

Лабораторная работа 3
Синтез кривошипно-ползунного механизма методами интерполирования и квадратического приближения
При синтезе
кривошипно-ползунного механизма (рис.9)
по заданному закону движения
![]() ползуна3
в общем случае число неизвестных
параметров механизма равно пяти [2].
ползуна3
в общем случае число неизвестных
параметров механизма равно пяти [2].
Функция перемещения ползуна имеет вид
![]() ,
(14)
,
(14)
где
![]() угол,
определяющий положение входного звена
1;
угол,
определяющий положение входного звена
1;
![]() угол, определяющий начальное положение
входного звена;
угол, определяющий начальное положение
входного звена;
![]() начальное
положение ползуна3;
начальное
положение ползуна3;
![]() длина звена 1;
длина звена 1;
![]() длина
шатуна2;
длина
шатуна2;
![]() эксцентриситет.
эксцентриситет.
Необходимо
спроектировать механизм, у которого
отклонение
![]() заданного закона движения ползуна
заданного закона движения ползуна![]() от закона, реализуемого механизмом
от закона, реализуемого механизмом![]() ,
было бы минимальным на всем интервале
движения.
,
было бы минимальным на всем интервале
движения.
![]() (15)
(15)


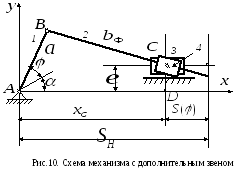
Для вывода
уравнений, связывающих отклонение
![]() от
заданного закона движения с размерами
механизма, вводим в состав механизма
дополнительное звено - кулисный камень4
(рис.10) и получаем механизм с двумя
степенями свободы. У этого механизма
звенья 1
и 3
имеют возможность перемещаться по
заданному закону движения, однако при
этом длина
от
заданного закона движения с размерами
механизма, вводим в состав механизма
дополнительное звено - кулисный камень4
(рис.10) и получаем механизм с двумя
степенями свободы. У этого механизма
звенья 1
и 3
имеют возможность перемещаться по
заданному закону движения, однако при
этом длина
![]() будет являться величиной переменной.
Выражение (15) можно заменить разностью
будет являться величиной переменной.
Выражение (15) можно заменить разностью
![]() (16)
(16)
Для упрощения аналитического выражения, используемого при синтезе механизма, перейдем к взвешенной разности
![]() (17)
(17)
Получаем
аналитическое выражение взвешенной
разности. Для этого проектируем замкнутый
контур
![]() ,образованный
звеньями механизма (рис.10), на координатные
оси
,образованный
звеньями механизма (рис.10), на координатные
оси
![]()
 (18)
(18)
где
![]() заданный
закон движения ползуна 3.
заданный
закон движения ползуна 3.
После преобразований уравнений (18) получаем выражение взвешенной разности
![]() (19)
(19)
Далее
считаем, что
![]() являются исходными,a
являются исходными,a
![]() искомыми параметрами. В этом случае
выражение взвешенной разности (19)
приводится к обобщенному полиному вида
искомыми параметрами. В этом случае
выражение взвешенной разности (19)
приводится к обобщенному полиному вида
![]()
где
![]()
![]()


При синтезе
методом интерполирования коэффициенты
![]() вычисляются из системы трех линейных
уравнений (20), где каждое уравнение
составлено для соответствующего узла
интерполирования, а
вычисляются из системы трех линейных
уравнений (20), где каждое уравнение
составлено для соответствующего узла
интерполирования, а![]() значения
входной и выходной функций в узлах
интерполирования
значения
входной и выходной функций в узлах
интерполирования
 (20)
(20)
Затем определяем параметры


![]()
Недостаток метода интерполирования заключается в том, что между узлами интерполирования отклонение от заданной функции может быть большим, так как система уравнений (20) не накладывает никаких условий на отклонение от заданной функции между узлами интерполирования. Этот недостаток может быть устранен при квадратическом приближении функций, которое основано на обращении в минимум среднего квадратического отклонения от заданной функции
 ,
,
где
![]() значения
аргумента в начале и в конце отрезка
приближения.
значения
аргумента в начале и в конце отрезка
приближения.
Среднее квадратическое отклонение становится минимальным, если обращается в минимум интеграл
 (21)
(21)
После преобразования выражения (21) получаем систему линейных уравнений
 (22)
(22)
где коэффициенты системы линейных уравнений определяются по формулам








В качестве примера
выполнен синтез кривошипноползунного
механизма по заданному закону движения
методом интерполирования при следующих
исходных данных:
![]() град.,
град.,![]() град.,
град.,
![]() мм,
мм,
![]() мм,
закон движения линейный
мм,
закон движения линейный
 (23)
Результаты расчета:
(23)
Результаты расчета:
![]() График отклонения от заданного закона
движения
График отклонения от заданного закона
движения![]() показан на рис.11 (кривая1).
Максимальное отклонение
показан на рис.11 (кривая1).
Максимальное отклонение
![]() мм. Максимальный угол давления
мм. Максимальный угол давления![]() град.
град.
При тех же исходных
данных выполнен синтез кривошипно-ползунного
механизма методом квадратического
приближения. Результаты расчета:
![]()
График
отклонения
![]() показан
на рис.11 (кривая2).
Максимальное отклонение от заданного
закона движения
показан
на рис.11 (кривая2).
Максимальное отклонение от заданного
закона движения
![]() мм.
мм.



Как
показали результаты расчета, максимальное
отклонение
![]() функции перемещения ползуна
функции перемещения ползуна![]() от
заданной функции
от
заданной функции
![]() у
механизма, полученного методом
квадратического приближения, больше
чем у механизма, рассчитанного по методу
интерполирования. Однако следует иметь
в виду, что участки с большим отклонением
расположены на границах расчетного
интервала. На
рис.12 показан фрагмент программы синтеза
кривошипно-ползунного механизма по
заданному закону движения ползуна
методом квадратического приближения.
Показан цикл по углу
у
механизма, полученного методом
квадратического приближения, больше
чем у механизма, рассчитанного по методу
интерполирования. Однако следует иметь
в виду, что участки с большим отклонением
расположены на границах расчетного
интервала. На
рис.12 показан фрагмент программы синтеза
кривошипно-ползунного механизма по
заданному закону движения ползуна
методом квадратического приближения.
Показан цикл по углу
![]() поворота входного звена, формула для
расчета закона движения выходного звена
и вычисление коэффициентов системы
линейных уравнений с помощью оператора
интегрирования. Оператор интегрирования
используется для вычисления определенного
интеграла функции по некоторому
интервалу. СистемаMathcad
[1] численно оценивает определенные
интегралы с помощью алгоритма Ромберга.
Метод Ромберга ускоряет сходимость к
интегралу метода трапеций или метода
прямоугольников, экстраполируя
последовательность оценок величины
интеграла и ширины шага интегрирования.
Для решения системы линейных уравнений
используется функция
поворота входного звена, формула для
расчета закона движения выходного звена
и вычисление коэффициентов системы
линейных уравнений с помощью оператора
интегрирования. Оператор интегрирования
используется для вычисления определенного
интеграла функции по некоторому
интервалу. СистемаMathcad
[1] численно оценивает определенные
интегралы с помощью алгоритма Ромберга.
Метод Ромберга ускоряет сходимость к
интегралу метода трапеций или метода
прямоугольников, экстраполируя
последовательность оценок величины
интеграла и ширины шага интегрирования.
Для решения системы линейных уравнений
используется функция
![]()