

Лабораторная работа 4
Синтез кривошипно-ползунного, прямолинейно-направляющего механизма методом оптимизации
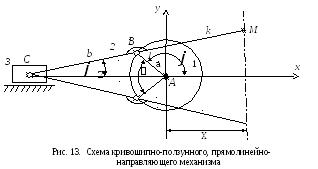
При синтезе кривошипно-ползунного направляющего механизма (рис.13) оптимизационными методами исходными данными для расчета являются:
![]() координата
заданной прямой линии,
координата
заданной прямой линии,
![]() угол поворота
кривошипа 1,
определяющий продолжительность
перемещения точки
угол поворота
кривошипа 1,
определяющий продолжительность
перемещения точки
![]() ,
расположенной на шатуне 2,
по прямой линии. В результате синтеза
необходимо определить параметры
,
расположенной на шатуне 2,
по прямой линии. В результате синтеза
необходимо определить параметры
![]() механизма, при которых траектория точки
механизма, при которых траектория точки![]() ,
на угле поворота
,
на угле поворота![]() кривошипа
незначительно отличается от заданной
траектории (прямой линии).
Целевая функция имеет вид
кривошипа
незначительно отличается от заданной
траектории (прямой линии).
Целевая функция имеет вид
![]() (24)
(24)
где
![]() координата точки
координата точки![]() .
Координаты точки
.
Координаты точки![]() вычисляются по формулам
вычисляются по формулам
где
угол
![]() определяется по формуле (11).
определяется по формуле (11).
На размеры звеньев накладываются ограничения:
- ограничения на максимальный и минимальный размеры звеньев
- условие существования кривошипа
 ;
;
- условие, обеспечивающее требуемые углы передачи
где
![]() допускаемый
угол передачи.
допускаемый
угол передачи.
Оптимизационный
синтез можно выполнить с помощью
универсальной, программной математической
системы Mathcad
Pro
[1], в которой для этих целей предусмотрена
функция Minimize
![]() ,
реализующая метод нелинейной оптимизации
Quasi-Newton.
Функция Minimize
,
реализующая метод нелинейной оптимизации
Quasi-Newton.
Функция Minimize
![]() используется
в составе блока решения, открываемого
директивой Given.
Внутри блока располагаются ограничения
в виде неравенств. Предварительно, до
директивы Given,
необходимо
задать начальное приближение варьируемых
параметров
используется
в составе блока решения, открываемого
директивой Given.
Внутри блока располагаются ограничения
в виде неравенств. Предварительно, до
директивы Given,
необходимо
задать начальное приближение варьируемых
параметров
![]() и расположить формулы, по которым
вычисляется целевая функция
и расположить формулы, по которым
вычисляется целевая функция![]() .
.
Порядок оформления программного блока:
значения начального приближения;
целевая функция;
ключевое слово Given;
ограничения;
функция Minimize().
Ограничения вводятся с помощью булевых операторов.
На рис. 14 показан фрагмент программы, реализующий оптимизационный алгоритм определения размеров кривошипно-ползунного механизма. В этой программе
![]() имя целевой функции,
которая рассчитывается ранее.
имя целевой функции,
которая рассчитывается ранее.
Рис.14. Использование
функции Minimizeпри
синтезе кривошипно-ползунного, прямолинейно-направляющего
механизма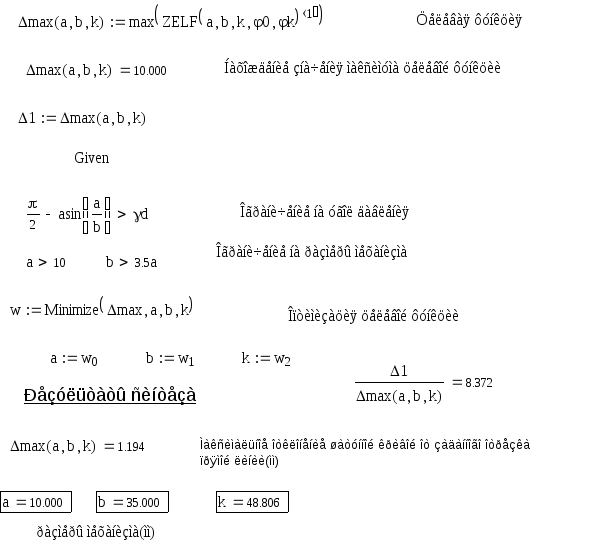
На
рис.15 показан фрагмент программы,
предназначенный для расчета схемы
механизма и траектории точки
![]() в
прямоугольной системе координат. Эта
схема используется для разработки
анимации ( или “оживления”). В системеMathcad
для анимации используется стандартная
технология создания анимационных файлов
с расширением .avi
и их воспроизведение с помощью программы
Microsoft
Video
1.1. В системе имеется встроенная
переменная FRAME,
принимающая целочисленные значения и
идентифицирующая номер текущего кадра.
в
прямоугольной системе координат. Эта
схема используется для разработки
анимации ( или “оживления”). В системеMathcad
для анимации используется стандартная
технология создания анимационных файлов
с расширением .avi
и их воспроизведение с помощью программы
Microsoft
Video
1.1. В системе имеется встроенная
переменная FRAME,
принимающая целочисленные значения и
идентифицирующая номер текущего кадра.
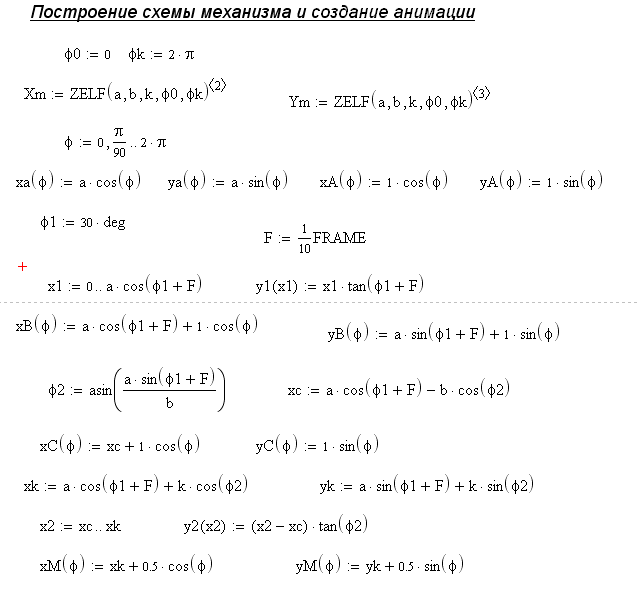
Рис.15.
Использование переменной FRAMEдля создания анимации кривошипно-ползунного
прямолинейно-направляющего механизма
Любая функция, график которой планируется наблюдать в развитии, должна быть функцией этой переменной. Диапазон изменения переменной FRAME задается в диалоговом окне команды Animate (анимация) меню View(вид). Анимация осуществляется путем просмотра созданной последовательности кадров с помощью проигрывателя.
Для создания анимации (рис.16) необходимо выполнить следующие действия:
Войти в процедуру форматирования графика, отключить автоматический выбор масштаба графика (Autoscale) и установить предельные значения на осях графика вручную.
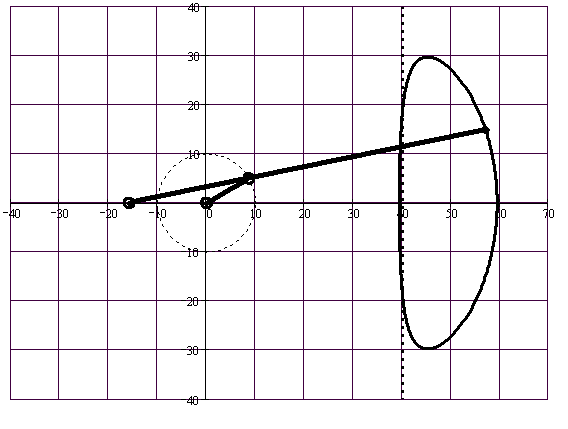
Рис.16. Схема кривошипно-ползунного, прямолинейно-направляющего механизма созданная системой Mathcad
Активизировать опцию Animate из пункта меню View. В открывшемся диалоговом окне (Animate) задается диапазон значений переменной FRAME и скорость следования кадров.Не закрывая диалогового окна Animate, вернуться к документу и протяжкой мыши выделить график пунктирным контуром, тем самым указав системе объект анимации.
Вернуться в диалоговое окно Animate и нажать кнопку "Animate" для создания видеофайла. После создания видеофайла появится окно (Playback) видеопроигрывателя, на котором, после нажатия кнопки "Пуск ", можно наблюдать анимацию механизма. Готовую анимацию можно сохранить в формате .avi , нажав кнопку "Save as" в диалоговом окне Animate.
Просмотр файлов формата .avi осуществлять путем вызова видеопроигрывателя, для чего необходимо активизировать опцию Playback позиции View главного меню. Затем открыть файл и запустить анимацию.