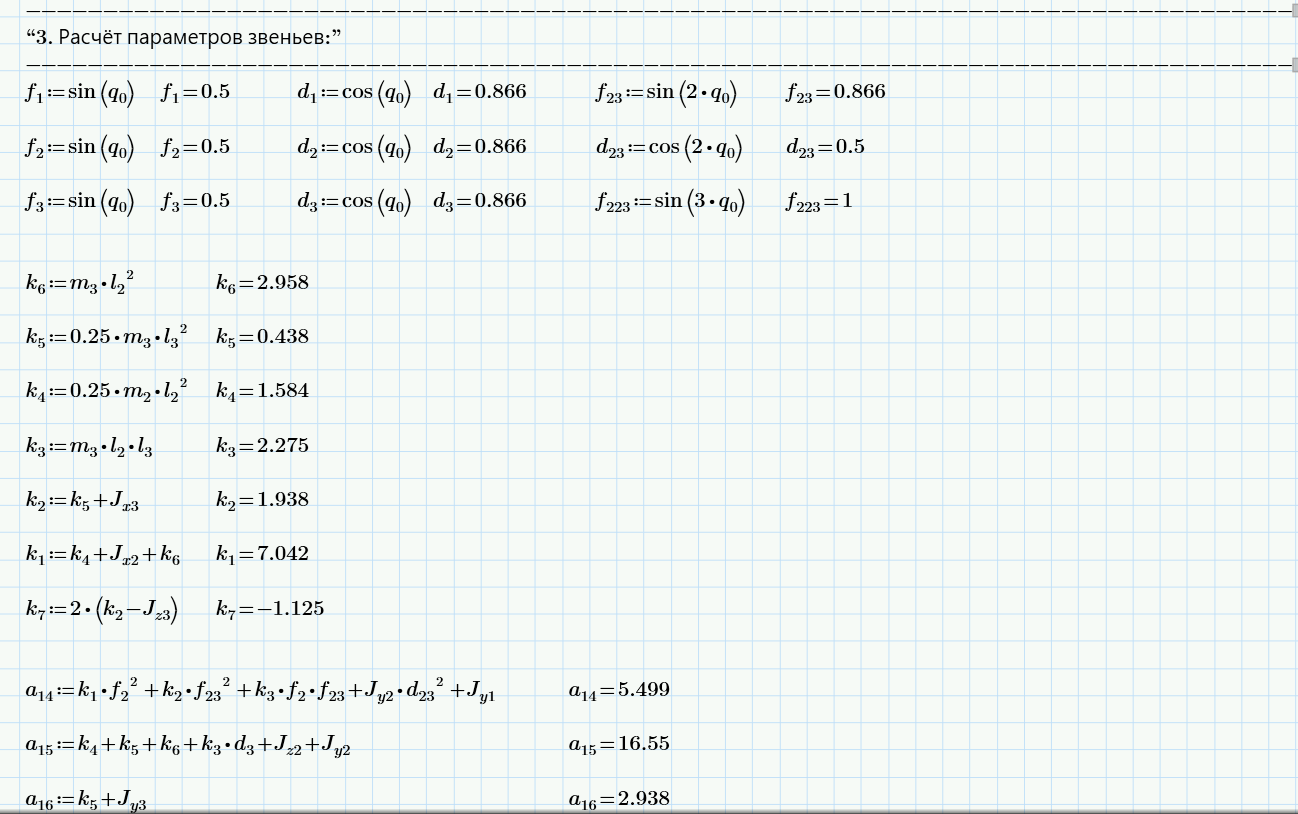
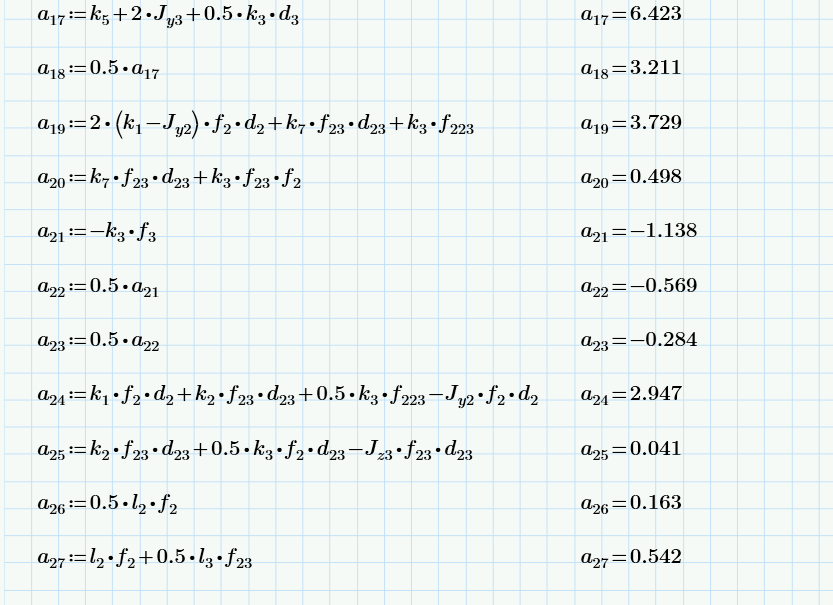
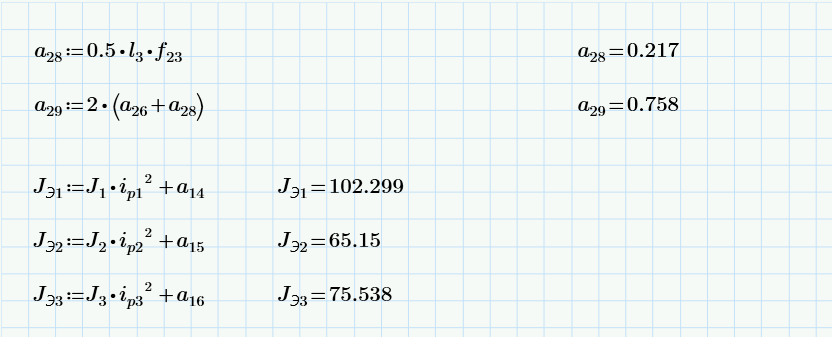
Рисунок 2 – Расчет параметров звеньев.
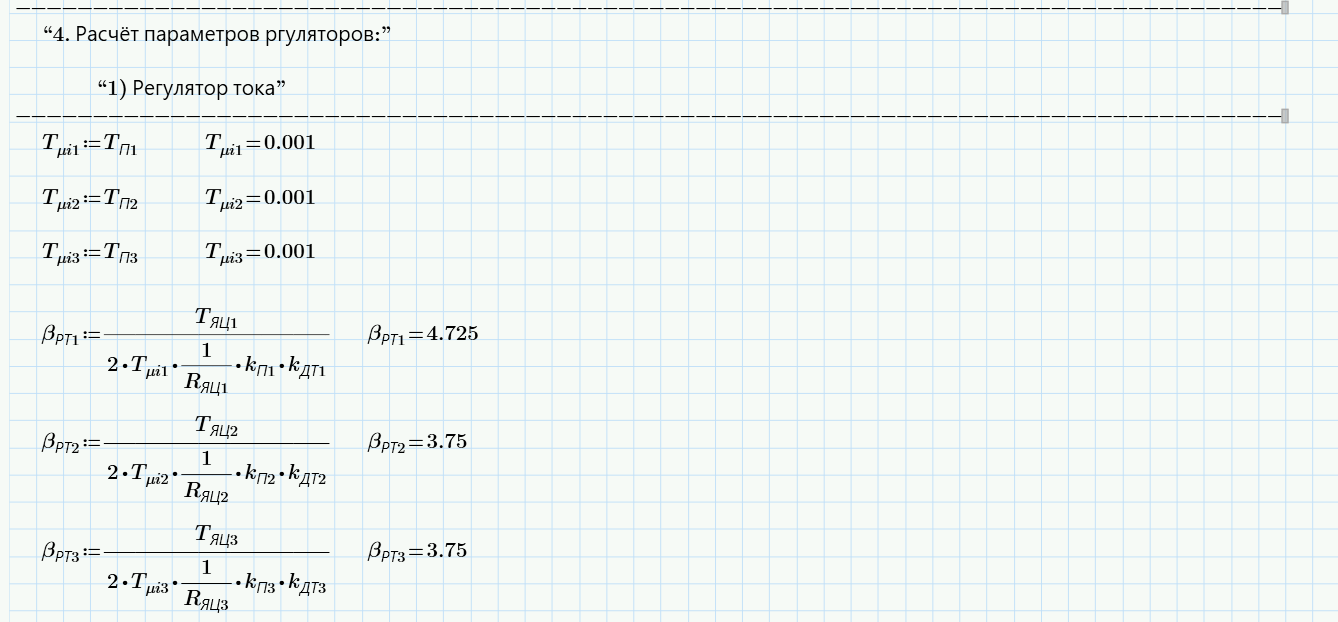
Рисунок 3 – расчет параметров регулятора тока.
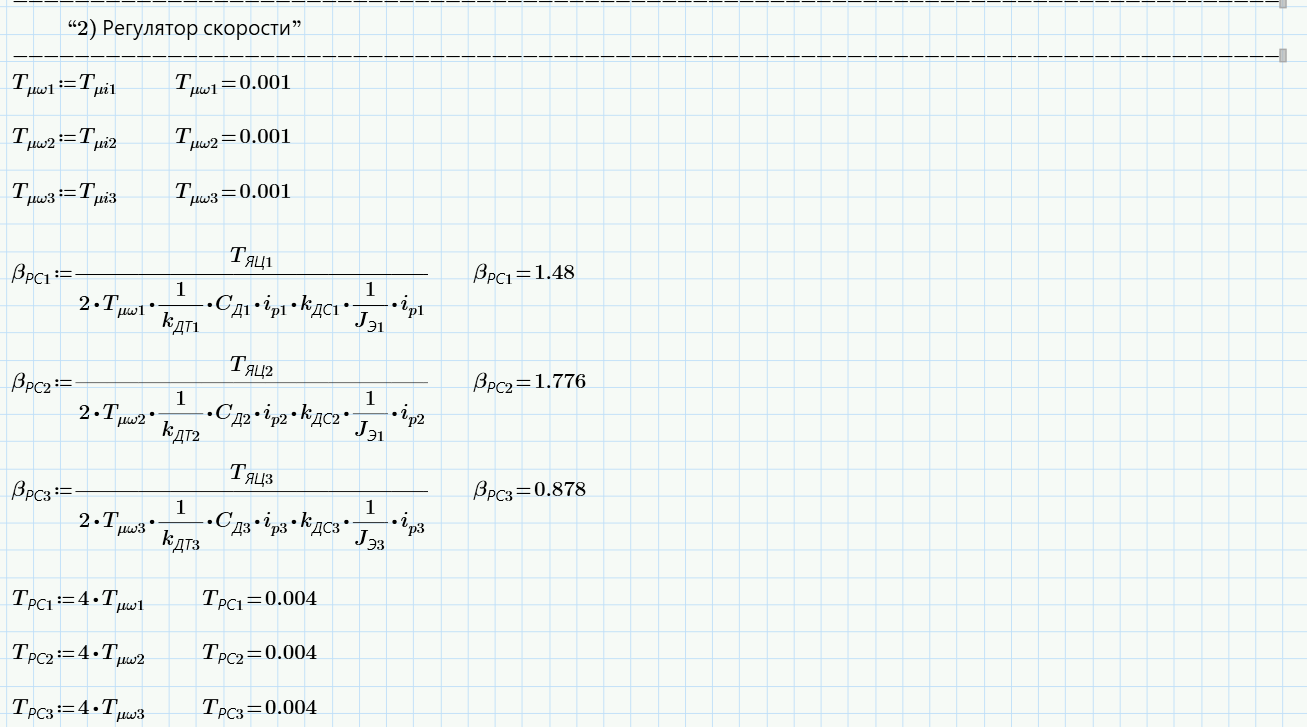
Рисунок 4 – расчет параметров регулятора скорости.
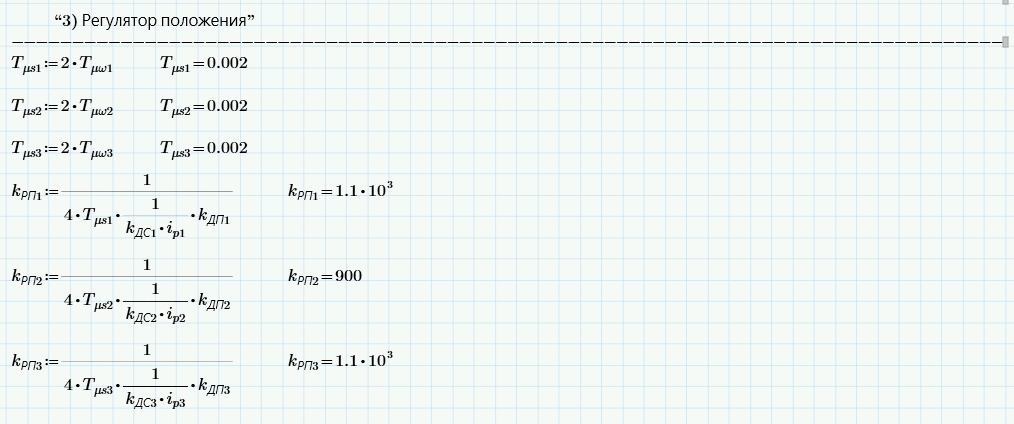
Рисунок 5 – расчет параметров регулятора положения.
Вывод:
На основании предоставленного задания можно сделать следующие выводы:
Техническое описание:
Математическая модель манипулятора учитывает различные аспекты, такие как кинематические связи, динамические взаимодействия инерционных, центробежных, кориолисовых и гравитационных моментов, а также внешние моменты исполнительных механизмов.
Используются двигатели постоянного и переменного тока.
Сделаны определенные допущения, такие как отсутствие люфтов между валами двигателей и звеньями манипулятора, отсутствие упругих деформаций в приводах, передаточных механизмах и звеньях, а также незначительность ошибок квантования в цифровых системах управления.
Общий вывод:
Работа направлена на расчет параметров и моделирование интеллектуальной системы манипулятора, что представляет собой важный этап в области робототехники.