

MSU_Lektsii_Eliseev
.pdfМоделирование систем управления |
|
|
|
|
|
|
© 2016, В.Л. Елисеев |
||||||||||||||
|
d n |
|
|
d n 1 |
|
|
|
|
|
d n |
|
|
d n 1 |
|
|
|
|||||
|
|
|
a |
n 1 |
|
|
a |
|
y b |
|
|
|
|
b |
n 1 |
|
|
b |
|
u |
|
|
|
|
n 1 |
|
|
|
|
|
|
n 1 |
|
||||||||||
|
dt |
n |
|
dt |
|
0 |
|
|
n |
dt |
n |
|
dt |
|
0 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Представим данное дифференциальное уравнение в виде следующей аналоговой схемы:
u
n |
|
n-1 |
|
0 |
|
|
|
|
|
y
…
Будем искать значения коэффициентов i и i .
y x 1 0 u
x k |
x k 1 k u , |
|
|
|
k 1, n 1 |
||||
|
n |
n u |
|
|
x n i 1 x i |
|
|
||
|
|
|
|
|
i 1
Запишем значения всех n производных y:
y x 1 0 u x 2 1 u 0 u
y x 2 1 u |
0 u x 3 2 u |
1 u |
0 u |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
k |
|
|
|
|
|
|
|
|
|
y |
( k ) |
x k |
k i u |
( i ) |
x k 1 |
|
k i u |
( i ) |
, |
k |
1, n 1 |
|||||
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
i 1 |
|
|
|
i 0 |
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
( n ) |
x n |
n i u |
( i ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Подставляем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
n |
|
|
n |
|
|
|
|
n |
|
|
|
n |
|
y ( n ) i 1 x i |
n u n i u ( i ) i 1 x i |
n i u ( i ) |
||||||||||||||
|
|
|
i 1 |
|
|
i 1 |
|
|
|
i 1 |
|
|
|
i 0 |
||
21
Моделирование систем управления |
|
|
|
|
© 2016, В.Л. Елисеев |
|||||||
Сравниваем с исходным дифференциальным уравнением: |
|
|||||||||||
|
|
n 1 |
|
n |
|
n 1 |
|
k |
|
( i ) |
n |
|
|
( n ) |
a k y |
( k ) |
bi u |
( i ) |
a k |
|
k i u |
bi u |
( i ) |
||
y |
|
|
|
x k 1 |
|
|
||||||
|
|
k 0 |
|
i 0 |
|
k 0 |
|
i 0 |
|
|
i 0 |
|
|
|
n |
|
n 1 |
k |
|
n |
|
|
|
|
|
y ( n ) a k 1 x k |
a k k i u ( i ) bi u ( i ) |
|
|
|
|
|||||||
|
|
k 1 |
|
k 0 |
i 0 |
|
i 0 |
|
|
|
|
|
Видим, что i a i , а i получаются в результате решения некоторой СЛУ:
Возьмем для простоты случай n=2:
|
|
|
|
n |
|
|
Из дифференциального уравнения следует: |
n i u ( i ) |
2 u 1 u |
||||
|
|
|
|
i 0 |
|
|
|
|
|
n |
|
n 1 |
k |
Из полученного выражения y ( n ) |
имеем: bi u ( i ) |
a k k i u ( i ) |
||||
|
|
|
i 0 |
|
k 0 |
i 0 |
|
|
1 u |
|
|
|
|
или b 0 u b1 u |
b 2 u a 0 ( 0 u ) a 1 ( |
0 u ) |
|
|
|
|
При соответствующих производных u имеем:
0 u |
|
|
|
|
|
|
|
2 |
1 |
k |
|
bi u ( i ) |
a k k i u ( i ) |
||
i 0 |
k 0 |
i |
0 |
u : |
0 |
b 2 |
|
|
|
u : |
1 |
b1 a 1 0 |
|
|
|
u : |
2 |
b 0 a 0 0 a 1 1 |
Или в матричной форме:
b 2 |
|
|
1 |
0 |
0 0 |
|
||
|
|
|
|
|
|
|
|
|
b1 |
|
a 1 |
1 |
0 1 |
||||
|
|
|
|
a 1 |
|
|
2 |
|
b 0 |
|
|
a 0 |
1 |
|
|
||
В общем случае для вычисления i следует решить такую СЛУ:
|
b n |
|
|
b n 1 |
||
b |
n 2 |
|
|
|
|
|
|
|
|
|
|
|
b 0 |
|
|
||
|
|
|
|
1 |
|
0 |
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a n 1 |
|
1 |
0 |
|
1 |
|||||
|
|
a |
n 2 |
a |
n 1 |
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
a 0 |
a 1 |
a 2 |
|
|
|
|
|
||
|
|
|
1 |
|
n |
|||||||
Что нам дает аналоговая структурная модель? Возможность как аппаратной (электронной), так и программной реализации.
22
Моделирование систем управления |
© 2016, В.Л. Елисеев |
Лекция 5. Получение уравнений в пространстве состояний
Способы получения моделей описания систем в векторно-матричной форме и преобразования к пространству состояний. Стандартная форма описания на основе структурной модели. Получение модели описания нормальной форме на основе решения характеристического уравнения (случай простых и кратных корней).
1.Метод разложения на простые дроби (канонические формы).
Можем рассматривать обобщенное управляющее воздействие u1=M(p)u. Далее без потери общности можем говорить о системе G(p)=1/L(p). Полагая, что L(p) имеет простые нули,
n
можно записать: L ( p ) ( p i ) , где i – корни
i 1
1
Разлагая 1/L(p) на простые дроби, получим:
L ( p )
полинома L(p) и полюсы G(p).
n |
|
c i |
|
|
|
, где ci – вычеты. |
|||
p i |
||||
i |
1 |
|
||
|
n |
c |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
i |
|
y ( t ) |
|
|
|
|
|
|
|
|
|
|
||
Далее: |
|
u ( t ) |
|
|
|
|
|
|
|
|
|
|
||||
i 1 |
p i |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
1 |
|
|
|
|
n |
|
|
|
||
Вводим обозначения: x i |
( t ) |
u ( t ) , тогда y ( t ) |
c i x i |
( t ) . |
||||||||||||
|
||||||||||||||||
|
||||||||||||||||
|
|
|
|
|
|
p i |
|
|
i 1 |
|
|
|
||||
Согласно предыдущему уравнению x i i x i |
u ( t ) . Таким образом, матричное уравнение |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
системы в пространстве состояний имеет вид |
x |
Ax bu |
, где A - диагональная матрица с |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
корнями полинома L(p) на диагонали, а b=(1 1 1 … 1)T . |
|
|
|
|||||||||||||
Структурная схема: |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c1 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
u |
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
xn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cn |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Особенности канонической формы представления:
Матрица состояния диагональная с собственными числами на диагонали
Полюсы системы – собственные числа – фигурируют в явном виде
23

Моделирование систем управления |
© 2016, В.Л. Елисеев |
Если имеются комплексные корни, то они – комплексно-сопряженные. Применение данной формы представления неудобно, так как теряется возможность представлять состояние системы в n-мерном пространстве действительных чисел.
В |
общем случае для кратных корней L ( p ) ( p |
1 |
) k 1 ( p |
i |
) k i |
( p |
n |
) k r , где |
|
r |
|
|
|
|
|
|
|
n |
k i |
|
|
|
|
|
|
|
i 1
При этом матрица A приобретает нормальную жорданову форму:
|
J k |
1 |
( 1 ) |
|
|
0 |
|
|
|
|
i |
1 |
|
0 |
|
|
|
|
||
|
|
|
J k 2 ( 2 ) |
|
|
|
|
|
|
|
|
|
i |
|
|
|
1, |
j |
k i |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|||||||
A |
|
|
|
|
|
|
|
|
, |
J k i ( i ) |
|
|
|
|
|
, b j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
j k i |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
0 |
J k |
|
( k |
|
) |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
r |
r |
|
|
|
|
|
i |
|
|
|
i 1 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Уравнения состояния, матрица которых имеет нормальную жорданову форму, называются каноническими уравнениями состояния.
Если числитель M(p) передаточной функции имеет порядок меньший или равный порядку L(p), то система по-прежнему может быть описана теми же уравнениями. В случае равных порядков числителя и знаменателя в разложении появится постоянный член:
|
|
|
|
|
|
|
|
M ( p ) |
|
|
n |
|
c i |
|||
|
|
|
|
|
|
|
|
|
c 0 |
|
|
|||||
|
|
|
|
|
|
|
|
L ( p ) |
p |
i |
||||||
|
|
|
|
|
|
|
|
|
|
i 1 |
||||||
где c 0 |
|
M ( p ) |
, |
|
( p k |
|
M ( p ) |
|
|
|
, k |
|
|
|
||
|
|
|
|
|
|
|
|
|
||||||||
lim |
c k |
) |
|
|
|
1, n |
|
|||||||||
|
L ( p ) |
|
|
|||||||||||||
|
|
|
||||||||||||||
|
p 0 L ( p ) |
|
|
|
p k |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
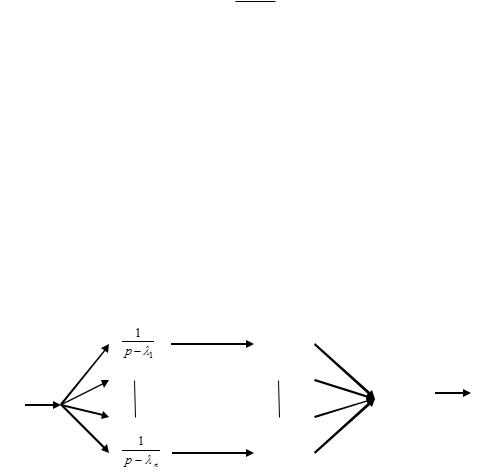
2. Метод простых множителей.
Если функция G(p) разложима на множители, то её можно представить в виде:
n |
|
1 |
|
G ( p ) |
|||
|
|||
( p i ) |
|||
i |
1 |
||
Соответствующая блок-схема:
u |
|
x1 |
|
x2 |
|
y=xn |
|
|
|
|
|
|
|
24
Моделирование систем управления |
|
|
|
© 2016, В.Л. Елисеев |
||||||||
1 |
|
0 |
|
|
|
|
|
|
0 |
|
||
|
|
|
|
|
1 |
|
|
|||||
|
1 2 |
|
|
|
|
|
|
|
|
|
|
|
A |
1 |
|
|
, b |
0 |
, |
c |
|
||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
0 |
1 |
n |
|
|
|
|
|
|
|
|
|
Этот метод представления не ограничен случаем простых корней.
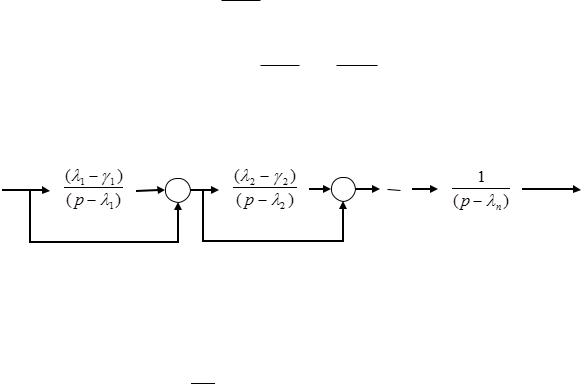
Если числитель M(p) передаточной функции имеет порядок меньший или равный порядку L(p), то система раскладывается на множители в соответствии с уравнением:
G ( p ) M ( p )
L ( p )
где i – корни полинома M(p). Так как
l
k
i1
p i
p i
( p i |
) |
n |
|
1 |
|
|
|||
( p i |
|
|
i ) |
|
) i l 1 |
( p |
|||
1 i i , то передаточную функцию
p i
можно реализовать следующей схемой:
u |
|
x1 |
|
x2 |
|
y=kxn |
||||||
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Уравнения, описывающие поведение системы принимают вид:
dx 2
dt
dx 1 |
|
|
x |
|
( |
|
|
|
) u |
|
1 |
1 |
1 |
1 |
|||||
dt |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||
2 x 2 ( 2 2 ) x1 ( 2 2 ) u
|
|
|
|
|
|
|
dx n |
|
|
x |
|
x |
|
|
n |
n |
n 1 |
|||
dt |
|
|
||||
|
|
|
|
|
||
y kx n
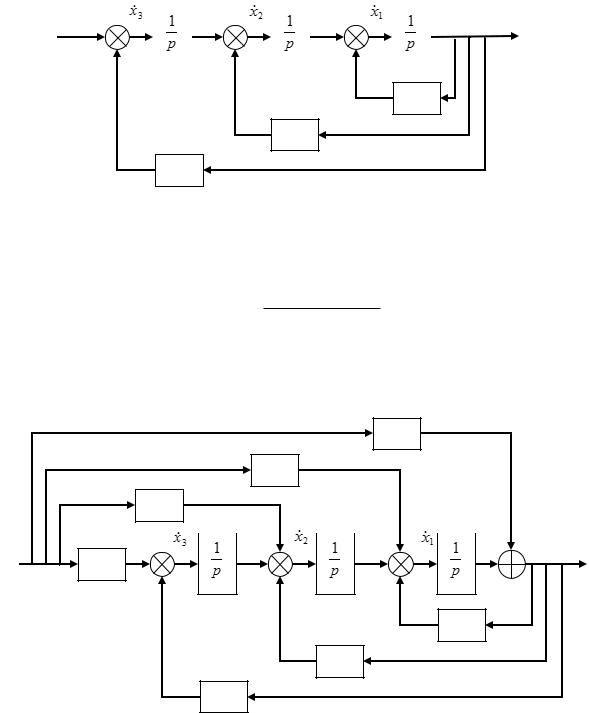
3. Метод, применяемый при аналоговом моделировании.
При аналоговом моделировании система G(p)=1/L(p) реализуется с помощью сумматоров, инверторов-усилителей и идеальных интегрирующих элементов.
Пример: |
G ( p ) |
1 |
|
|
|
|
|
|
|||
p 3 ap 2 |
bp |
c |
|||
|
|
Можно записать уравнения состояния следующего вида:
x 1 x 2 ax 1
25
Моделирование систем управления |
© 2016, В.Л. Елисеев |
x 2 x 3 bx 1 x 3 cx 1 u y x 1
Блок-схема аналогового моделирования данной системы:
u |
|
x3 |
|
x2 |
|
y=x1 |
|
|
|
||||
|
|
|
|
|
|
|
a
-b
-c
Пример реализации аналогового моделирования в случае если числитель M(p) передаточной функции имеет порядок меньший или равный порядку L(p):
G ( p )
dp 3 ep 2 fp g
p 3 ap 2 bp c
Можно увидеть, что влияние числителя обеспечивается соответствующими прямыми связями:
d
e
f
u |
|
x3 |
|
x2 |
|
x1 |
y |
|
|
|
g
-a
-b
-c
В матричной форме это выражается уравнениями:
26
Моделирование систем управления |
© 2016, В.Л. Елисеев |
|
x 1 |
|
|
|
x 2 |
|
|
|
|
||
|
|
|
|
|
x 3 |
|
|
|
|
|
a |
1 |
0 x 1 |
|
e ad |
|
||||
|
|
|
|
|
|
|
|
|
|
b |
0 |
1 x 2 |
f bd |
u |
|||||
|
c |
|
|
|
|
|
|
g cd |
|
|
0 |
0 |
|
x 3 |
|
|
|||
|
x 1 |
|
|
|
|
|
|
y 1 0 |
0 x 2 |
du |
|
|
|
x 3 |
|
|
|
|
|
На примере видно, что матрицы A и c не отличаются от случая G(p)=1/L(p).
Нормальная форма.
Классическим подходом при построении модели в пространстве состояний является использование в качестве переменных состояния выходного сигнала и его n-1 производных. Такая форма представления называется нормальной и отличается простотой, если собственные значения различны. Данную форму представления можно применять для нелинейных дифференциальных уравнений общего вида.
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выбирая |
для |
|
L ( p ) |
a n i |
p i |
в |
качестве переменных состояния x 1 y , |
x 2 |
x 1 ,…, |
||||||||||||||||
|
|
x n 1 , |
получим |
i 0 |
|
|
|
|
уравнения |
состояния следующие матрицы |
и |
вектора |
|||||||||||||
x n |
|
для |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
коэффициентов: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
0 |
|
|
1 |
|
|
|
0 |
|
|
|
|
0 |
|
|
1 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
0 |
|
|
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
A |
|
|
|
|
|
|
|
|
1 |
|
|
, |
b |
|
|
|
, c |
|
|
||||||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
a |
|
|
a |
|
|
|
|
a |
|
|
1 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
n |
|
|
n 1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
0 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
a 0 |
|
a 0 |
|
|
a 0 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
a 0 |
|
|
|
|
|
|
|||||||||
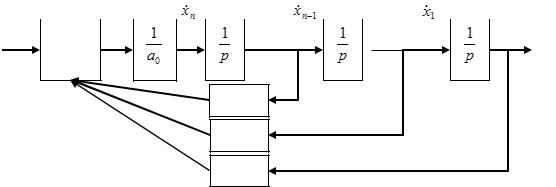
Аналоговая структурная схема:
u |
|
|
|
|
|
xn |
|
xn-1 |
|
y=x1 |
-a1
-an-1
-an
Нормальная форма разложения при прямолинейном подходе в случае G(p)=M(p)/L(p) приводит к появлению производных от возмущающего воздействия u(t). Однако
27
Моделирование систем управления |
© 2016, В.Л. Елисеев |
специальной подстановкой можно устранить необходимость во взятии производных от u(t), сохранив вид нормальной формы.
Например, для |
|
G ( p ) |
|
y |
|
|
p a |
|
дифференциальное уравнение |
имеет вид |
||
|
|
|
|
|
|
|||||||
|
|
|
|
|
u |
|
( p b )( p c ) |
|
|
|||
y ( b c ) y bcy |
u au |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Подстановка вида |
y x 1 |
k 0 u , |
x 1 x 2 |
k 1 u , |
x 2 bcx 1 ( b c ) x 2 k 2 u (*) |
позволяет |
||||||
выразить x1 и x2 через y и u:
x 1 y k 0 u , |
|
|
x |
1 |
y k |
0 u |
|
|||
|
|
|
|
|
|
|
|
|
|
|
x 2 |
x |
1 |
k 1 u y k |
0 u k |
1 u |
x |
2 |
y k |
0 u k |
1 u |
|
|
|
|
|
|
|
|
|
|
|
И, подставив выражения для x1 , x 2 , x1 , x 2 |
в (*), переписать дифференциальное уравнение |
||||||
следующим образом: |
|
|
|
|
|
|
|
|
y k |
0 u k 1 u bc ( y k 0 u ) ( b c ) y k |
0 u k 1 u k 2 u |
|
|||
|
|
|
|
|
|
|
|
|
y ( b c ) y |
bcy k 0 u k |
1 |
( b c ) k 0 u k 2 |
( b c ) k 1 bck |
0 u |
|
|
|
|
|
|
|
|
|
Отсюда: k 0 |
0 , k 1 1 , k 2 |
a ( b c ) |
|
|
|
|
|
Итоговое представление уравнений в пространстве состояний:
x 1 |
|
|
|
0 |
|
1 |
|
x 1 |
|
|
k |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
||
|
|
|
|
|
bc |
|
( b |
|
x 2 |
|
|
|
|
|
|
x 2 |
|
|
|
c ) |
|
|
k 2 |
|
|||||
|
|
|
|
|
|
y |
x1 |
|
|
|
|
|
|
|
Для общего случая G(p)=M(p)/L(p) имеем:
n |
|
n |
L ( p ) a n i p i |
, |
M ( p ) b n j p j |
i 0 |
|
j 0 |
Причем полином L(p) нормирован, т.е. a 0 |
1 |
|
Тогда можно показать, что в матричной форме уравнения состояния
x A bu
y c T x du
матриц A и вектора b, c имеют вид:
28
Моделирование систем управления |
|
|
|
|
|
|
|
|
|
|
|
|
|
© 2016, В.Л. Елисеев |
|||
|
|
0 |
1 |
|
0 |
|
|
k 1 |
|
|
|
1 |
|
|
|||
|
|
0 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
, b |
|
|
|
, c |
|
0 |
, d |
k |
|||||
|
|
|
|
1 |
|
k |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
0 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n 1 |
|
|
|
|
|
|
|
|
|
a n |
a n 1 |
|
a |
|
|
|
k n |
|
|
|
0 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||||
Выходной сигнал y |
x 1 k 0 u , а коэффициенты равны: |
|
|
|
|
|
i 1 |
|
|
|
k 0 b 0 , |
k i bi a i m k m |
, i 1, n |
|
m 0
29

Моделирование систем управления |
© 2016, В.Л. Елисеев |
Лекция 6. Матричная форма представления
Приведение нормальной формы описания динамической системы к канонической форме путём линейного преобразования на основе матрицы подобия. Пример канонизации уравнений состояния. Способ получения уравнений состояния на основе структурной блок-схемы многосвязной динамической системы.
Преобразование из нормальной формы представления системы в каноническую
Описание динамической системы в пространстве состояний:
x Ax Bu
y Cx Du
Внормальной форме элементами вектора состояния x являются выходной сигнал и его первые n-1 производных.
Вканонической форме координаты x представляют собой составляющие собственных колебаний.
Мы видели, что в нормальной форме описания односвязной динамической системы матрицы имеют вид:
|
|
0 |
1 |
0 |
|
|
0 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
||
|
|
0 |
0 |
1 |
|
|
0 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
||||
A |
|
|
|
|
|
|
|
|
B |
|
C |
D |
0 |
||||||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
0 |
0 |
0 |
|
|
1 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
0 |
|
|
|
||
|
|
a 0 |
a 1 |
a 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
a n 1 |
|
|
|
|
|
|
|
|
|
|
|
|||||
где значения
|
b n |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
b n 1 |
|
|
a n 1 |
||||
b |
n 2 |
|
|
a |
n 2 |
||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
b 0 |
|
|
|
a 0 |
||
|
|
|
|
||||
k , k |
0 , n |
0 |
|
1 |
0 |
a n 1 |
1 |
a 1 |
a 2 |
получаются в результате решения следующей СЛУ:
0 |
0 |
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
0 |
|
|
|
1 |
|
n |
|
|
|
||
Поскольку при преобразовании из нормальной формы в каноническую меняются переменные состояния x x * , обозначим этот переход линейным оператором – умножением на матрицу: x Vx *
Подставим:
V x * |
AVx |
* Bu |
x * |
V 1 AVx |
* V 1 Bu |
|
|
y |
CVx |
* Du |
|
y CVx |
* Du |
|
|
|||||
30