

3,10 Функциональная схема
Функциональная схема системы АРВ-29Д приведена на рис 1.4. Система состоит из двух однотипных каналов автоматического регулирования положения панелей клина ПК воздухозаборника один из которых является основным, а другой резервным. Элементы системы , входящие в основной и резервные каналы автоматического регулирования обозначаются с использованием индексов «О» и «Р» соответственно. Кроме того, система управления входным устройством включает в себя формирователь сигнала коррекции ФСК, логическое устройство ЛУ и встроенную систему контроля ВСК.
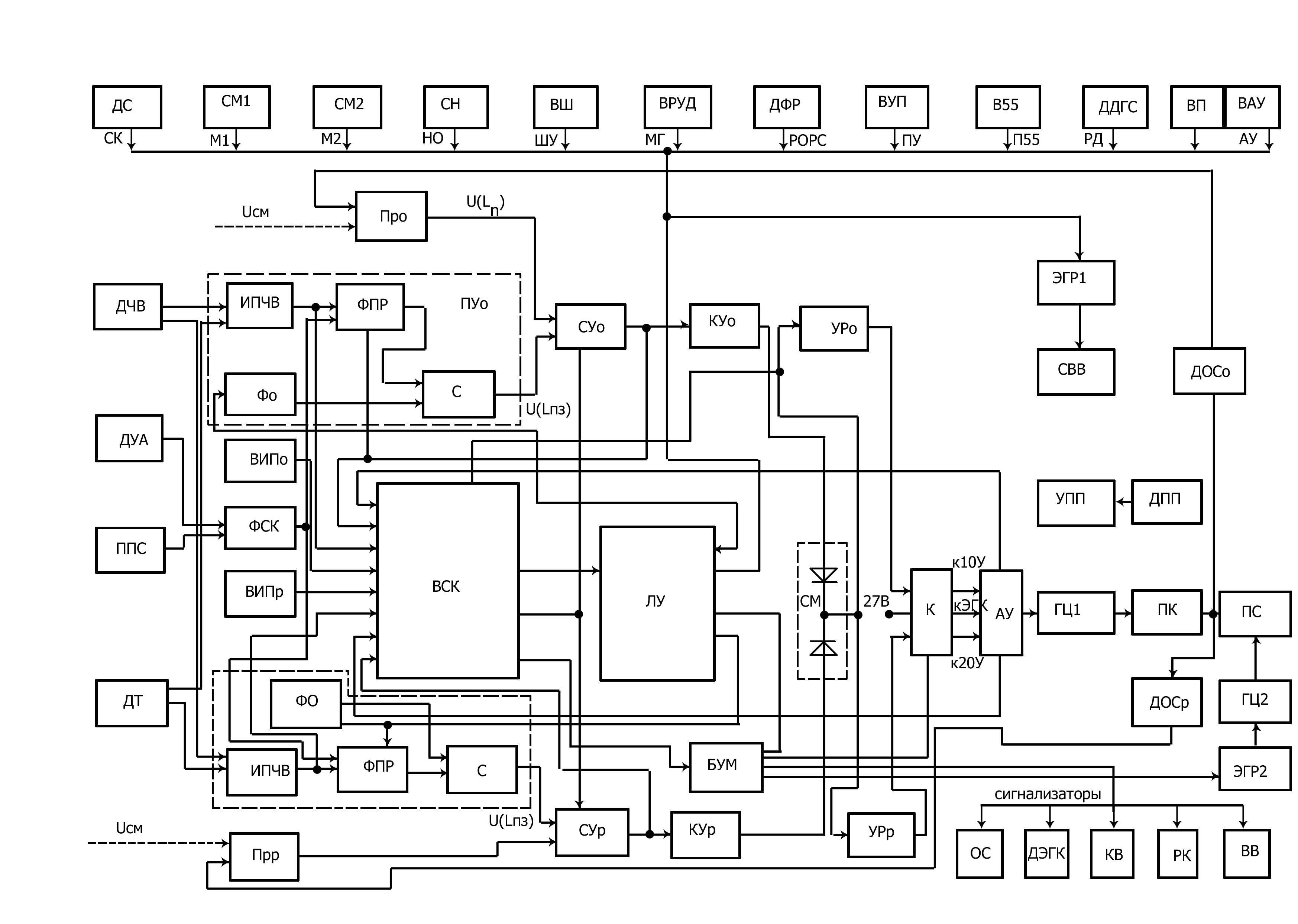
Рис .№.17 Схема автоматического регулирования
Каждый из каналов автоматического регулирования состоит из программ устройства ПУ и силового следящего привода панелей клина. Прогрессивное устройство в соответствии с заданными программами (рис1.2) вырабатывает управляющий сигнал, пропорциональный Lнз Для формирования данного сигнала используется информация от соответствующих датчиков. На рис1.4 введены следующие обозначения датчиков:
ДУВ - датчик частоты вращения компрессора двигателя, имеющий две электрически несвязанные между собой выходные обмотки. Частота импульсов, наводимых в обмотках датчика, пропорционален частоте вращения двигателя.
ДТ- датчик температуры Т в заторможенного потока воздуха на входе в двигатель, имеющий два независимых чувствительных элемента, выполненных в виде спиралей из платиновой проволоки. Электрическое сопротивление Ч.Э. увеличивается с ростом Тв .
ДУА - датчик углов атаки с-та, выходной, сигнал которого пропорционален углу атаки L.
ППС - противоположная система при возникновении компаса двигателя.
Программное устройство каждого из каналов включает.
ИПЧВ – измеритель приведенной частоты вращения, который на основе информации от датчиков ДУВ и ДТ вычисляет текущее значение Ппр .
ФПР – формирователь программ, выходной, сигнал которого соответствует наклонному участку реализуемой в данных условиях полёта программ регулирования.
ФО – формирователь ограничения программ, выходной, сигнал которого пропорционален величине ограничения перемещения панелей клина при работе по 2 и 3 программе.
С – селектор минимума, его выходной сигнал равен наименьшему по величине входному сигналу.
Силовой следящий привод состоит из:
СУ – симулирующего устройства, в котором производится сравнение выходного сигнала ПУ, соответствующего заданному положению панелей сигналом обратной связи, пропорциональный фактическому положению панелей.
КУ – корректирующего устройства, предназначенного для улучшения статических и динамических характеристик системы.
УР – усилитель рассогласования.
АУ – агрегата управления перемещением штока гидроцилиндра ГЦ1 и кинематический связанных с ним панелей клина ПК.
Сигнал обратной связи с выхода системы поступает в суммирующее устройство СУ через датчик обратной связи ДОС индукционного типа и преобразователь ПР.
Дискретные управляющих сигналы при автоматическом регулировании клина, а также на режимах взлета и посадки вырабатываются логическим устройством ЛУ, на вход которого поступает информация от различных датчиков и выключателей:
ВП – выключатель питания системы.
ДС – датчик приборной скорости с-та ,контакты которого замыкаются при достижении приборной скорости значения равного 200км/ч.
СМ1;СМ2 – сигнализатор высоты полета. Контакты которого замкнуты при высоте Н>На
ВШ – концевой выключатель, шасси. Его контакты замыкаются при уборке левой стойки шасси.
ВРУД – выключатель, контакты которого замкнуты , когда РУД установлен в положении, соответствующего режимом выше «Малого газа».
ДФР – датчик фиксаций - расфиксаций створок верхнего входа. Контакты датчика замкнуты при расфиксированных створках.
ВУП – концевой выключатель убранного положения переднее панели. Его контакты замкнуты, если передняя панель полностью убрана.
В55 – концевой выключатель, контакты которого замыкаются при выпуске панелей более чем на 55%
ДДГС – датчик генератора в гидросистеме. Его контакты замыкаются, когда давление Р гидросистеме становится меньше допустимого значения Ро. В гидросистеме становится меньше допустимого значения Ро.
ВАУ – выключатель аварийной уборки панелей клина.
Информации в логическое устройство ЛУ поступает в виде дискретных команд, обозначение которых приведены на схеме обозначениями соответствующих датчиков и выключателей. Сигналы от ЛУ к исполнительным элементам системы поступают через блок усиления мощности БУМ.
К исполнительным элементам системы относятся электрогидравлические распределители ЭГР1 и ЭГР2 и агрегат управления АУ.
ЭГР1 – имеет две обмотки, при подключении которых к источнику питания происходит соответственно фиксация или расфиксация створок входа СВВ.
ЭГР2 – управляет гидроцилиндром ГЦ2, который перемещает переднюю створку ПС клина. При подключении одной из двух его обмоток к источнику питания происходит уборка ПС, при подключении другой – выпуск передней створки.
Исполнительным элементом системы при автоматическом управлении является электрогидравлическим агрегат управления, имеющий три независимых обмотки. Управляющая обмотка гидрокрана АУ обеспечивает подключение АУ и ГЦ1 к гидросистеме самолета. Обмотка подключается коммутатором К к выходу усилителя рассогласовании УР о основного канала регулирования, а обмотка управления 20У к выходу усилителя УРр резервного канала.
Кроме того в системе предусмотрена возможность подключения обмоток 10У и 20У непосредственно к источнику питания 27В.
От ЛУ через БУМ осуществляется также включение сигнализации:
Отказ системы ОС
Отказ электрогидрокрана ОЭГК
Контроля входа КВ
Включение резервного канала управления РК
Верхнего входа.
В системе предусмотрен селектор максимума СМ, выходной, сигнал которого равен максимальному по величине сигналу, поступающих от корректирующих устройств КУо и Кур основного резервного канала.
Благодаря СМ обеспечивается управление положений панелей клина от исправного канала автоматического регулирования.
О фактическом положении панелей клина можно судить по показаниям указателя УПП и датчики обратной связи ДОС объединены в один датчик перемещения типа ДП-133.
Питание элементов системы электроэнергий постоянного и переменного тока различных уровней напряжения осуществляется от встроенных источников питания ВИП ( связи ВИПОВ с элементами системы на рис 1.4 не показаны)
Управление входным устройством на режимах взлёта и посадки.
В исходном положении на земле до запуска АД створки верхнего входа СВВ закрыта, панели воздухозаборника находится в убранном положении, открытый осевой вход.
РУД установлен в положении «стоп»
При включении выключателя ВП (рис1.4) получают все элементы системы.
Включение соответствующей обмотке ЭГР1 приводит к фиксации створок СВВ в закрытом положении.
ЛУ - вырабатывает сигнал на подключение обмотки уборки ЭГР2». Передняя створка ПС клина при этом удерживается в убранном положении при помощи ГЦ2
Кроме того, сигнал от Лу через БУМ подается на коммутатор К, обеспечивающий подключение и источника постоянного напряжения 27В к обмоткам управления АУ При этом ГЦ1 осуществляет уборку клина
При запуске двигателя РУД устанавливается на упор «Малый газ». По сигналу»МГ» от выключателя ВРУД.
На обмотке расфиксации ЭГР1 подается напряжение и происходит расфиксация створок СВВ. После окончания процесса расфиксации СВВ на выходе датчика ДФР появляется сигнал «РФС» ЛУ выдает команду на подключение обмотки выпуска ЭГР2. В результате передняя створка выпуска ПС клина с помощью штока ГЦ2 перемешается в полностью выпушенное взлетно-посадочное положение Воздух в двигатель после этого поступает через верхний вход, осевой вход закрыт.
Перемещение створки взлетно- посадочного положения возможно только при полностью убранном клине воздухозаборника , что обеспечивается гидросистемой с-та.
Одновременно ЛУ выдает сигнал на формирователи программ ФПР и формирователи ограничения ФО основных и резервных каналов, обеспечивая включение первой программы регулирования для проведения контроля работоспособности системы на земле.
На взлете, когда приборная скорость превышает 200км/ч ,на выходе датчика ДС появляется сигнал «СК».
В этом случае ЛУ формирует команду на уборку передней створки ПС. Сигнал с ЛУ поступает на обмотку уборки ЭГР2, в результате шток ГЦ2 перемещает створку ПС в полностью убранное положение прижимая его к раме передней панели клина. Осевой вход воздухозаборника открывается.
Кроме того, ЛУ формирует сигнал поступающий на формирователи ФПРо, ФПРр , ФОо , Фор обеспечивающие переход на 3 программу регулирования.
При полностью убранном ПС срабатывает концевой выключатель убранного положения створки ВУП и выдает сигнал «ПУ», при этом срабатывает гидропереключатель в гидросистеме самолета(на рис1.4 не показан) и выдается разрешение на перемещение клина в сторону выпуска. Таким образом, выпуск клина возможен только при полностью убранной ПС.
Далее ,после уборки шасси на выходе концевого выключателя ВШ появляется сигнал «ШУ» и при наличии сигнала «ПУ» от ЛУ на коммутатор К поступает сигнал, обеспечивающий подключение обмотки управления 20У агрегата АУ к основного каналу. Система подготовлена к работе в режиме автоматического регулирования
Если до момента уборки шасси передняя створка клина не займет полностью убранного положения , ЛУ выдает команду на сигнализатор верхнего входа ВВ и включение речевой информации: «Верхний вход. Не разгоняется выше 0.8», что свидетельствует о неисправности системы.
При посадке с-та , когда М < М1 и выпущенные шасси ЛУ формирует сигнал на коммутатор К. При этом обмотки управления 10У и 20У агрегата АУ подключается к источнику 27В. Клин перемещается в полностью убранное положение.
При дальнейшем положении, когда V<200км/ч пропадает сигнал «СК» и ЛУ выдает команду на выпуск передней створки клина. Створки ПС перемещаются во взлетно-посадочное положение закрывая осевой вход. При остановке двигателя, когда РУД переводится в положение «СТОП» производится фиксация створки СВВ в убранном положении, после чего ЛУ выдает сигнал на ЭГР2 для уборки ПС.
Передняя створка перемещается в полностью убранное положение, открывая воздухозаборник для осмотра и провидения регламентных работ в каналах входных устройств.
Автоматическое управление панелями клина.
При достижении V=200км/ч и после уборки шасси система переходит на режим автоматического регулирования положения панелей клина в соответствии программами, изображенных на рис 1.2 Работу системы рассмотрим на пример функционирование основного канала автоматического регулирования (рис 1.4)
Сигнал пропорциональный Ппр, вырабатывается измерители ИПЧВ. Выходной сигнал ИПЧВ поступает на формирователь программ ФПР, на другой вход которого подаётся сигнал коррекции от формирователя ФСК. Формирователь сигнала коррекции ФСК при наличии на вход сигналов с ДУА и ППС вырабатывается корректирующее воздействие, соответствующее дополнительному выдвижению панелей Lпз . Формирователь программы ФПР в зависимости от высоты Н и числа М полёта, вырабатывает сигнал, соответствующий наклонному участку реализуемой в данных условиях полета программы регулирования. Выбор программы производится по управляющему сигналу, поступающему ФПР от логического устройства.
При регулировании использовании 2 и 3 программы выходной сигнал ФПР сравнивается в селектор. С выходным сигналом формирования ФО. Который пропорционален предельному, допустимому перемещению панелей клина для использования в данный момент программы. Сигнал на выходе селектора С равен тому из выходных сигналов, который имеет наименьшую величину.
Выходной сигнал ПУо сравнивается в СУо с сигналом обратной связи, пропорциональным фактическому перемещению панелей клина Lп.
Сигнал ОС формируется датчиком ДОСо в виде напряжений тока и поступает на преобразователь ПР0 , в котором осуществляется его выпрямление.
Если Lп не равен Lпз ,на выходе СУ0 появляется сигнал рассогласования, который поступает на КУ0 . Последовательное КУ0 улучшает статистические динамические характеристики. Выходной сигнал КУ0 подается на селектор максимума СМ, выбирающий и передающий на вход усилителя рассогласования УР0 максимальный из сигналов снимаемых с КУо и Кур. При исправном основном канале регулирования СМ обеспечивает поступление на вход усилителя Уро сигнала с КУ0.
Выходной сигнал усилителя Уро выдается на управляющую обмотку 10У агрегата АУ В результате происходит перемещение панели клина ПК до тех пор, пока не будет ликвидировано рассогласование и панели не займут заданного программой регулировании положения.
При отказе в основном канале- система переходит на резервный канал по сигналам ВСК и АУ.