

LR4_DIN / Novikov_CM9-71_otchet_Lr4
.docx
|
Министерство науки и высшего образования Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования «Московский государственный технический университет имени Н.Э. Баумана (национальный исследовательский университет)» (МГТУ им. Н.Э. Баумана) |

Кафедра СМ9 «Многоцелевые гусеничные машины и мобильные роботы»
Отчёт по лабораторной работе №4
по курсу «Динамика транспортных средств»
по теме: «Тормозной режим качения колеса»
Студент (ФИО, группа) |
___________________________ (Подпись, дата) |
Новиков А.Д. СМ9-71 |
Преподаватель |
___________________________ (Подпись, дата) |
Тихонов Е.А. |
Москва 2023 г.
Цель работы – создание математической модели колеса автомобиля при разгоне и торможении, и реализация этой модели в ПО Matlab Simulink.
1 Расчетная схема
При создании расчетной схемы руководствуемся следующими допущениями:
Движение колеса прямолинейное, по твердой ровной опорной поверхности;
Колеса жесткие, контакт колеса с опорной поверхностью – точечный.
Связь колеса и опорной поверхности является удерживающей (колесо не отрывается от поверхности);
Положение оси колеса относительно нормали к опорной поверхности не изменяется;
Н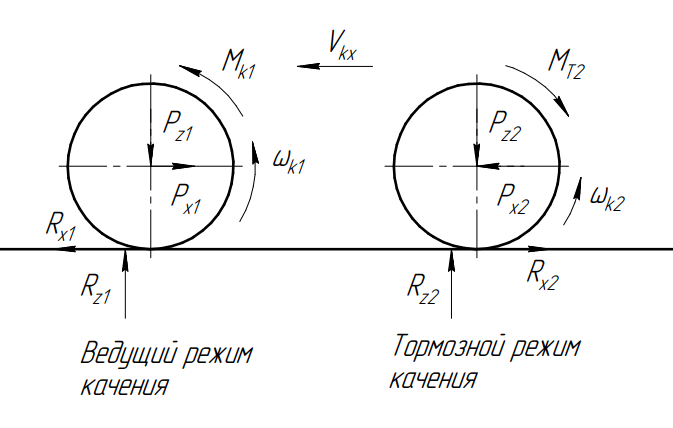 а
рисунке 1 изображена расчетная схема,
рассматриваемая в данной лабораторной
работе.
а
рисунке 1 изображена расчетная схема,
рассматриваемая в данной лабораторной
работе.
Рисунок 1 – Расчетная схема для колеса в различных режимах качения
 – текущая
горизонтальная скорость движения
колеса,
– текущая
горизонтальная скорость движения
колеса,
 ;
;
 – угловые
скорости вращения колес,
– угловые
скорости вращения колес, ;
;
 – крутящий
момент,
– крутящий
момент,
 ;
;
 – тормозной
момент,
;
– тормозной
момент,
;
 – внешняя
продольная сила,
– внешняя
продольная сила,
 ;
;
 – внешняя
вертикальная сила,
;
– внешняя
вертикальная сила,
;
Запишем уравнение движения для колеса:
(1)

где
 – ускорение центра масс колеса,
– ускорение центра масс колеса,
 ;
;
 – масса
четверти автомобиля, приходящаяся на
одно колесо, и колеса, кг.
– масса
четверти автомобиля, приходящаяся на
одно колесо, и колеса, кг.
 – продольная
реакция в пятне контакта колеса с опорной
поверхностью,
;
– продольная
реакция в пятне контакта колеса с опорной
поверхностью,
;
 – коэффициент
сцепления колеса с опорной поверхностью;
– коэффициент
сцепления колеса с опорной поверхностью;
 –
константы,
определяющие форму кривой коэффициента
сцепления;
–
константы,
определяющие форму кривой коэффициента
сцепления;
 – вертикальная
сила реакции со стороны опорной
поверхности,
;
– вертикальная
сила реакции со стороны опорной
поверхности,
;
 – момент
инерции колеса относительно оси его
вращения,
– момент
инерции колеса относительно оси его
вращения,
 ;
;
 − динамический
радиус колеса,
− динамический
радиус колеса,
 ;
;
 – угловая
скорость колеса,
;
– угловая
скорость колеса,
;
– крутящий
момент, подводимый к колесу от трансмиссии,
 ;
;
 – момент
сопротивления качению,
;
– момент
сопротивления качению,
;
 – коэффициент
сопротивления качению;
– коэффициент
сопротивления качению;
 − радиус
чистого качения, м;
− радиус
чистого качения, м;
 − ускорение
свободного падения,
.
− ускорение
свободного падения,
.
Будем считать зависимость крутящего момента на колесе от угловой скорости линейной, как указано на рисунке 2.
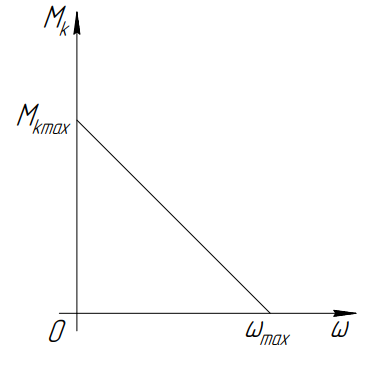
Рисунок
2 – Зависимость
от

(2) меняет свой знак в зависимости от режима
качения колеса:
меняет свой знак в зависимости от режима
качения колеса:
 − соответствует тяговому режиму,
− соответствует тяговому режиму,
 – тормозному, поэтому используем
обобщенную формулу для различных
режимов, тогда коэффициент скольжения
определяется формулой (2).
– тормозному, поэтому используем
обобщенную формулу для различных
режимов, тогда коэффициент скольжения
определяется формулой (2).

Д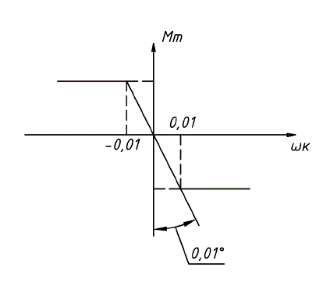 ля
получения тормозного момента построим
график зависимости
от угловой скорости колеса
.
Для учета возможности возникновения
нежелательных рывков модели добавим
небольшой наклон графика в области нуля
угловой скорости. Описанный график
показан на рисунке 3.
ля
получения тормозного момента построим
график зависимости
от угловой скорости колеса
.
Для учета возможности возникновения
нежелательных рывков модели добавим
небольшой наклон графика в области нуля
угловой скорости. Описанный график
показан на рисунке 3.
Рисунок 3 – Зависимость тормозного момента от угловой скорости колеса
Примем, что максимальный тормозной момент численно равняется максимальному крутящему моменту колеса .
При
расчете в среде Matlab
Simulink возникает ошибка в случае полной
остановки колеса, когда
 и
и
 ,
и тогда при расчете коэффициента
скольжения
получается ситуация неопределенного
деления на ноль. Для устранения описанной
проблемы необходимо задать условие,
которое останавливает моделирование
с помощью блока Stop, когда линейная
скорость
,
и тогда при расчете коэффициента
скольжения
получается ситуация неопределенного
деления на ноль. Для устранения описанной
проблемы необходимо задать условие,
которое останавливает моделирование
с помощью блока Stop, когда линейная
скорость
 .
Реализация данного условия в Simulink
показана на рисунке 4.
.
Реализация данного условия в Simulink
показана на рисунке 4.

Рисунок 4 – Условие остановки расчета в Matlab Simulink
2 Исходные данные
Исходные данные для расчета в ПО Matlab представлены на рисунке 3.

Рисунок 5 – Исходные данные для расчета в Matlab
3 Тормозной режим качения колеса
В
первой части лабораторной работы
моделируется тормозной режим качения
колеса, следовательно,
 .
.
На рисунке 6 показана математическая модель, построенная в Matlab Simulink.
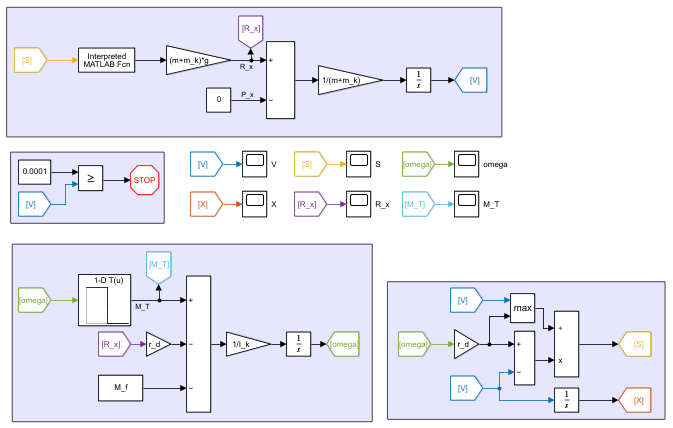
Рисунок 6 – Графическая модель для решения дифференциальных уравнений тормозного режима качения колеса
Н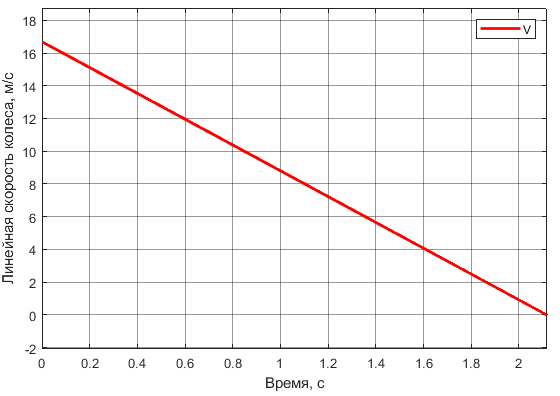 а
рисунках 7-10 показаны зависимости
а
рисунках 7-10 показаны зависимости
 ,
соответственно.
,
соответственно.
Рисунок
7 – График изменения скорости


Рисунок
8 – График изменения продольных реакций

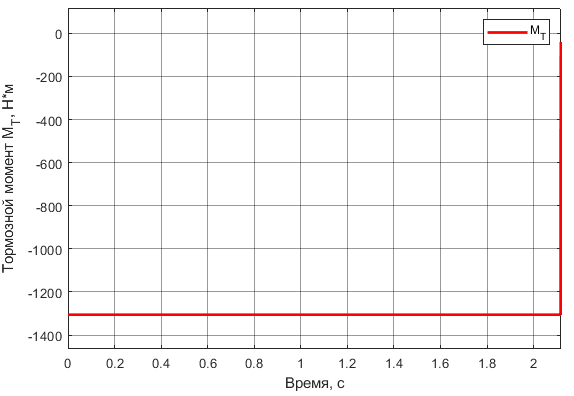
Рисунок
9 – График изменения тормозного момента

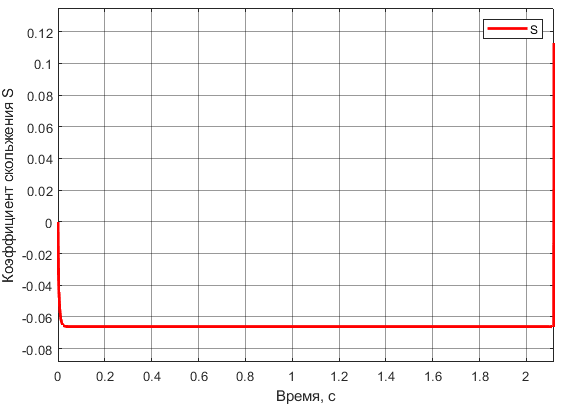
Рисунок
10 – График изменения коэффициента
скольжения

4 Разгон и торможение колеса
Для переключения режимов качения колеса с разгонного (ведущего) на тормозной используем блок Switch. Пусть торможение начинается через 20 секунд. Реализация этой модели представлена на рисунке 11.
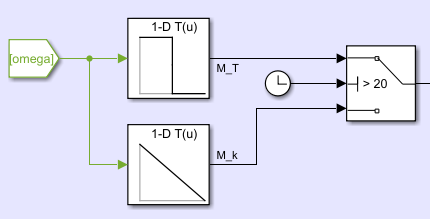
Рисунок 11 – Графическая модель переключения режимов качения колеса
На рисунке 12 показана математическая модель для решения дифференциальных уравнений, построенная в Matlab Simulink.

Рисунок 12 – Графическая модель для решения дифференциальных уравнений разгонного и тормозного режимов качения колеса
На
рисунках 13-16 показаны зависимости
 для
ведущего и тормозного режимов качения
соответственно.
для
ведущего и тормозного режимов качения
соответственно.
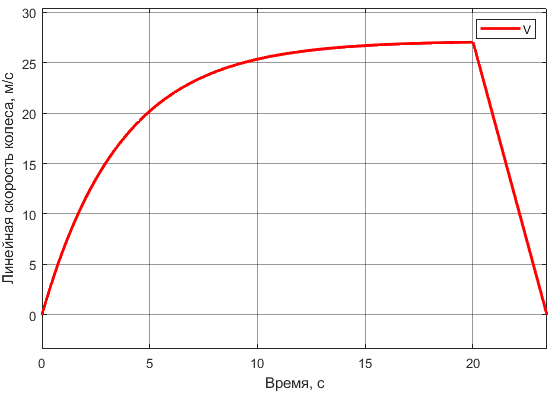
Рисунок 13 – График изменения скорости

Рисунок 14 – График изменения продольных реакций
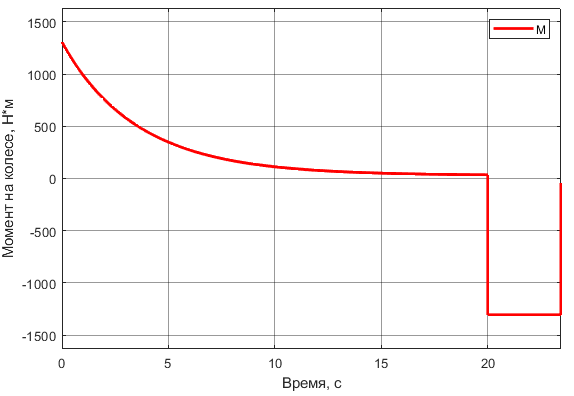
Рисунок
15 – График изменения момента на колесе

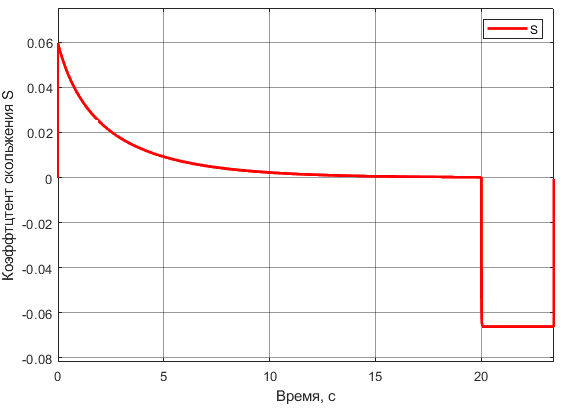
Рисунок 16 – График изменения коэффициента скольжения
5 Разгон и торможение колеса с учетом сцепления
(3)

где
 − момент инерции двигателя,
;
− момент инерции двигателя,
;
 – частота
вращения коленчатого вала,
;
– частота
вращения коленчатого вала,
;
 – момент
на коленчатом валу двигателя,
;
– момент
на коленчатом валу двигателя,
;
 – момент
на фрикционе,
.
– момент
на фрикционе,
.
Будем считать зависимость момента на фрикционе от степени нажатия на педаль линейной, как указано на рисунке 17.

Рисунок
17 – График зависимости момента на
фрикционе
от степени нажатия на педаль сцепления

На рисунке 18 показана математическая модель для решения дифференциальных уравнений, построенная в Matlab Simulink.
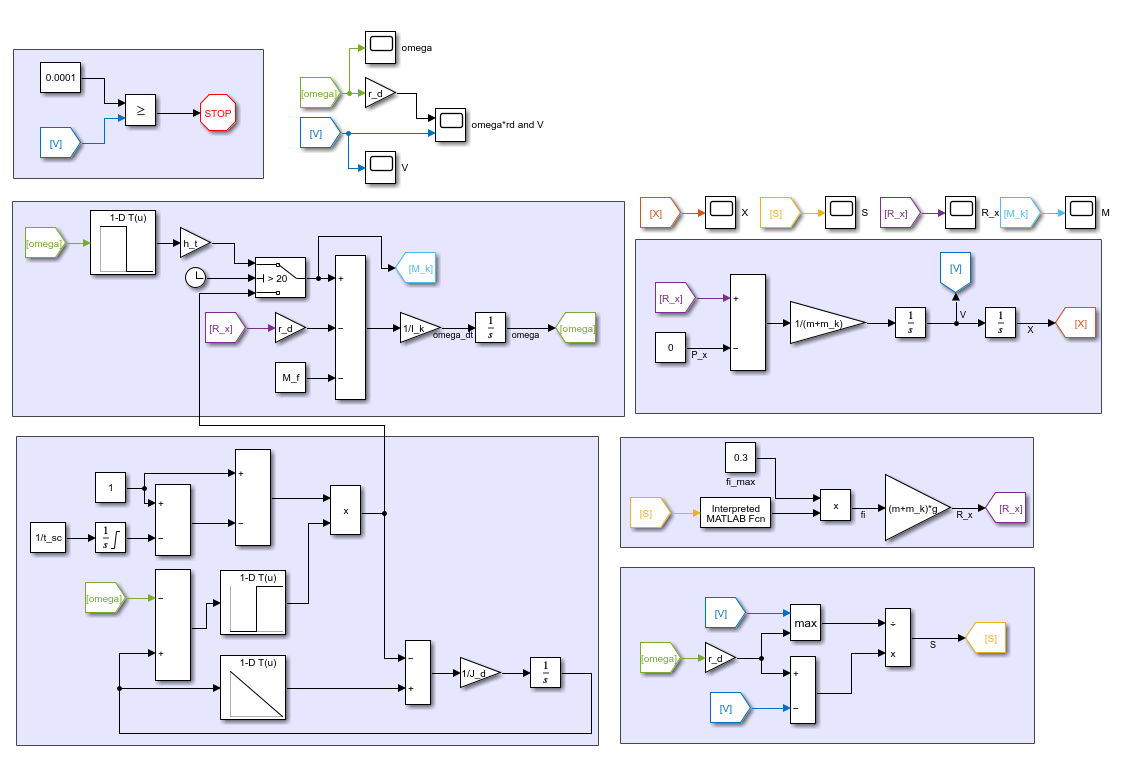
Рисунок 18 – Графическая модель разгона и торможения колеса с учетом сцепления
На
рисунках 19-22 показаны зависимости
 соответственно.
соответственно.

Рисунок
19 – График изменения скоростей


Рисунок 20 – График изменения продольных реакций

Рисунок 21 – График изменения момента на колесе

Рисунок 22 – График изменения коэффициента скольжения
6 Разгон и торможение колеса с учетом сцепления и АБС
Для
моделирования антиблокировочной системы
с помощью блока Saturation зададим диапазон
значений [0..1], в пределах которого будет
изменяться дополнительный коэффициент,
при умножении которого на степень
нажатия педали тормоза
 будет получено новое скорректированное
значение
.
Если коэффициент скольжения превышает
критическое значение (происходит юз),
то воздействие на педаль тормоза
ослабляется для предотвращения блокировки
колес.
будет получено новое скорректированное
значение
.
Если коэффициент скольжения превышает
критическое значение (происходит юз),
то воздействие на педаль тормоза
ослабляется для предотвращения блокировки
колес.
На рисунке 23 показана математическая модель для решения дифференциальных уравнений, построенная в Matlab Simulink.
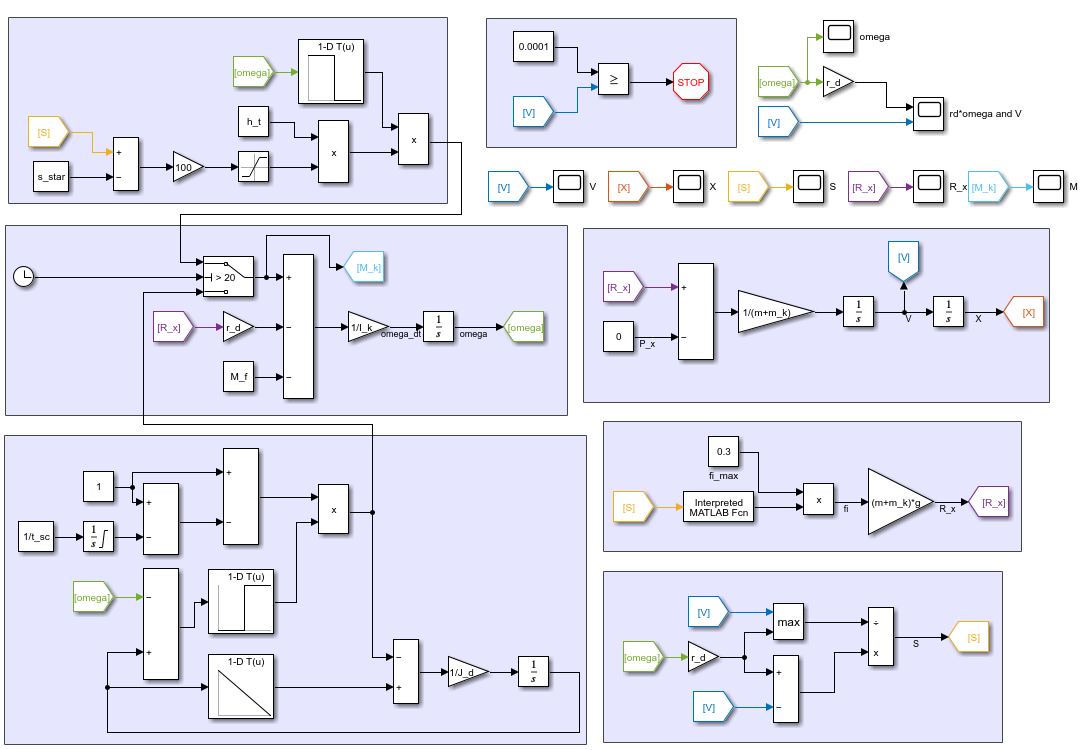
Рисунок 23 – Графическая модель разгона и торможения колеса с учетом сцепления и АБС системы
На
рисунках 24, 25 показаны зависимости
 соответственно.
соответственно.

Рисунок 24 – График изменения скоростей
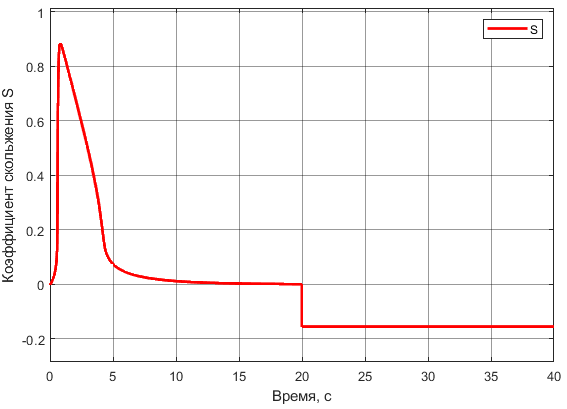
Рисунок 25 – График изменения коэффициента скольжения
7 Вывод
По результатам данной лабораторной работы была построена математическая модель тормозного и ведущего режимов качения колеса, системы сцепления и системы АБС, на основе этой модели была создана расчетная модель в ПО Matlab Simulink и получены соответствующие графические зависимости, отражающие важнейшие показатели при качении колеса в различных режимах. Из полученных графиков для последнего режима, учитывающего наличие антиблокировочной системы, видно, что данная система управляет степенью нажатия на педаль торможения и плавно уменьшает частоту вращения колеса, за счет чего повышается эффективность торможения и возрастает управляемость при торможении.