

Способы выполнения девиационных работ
Назначение девиационных работ. Общая девиация магнитных систем является суммой девиаций от воздействия на магнитную систему электромагнитного и магнитного полей самолета, а также инерционных сил. Пользоваться магнитными компасами, у которых величина девиации не известна и не устранена, практически невозможно. Для полного или частичного устранения (уменьшения) девиации проводятся специальные девиационные работы.
Девиация от инерционных сил, возникающих в полете, уменьшается конструктивным путем и выбором места установки датчика компаса на самолете. Для уменьшения девиации от электромагнитных сил датчик компаса устанавливают по возможности дальше от источников девиации, а также применяют специальные экраны.
Постоянная (круговая), полукруговая, четвертная девиации от действия магнитных масс самолета частично компенсируются, а остаточная девиация определяется и учитывается с помощью графиков при измерении курса.
Девиационные работы на самолете в соответствии с Инструкцией по определению и устранению девиаций проводятся два раза в год. Кроме того, эти работы проводятся при замене компасов, курсовых систем, магнитных датчиков, при подготовке к особо важным полетам, при перебазировании в высокие широты и в ряде других случаев. Девиационные работы на самолетах и вертолетах выполняются на земле при неработающих двигателях. Но при этом включается электро- и радиооборудование, работающее в полете большую часть времени. На вертолетах Девиационные работы для получения более точных данных могут проводиться с работающим двигателем.
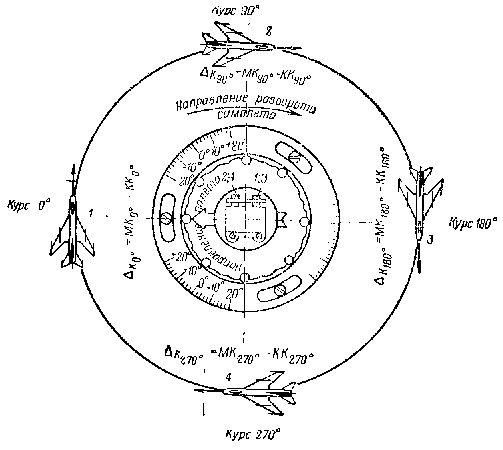
Девиацию курсовых систем определяют путем сравнения показаний указателя курсовой системы, работающей в режиме магнитной коррекции, с истинным курсом самолета (вертолета). Для этого самолет (вертолет) последовательно устанавливают на восемь основных магнитных курсов: 0, 45°, 90°, 135°, 180°, 225°, 270°, 315° и одновременно отсчитывают компасные курсы. Разность между магнитным и компасным курсами будет девиацией курсовой системы на данном магнитном курсе.
Девиационные работы обычно состоят из следующих основных этапов:
- из подготовки к выполнению девиационных работ;
- из устранения установочной ошибки датчика (постоянной девиации), компенсации полукруговой и четвертной девиации;
- из определения остаточной девиации;
- из проверки правильности определения остаточной девиации в полете.
Подготовка к выполнению девиационных работ. Перед началом девиационных работ проводится подготовка наземного оборудования (девиационный пеленгатор, девиационные магниты, антимагнитная отвертка), выбирается площадка, определяются магнитные пеленги ориентиров, подбираются бланки технической документации, самолет или вертолет устанавливается на площадку и включается курсовая система.
При выполнении девиационных работ применяется девиационный пеленгатор (рис
. 17), предназначенный для определения магнитных пеленгов и курсовых углов. Основными частями пеленгатора являются лимб / или азимутальный круг, алидада с визирным устройством (диоптры) 2, компасная стрелка 3 и кронштейн 4. Азимутальный круг имеет шкалу с делениями от 0 до 360° и уровень для установки в горизонтальное положение. Алидада состоит из линейки, которая может вращаться относительно центра азимутального круга, и двух подъемных диоптров: глазного и предметного. Глазной диоптр выполнен в виде планки с визирной щелью, а визирный — в виде планки с натянутой нитью. Для грубой наводки глазной диоптр имеет прорезь, а предметный — мушку.
Рисунок 17

Девиационный пеленгатор
1 – лимб, 2 – диоптры, 3 – компасная стрелка, 4 – кронштейн, 5 - тренога
На концах алидады имеются риски для отсчетов пеленгов по шкале азимутального круга. Азимутальный круг с помощью шарового шарнира соединен с кронштейном, который служит для установки пеленгатора
на треноге или для крепления его к выступающим частям самолета.
Девиационные работы проводятся в специально отведенном месте, на девиационном поворотном антимагнитном круге, грунтовой или бетонной площадке, где магнитное поле однородно, постоянно и не меняется более чем на ±0,25°, а горизонтальная составляющая Я полного вектора напряженности магнитного поля Земли изменяется не более чем на 0,005 э (500 гамм). Площадка для проведения девиационных работ должна быть открытой, ровной, с хорошим обзором по горизонту и на одиться на расстоянии не менее 150—200 м от стоянок самолетов и строений, от стальных конструкций, линий высоковольтных передач; от металлических ВПП площадка должна быть удалена на 300—400 м.
В центре площадки устанавливают девиациоиный пеленгатор и ориентируют лимб по магнитному меридиану так, чтобы его нулевое деление было против южного конца магнитной стрелки пеленгатора. После этого определяют магнитные пеленги одного или двух ориентиров, удаленных от площадки на расстояние не менее 2,5— 3 км. (Пеленгом называется угол между магнитным меридианом и направлением на удаленный предмет.) Второй ориентир является запасным на тот случай, если первый окажется во время выполнения девиационных работ закрытым.
Минимальное расстояние до пеленгуемого ориентира должно обеспечить наименьшие ошибки в измерении пеленга из-за неточной установки самолета на место, где стоял пеленгатор. Например, если расстояние до ориентира 2,5 км, то неточность установки центра масс самолета относительно центра площадки в радиусе 10 м вызовет изменение магнитного пеленга в пределах ±0,25°. Этой величиной можно пренебрегать.
После измерения пеленгатором (рис.18) магнитных пеленгов ориентиров (МПО) вычисляют курсовые углы ориентиров (КУО) для выбранных магнитных курсов (МК) по формуле
КУО = МПО - МК.
Рисунок 18
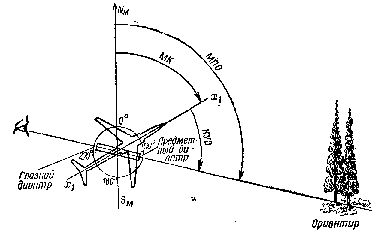
Схема измерения углов пеленгатором
Например, для МПО = 160° курсовые углы ориентиров при устранении девиации на 8 магнитных курсах будут иметь следующие значения:
|
МК |
0 |
45° |
90° |
135° |
180° |
225° |
270° |
315° |
|
КУО |
160° |
115° |
70° |
25° |
340° |
295° |
250° |
205° |
Если МПО окажется меньше МК, то при вычислении КУО к значению МПО необходимо добавить 360°. Таким же способом составляется таблица курсовых углов второго ориентира. После определения магнитных пеленгов и курсовых углов ориентиров пеленгатор снимается и на его место устанавливается самолет.
Проведение девиационных работ.
Одномоторныепоршневые самолеты при проведении девиационных работ устанавливаются в линию горизонта, чтобы исключить и, ошибки на курсах 90° и 270° из-за креновой девиации. Самолеты с трехколесным шасси устанавливаются в трехточечном стояночном положении. Затем на самолете крепится девиационный пеленгатор так, чтобы линия 0—180° лимба была параллельна продольной оси самолета. Для этого можно воспользоваться метками на самолете или провизировать самолет с помощью пеленгатора. При визировании самолет устанавливается на курс 0, сзади самолета ставится девиационный пеленгатор и визируется направление продольной оси самолета (рис. 19). Пеленгование самолета производится по реперным точкам, которые соответствуют продольной строительной оси .самолета.
Линия 0—180° пеленгатора совмещается с линией визирования и из этого положения определяется курсовой угол ориентира. Пеленгатор переносится на самолет и укрепляется в таком месте, чтобы был обеспечен хороший круговой обзор (обычно пеленгатор крепят к переднему козырьку остекления кабины). Лимб по уровню устанавливают в горизонтальное положение. Рамку с диоптрами разворачивают так, чтобы против нулевого деления рамки было деление, соответствующее измеренному курсовому углу ориентира. Затем вращают лимб, удерживая его в горизонтальной плоскости, до тех пор пока не будет завизирован ориентир, для которого был вычислен курсовой угол, и стопорят его зажимом. В результате этого линия О—180° лимба будет параллельна продольной оси самолета.
Установку самолета на основные курсы производят по вычисленным курсовым углам ориентира. Например, для установки самолета на курс 0 устанавливают нулевой индекс диоптров против деления 180° на лимбе и разворачивают самолет до тех пор, пока не будет завизирован ориентир. Линия 0— 180° лимба пеленгатора и продольная ось самолета при этом будут
ориентированы по магнитному меридиану. После этого снимаются показания указателя курсовой системы и высчитывается девиация для данного курса по формуле Δk0=МК-КК.
Рисунок 19

Визирование направления продольной оси самолета
В такой же последовательности определяется девиация на всех остальных курсах. После определения девиации на основных курсах приступают к компенсированию установочной ошибки.
Рисунок 20

Установление установочной ошибки
Рисунок 21
Устранение полукруговой девиации
Для определения установочной ошибки (постоянной девиации) (рис. 20) вычисляют алгебраическую сумму девиаций компаса на курсах 0, 90°, 180°, 270° и полученную сумму делят на 4:

Установочная ошибка может быть также определена, если девиацию на курсах 0 и 90° с помощью девиационного прибора довести до 0°, а девиации на курсах 180° и 270° сложить и разделить на 4.
Компенсирование ошибки следует производить в том случае, если величина Δк уст окажется больше ±1°. Установочную ошибку компенсируют поворотом датчика на угол Δк уст. При положительном значении Δк уст датчик поворачивают против хода часовой стрелки, при отрицательном — по ходу часовой стрелки.
Полукруговая девиация устраняется путем создания магнитного поля, обратного по направлению полю, вызывающему девиацию. Для этого используются магниты-уничтожители, заделанные в валики девиационных приборов (рис.21). Девиационные приборы устанавливаются вблизи магнитной системы. Компенсирование полукруговой девиации производится поворотом магнитов-уничтожителей относительно магнитной системы компаса на соответствующий угол. Чтобы поворот магнитов-уничтожителей был выполнен на угол, обеспечивающий компенсирование полукруговой девиации, работы выполняют в такой последовательности:
- устанавливают самолет на магнитный курс 0 и удлинителем С — Ю доводят девиацию до нуля;
- разворачивают самолет на магнитный курс 180° и тем же удлинителем доводят девиацию до половины первоначального значения;
- на магнитном курсе 90° доводят девиацию до нуля удлинителем В — 3;
- тем же удлинителем на курсе 270° девиацию доводят до половины первоначального значения.
Если первоначальная девиация меньше 10°, то на курсах 0 и 90° девиация не компенсируется. На курсе 180° девиация удлинителем С — Ю доводится до значения 0,5 (Δк0 + Δк180 ). На курсе 270° девиация удлинителем В — 3 доводится до значения 0,5 (Δк90 + Δк270).
Результаты работы по компенсированию девиации заносят в протокол. После устранения полукруговой девиации винт хомутика на валиках девиационного прибора затягивают и контрят латунной проволокой.
У курсовых систем с помощью механического лекального устройства компенсируются четвертная девиация и статические инструментальные погрешности. Регулировкой лекального устройства в показания компаса вводится поправка, равная по величине и противоположная по знаку четвертной девиации и инструментальной погрешности. Устранение четвертной девиации производится на 24 магнитных курсах через каждые 15° (рис. 22).
Рисунок 22

Устранение четвертной девиации
Последовательная установка самолета на каждый из 24 магнитных курсов осуществляется 'с помощью пеленгатора. После установки самолета на заданный курс специальной отверткой поворачивается винт лекального устройства, соответствующий заданному курсу. Поворотом винта изменяется профиль лекала, и показания курсовой системы согласуются с курсом, заданным по пеленгатору.
После компенсирования постоянной, полукруговой и четвертной девиации определяют остаточную девиацию на 8 курсах. Для этого самолет устанавливают на заданные магнитные курсы по астрокомпасу, звездно-солнечному ориентатору или девиационному пеленгатору и находят остаточную девиацию по формуле ΔК = МК—КК. Ее величина не должна превышать 2—5°. Значения остаточной девиации вносятся в протокол выполнения девиационных работ и на основании этих данных составляются графики поправок.
После выполнения девиационных работ на земле экипаж самолета (вертолета) должен проверить в воздухе правильность показаний курсовой системы и графики остаточной девиации. Показания курсовой системы в полете можно проверить с помощью астрокомпаса, звездно-солнечного ориентатора и пеленгованием линейного ориентира, магнитный пеленг которого известен.
При определении остаточной девиации с помощью астрокомпаса последовательно выполняют полет на проверяемых курсах. Девиация определяется как разность между истинным курсом, измеренным астрокомпасом, и компасным курсом с учетом магнитного склонения
ΔК = ИК-(КК± Δ М).
Для определения остаточной девиации в полете пеленгованием линейного ориентира на основных курсах рассчитываются курсовые углы и выбираются последовательные курсы для пересечения линейного ориентира. В момент пересечения самолетом линейного ориентира отсчитывают показания курсовой системы и значение фактического курсового угла по показаниям визира. Фактические магнитные курсы самолета в момент пересечения линейного ориентира и остаточная девиация определяются по формулам:
МКф=МП-КУф
Δ к = МКФ - ККФ.
На истребителе и вертолете для определения девиации в полете выбирают характерный прямолинейный ориентир и выполняют полет параллельно ему. После посадки на карте измеряют магнитный пеленг ориентира и вычисляют девиацию курсовой системы по формуле ΔКк = МПО - ККФ)
где ККф — среднее показание курсовой системы при полете параллельно ориентиру.
Данные, полученные в результате расчетов по приведенным формулам, используются для уточнения графиков девиации.