

Сверточные нейронные сети. Эффект границ. Шаг свертки.
Можно заметить, что выходные ширина и высота карт признаков могут отличаться от входных. На то есть две причины:
- эффекты границ, которые могут устраняться дополнением входной карты признаков;
- использование шага свертки.
Эффекты границ и дополнение
На слайде изображена карта признаков 5 × 5 (всего 25 клеток). Существует всего девять клеток, в которых может находиться центр окна 3 × 3, образующих сетку 3 × 3. Следовательно, карта выходных признаков будет иметь размер 3×3. Она получилась немного сжатой: ровно на две клетки вдоль каждого измерения.
При этом можно увидеть, как проявляется эффект границ на более раннем примере: изначально у нас имелось 28 × 28 входов, количество которых после первого сверточного слоя сократилось до 26 × 26.

Допустимые местоположения шаблонов 3 × 3 во входной карте признаков 5 × 5
Чтобы получить выходную карту признаков с теми же пространственными размерами, что и входная карта, можно использовать дополнение.
Дополнение заключается в добавлении соответствующего количества строк и столбцов с каждой стороны входной карты признаков, чтобы можно было поместить центр окна свертки в каждую входную клетку. Для окна 3 × 3 нужно добавить один столбец справа, один столбец слева, одну строку сверху и одну строку снизу. Для окна 5 × 5 нужно добавить две строки.

Дополнение входной карты признаков 5 × 5, чтобы получить 25 шаблонов 3 × 3
Шаг свертки
Другой фактор, который может влиять на размер выходной карты признаков, — шаг свертки.
В общем случае расстояние между двумя соседними окнами является настраиваемым параметром, который называется шагом свертки и по умолчанию равен 1.
На слайде представлено, как извлекаются шаблоны 3 × 3 сверткой с шагом 2 из входной карты 5 × 5.
Использование шага 2 означает уменьшение ширины и высоты карты признаков за счет уменьшения разрешения в два раза.

Шаблоны 3 × 3 свертки с шагом 2 × 2
Основные задачи в сфере компьютерного зрения.
Классификация изображений
Цель — присвоить изображению одну или несколько меток. Это может быть однозначная классификация (изображение можно отнести только к одной категории) или многозначная (изображению можно присвоить несколько меток, в зависимости от наличия на нем объектов из разных категорий.
Сегментация изображений
Цель — сегментировать, или разбить, изображение на непересекающиеся области, каждая из которых представляет некоторую категорию.
Обнаружение объектов
Цель — нарисовать прямоугольники (которые называют ограничивающими рамками) вокруг интересующих объектов на изображении и связать каждый прямоугольник с некоторым классом. Автопилот автомобиля, например, может использовать модель обнаружения объектов для наблюдения за автомобилями, пешеходами и знаками, попадающими в поле зрения своих камер
Сверточные нейронные сети. Модульность, иерархия, многократное использование
Есть универсальный рецепт, помогающий упростить сложную систему: нужно лишь структурировать всю аморфную мешанину в модули, организовать модули в иерархию и многократно использовать одни и те же модули в разных местах по мере необходимости («многократное использование» — еще один термин для обозначения абстракции в этом контексте).
Формула «модульность — иерархия — многократное использование» лежит в основе системной архитектуры практически во всех областях, где в принципе используется термин «архитектура». На ней базируется любая сложная система, будь то собор, ваше собственное тело, завод по производству автомобилей или нейронная сеть.
Точно так же архитектура модели глубокого обучения в первую очередь связана с разумным применением принципов модульности, иерархии и повторного использования. Все популярные сверточные архитектуры не только структурированы по слоям — их слои также организованы в повторяющиеся группы, называемые блоками или модулями.
Кроме того, большинство сверточных сетей имеют пирамидальную структуру (иерархию признаков). Число фильтров растет с глубиной слоя, а размер карт признаков, соответственно, уменьшается.
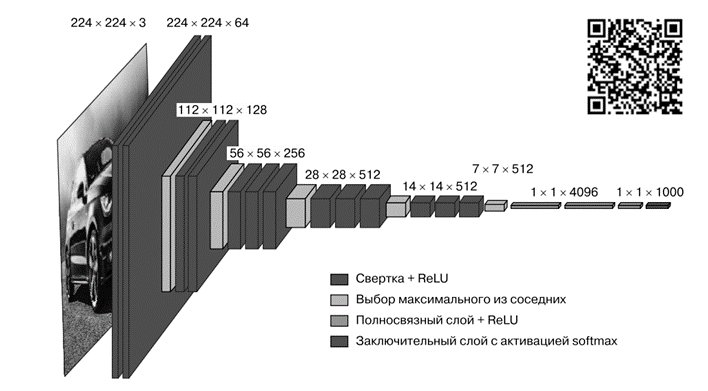
Архитектура VGG16: обратите внимание на повторяющиеся блоки слоев и пирамидальную структуру карт признаков