

3.2. Управление рулем направления
Путевое управление самолетом осуществляется рулем направления. Управление рулем направления может производиться одновременно двумя пилотами или раздельно - командиром ВС или вторым пилотом.
Руль направления приводится в действие через пружинный сервокомпенсатор двумя парами педалей, используя в качестве силового привода однокамерный гидроусилитель. Гидроусилитель установлен в системе управления рулем направления по необратимой схеме. В качестве имитатора усилий, которые создается на педалях, использован пружинный механизм загрузки.
Конструкция гидроусилителя обеспечивает:
- возможность пилоту преодолевать мощность гидроусилителя воздействием на педали усилием до 70 кгс;
- просадку гидроусилителя при увеличенном шарнирном моменте на руле направления и управление рулем направления при этом с преодолением дополнительного усилия на педалях;
- автоматический переход на безбустерное ножное управление рулем направления при падении давления в основной гидросистеме ниже 10 кгс/см2.
Полному ходу педалей, равному +-115 мм соответствует отклонение руля направления на угол +-30° и отклонение сервокомпенсатора на +-20°. Предельные отклонения руля направления ограничивается регулируемыми упорами, установленными непосредственно на руле. Демпфирование боковых краткопериодических колебаний самолета по курсу обеспечивает двухканальный автономный демпфер рыскания АДР-42. Автономный демпфер рыскания представляет собой две независимые друг от друга автоматические следящие системы, в которых ход исполнительных механизмов пропорционален угловой скорости рыскания самолета. При включении системы автоматического управления САУ-42 автономный демпфер рыскания АДР-42 автоматически отключается и демпфирование боковых краткопериодических колебаний самолета по курсу обеспечивается демпфером рыскания САУ-42. Контроль работы АДР-42 осуществляется по светосигнализаторам, расположенным в кабине экипажа.
Для ограничения нагрузок, действующих на вертикальное оперение, в проводке управления рулем направления установлен механизм ограничения хода педалей. Этот механизм ограничивает вдвое ход педалей и соответственно углы отклонения руля направления во время полета с убранным шасси путем создания дополнительной нагрузки на педалях. При выпущенном шасси руль направления отклоняется на полный угол. Введение и снятие ограничения углов отклонения руля направления автоматическое, по сигналу концевых выключателей убранного положения главных стоек шасси. В случае отказа автоматического снятия ограничения хода педалей обеспечивается отклонение руля направления на полный угол, но с преодолением дополнительного усилия на педалях. Контроль работы механизма ограничения хода педалей осуществляется по светосигнализатору, расположенному в кабине экипажа.
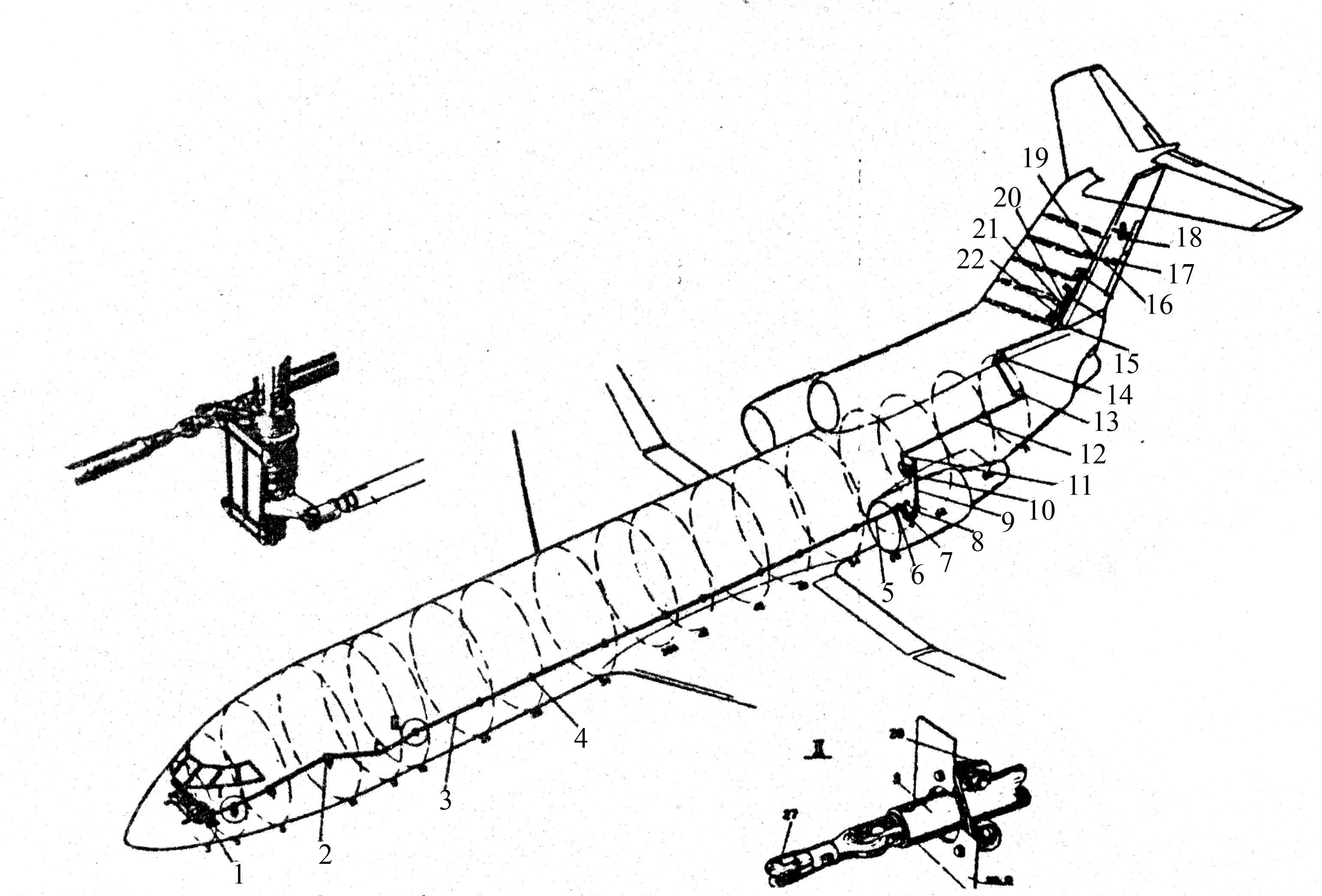
Рис.11. Схема управления рулём направления
1 – педали; 2 – качалка; 3 – тяга; 4 – люнет; 5 – промежуточная тяга;
6 – гермовывод; 7 – механизм ограничения хода педалей; 8 – качалка; 9 – тяга;
10 – механизм загрузки; 11 – качалка; 12 – тяга; 13 – качалка; 14 – качалка;
15 – качалка; 16 – качалка; 17 – качалка механизма управления сервокомпенсатором; 18 – механизм управления триммером; 19 – качалка;
20 – качалка сектора; 21 – сектор; 22 - рулевая машина РД12; 23 – тяга;
24 – качалка механизма переключения системы управления поворотом передней ноги; 25 – тяга; 26 – кронштейн; 27 – тяга; 28 – направляющий ролик люнета; 29 - гидроусилитель БУ-27ОА; 30 – рулевые агрегаты управления РАУ-108. вар. 2.
Для уменьшения усилий, действующих в проводке управления от шарнирного момента при безбустерном управлении, на руде установлен сервокомпенсатор. Для путевой балансировки самолета на руле направления установлен триммер. Управление триммером электромеханическое, дистанционное, сервокомпенсатор отклоняется автоматически при отклонении руля направления. На стоянке самолета руль направления стопорится в нейтральном положении.
Две пары педалей, установленные в кабине экипажа, кинематически связаны между собой и с рулем направления при помощи жесткой проводки, состоящей из тяг и качалок. Перемещение педалей передается тягами на качалки, установленные на шпангоутах 5, В, 14, 17, и далее к тяге 3 (рис.11), перемещающейся в девяти люнетах 4 от шпангоута 19 до шпангоута 54. Тяга 3 соединена промежуточной тягой 5, проходящей через гермовывод на шпангоуте 59, с качалкой 8, установленной на кронштейне механизма ограничения хода педалей 7. Качалка 6 связана тягой 9 с качалкой 11, установленной в верхней части шпангоута 59 на кронштейне механизма нагрузки педалей 10. На участке от шпангоута 59 до шпангоута 71 движение передается тягой 12, перемещающейся в двух люнетах. На шпангоуте 71 установлена качалка 13, от которой движение передается на качалку 14, установленную на обшивке фюзеляжа около шпангоута 71. Затем проводка проходит в киле к угловой качалке 15 и вдоль третьего лонжерона киля к качалкам, на которых закреплены исполнительные механизмы автономного демпфера рысканий АДР-42 рулевые агрегаты управления РАУ-108 вар. 2. Угловая качалка 15 проводки управления рулем направления связана и с качалкой сектора, который тросами связан с барабаном рулевой машины РД-12 системы автоматического управления САУ-42. Рулевая машина РД-12 обеспечивает демпфирование краткопериодических колебаний самолета по курсу при включенной системе САУ-42. Далее движение передается на качалку, связанную с входным звеном гидроусилителя. Перемещения гидроусилителя ограничиваются упорами на качалке. Гидропитание гидроусилителя руля направления и пружинного механизма за грузки педалей осуществляется автоматически при наличии давления в основной гидросистеме самолета через электромагнитный кран ГА 165.
При необходимости гидропитание гидроусилителя руля направления отключается установкой переключателя АВАР.ОТКЛ.ГИДРО АДР в положение "отключено". При отключении гидропитания или при падении давления в гидросистеме гидроусилитель переходит на работу в режиме "жесткой тяги" (безбустерный режим), и механизм загрузки педалей автоматически выключится из системы управления рулем направления. Гидроусилитель передает движение по тяге на угловую качалку, установленную на нервюре 13 киля. Качалка связана тягой с качалкой 16, передающей движение на качалку 17, установленную на лонжероне руля направления, и через промежуточную качалку на сервокомпенсатор руля направления. К качалке, установленной на лонжероне руля направления, шарнирно крепится и пружинный цилиндр сервокомпенсатора руля направления. Второй конец пружинного цилиндра крепится к кронштейну в носке руля направления.
Руль направления и тормоза колес Основных опор шасси управляются п е д а л я м и, расположенными в кабине экипажа перед колонками управления. Обе пары педалей соединены между собой тягой так, что отклонение одной пары сопровождается таким же отклонением другой пары. Педали регулируются по росту пилота переключателем РЕГУЛИРОВКА ПЕДАЛЕЙ, установленным для левых педалей на левом пульте кабины экипажа, для правых педалей - на правом.
Каждая пара педалей состоит из двух стоек 11 (рис.12), двух педалей 1, двух тяг 14, оси 24, качалки 18 и механизма регулировки педалей, включающего в себя качалки 16 и 25, два звена 19, корпус механизма 20 с ползуном 23, винтом 29, гайкой 28 и электромеханизма УТ-10В. Стойки установлены в подшипниках кронштейнов под полом кабины экипажа между шпангоутами 3 и 4. В средней части стоек присоединены тяги, передающие движение качалкам 16 и 25. Качалки свободно надеты на ось 24, но зафиксированы от поворота относительно оси звеньями 19, связывающими качалки с ползуном 23. Ось установлена в подшипниках кронштейна 15, закрепленного на шпангоуте 3. На нижнем конце оси конусными болтами закреплена качалка 18, которая тягой 26 связана с аналогичной качалкой правых педалей. Плечи этих качалок служат одновременно ограничителями отклонения педалей, упираясь в регулируемые уборы 17 на внешних стенках кронштейнов 15. На левых педалях качалка 18 имеет второе плечо, к которому присоединена тяга, идущая к рулю направления. Верхняя часть оси заканчивается фланцем к которому болтами крепятся фланец корпуса механизма регулировки положения педалей, По цилиндрической поверхности корпуса 20 может перемещаться ползун, получающий движение от гайки. Сухари 27, связывающие ползун с гайкой, скользят по прорезям в корпусе и фиксируют ползун и гайку от поворота. Гайка перемещается винтом, связанным с электромеханизмом УТ-10В шлицевой муфтой. Ползун через звенья, качалки, тяги перемещает стойки с педалями, правую и левую вместе. Полный ход механизма УТ-10B в каждую сторону сопровождается перемещением неотклоненных от нейтрали педалей на 60 мм вперед иди на 80 мм назад. В верхней части стоек 11 на подшипниках установлены оси 5. На внутренних концах осей конусными болтами закреплены рычаги 2, которые соединяются звеньями с педалью 1. На внешних концах осей 5 также конусными болтами закреплены качалки 4, связанные тягами 9 с качалками 10. Качалки 10 при отклонении педалей нажимают закрепленными на них роликами на гильзы редукционных клапанов УГ-149 тормозной системы. Положение нажимных роликов на качалках регулируется накладками. В исходном положении при расторможенных колесах качалки удерживается пружинами.

Рис.12. Педали
1 – педаль; 2 – качалка; 3 – корпус; 4 – качалка; 5 – ось; 6 – подножка; 7 – тяга управления РН; 8 – пружина; 9 – тяга; 10 – качалка; 11 – стойка;
12 – кронштейн; 13 – редукционный клапан УГГ49; 14 – тяга; 15 – кронштейн; 16 – качалка; 17 – регулируемый упор; 18 – качалка; 19 – звено; 20 – корпус механизма регулировкой педалей; 21 – электромеханизм УТ-10В;
22 – кронштейн; 23 – ползун; 24 – ось; 25 – качалка; 26 – тяга; 27 – сухарь;
28 – гайка; 29 – винт; 30 – конусный болт.
Г е р м о в ы в о д проводки управления руля направления из герметичной зоны фюзеляжа в негерметичную аналогичен по конструкции гермовыводу проводки управления руля высоты, но находится на 59 шпангоуте у правого борта.
М е х а н и з м ограничения хода педалей ограничивает ход педалей и соответственно углы отклонения руля направления созданием дополнительного сопротивления на педалях при их перемещения на ход, соответствующий отклонению руля направления на угол более чем +-15о в полете с убранными шасси.
Механизм ограничения хода педалей установлен в проводке управления руля направления вне гермосалона на шпангоуте 59 и ограничивает ход качалки 3 (рис.13), и соответственно педалей, вдвое. Основными элементами механизма ограничения являются пружинный цилиндр 9, два электромеханизма ШП-100М-2 сер. и ряд качалок, установленных на едином кронштейне 15. Два параллельно работающие злектромеханизма обеспечивают дублированное срабатывание механизма ограничения хода педалей на введение ограничения. В положении, когда штоки электромеханизмов убраны (шасси самолета выпущено), ход качалки обеспечивает полное перемещение педалей и отклонение руля направления на полный угол. Штоки электромеханизмов, выдвигаясь, передают движение на пружинный цилиндр и с помощью звеньев на качалку с нажимным винтом. В положении, когда штоки электромеханизмов выпущены (шасси самолета убрано), ход качалки ограничивается вдвое упорной поверхностью 6 пружинного цилиндра 9 с одной стороны и упором качалки 2, получающей перемещение от пружинного цилиндра через ряд качалок и звеньев с другой. Руль направления отклоняется до углов ограничения без дополнительной загрузки педалей. Дальнейшее перемещение педалей приводит к механическому пересиливанию ограничения хода педалей путем обжатия пружинного цилиндра, и тем самым создается дополнительный "скачок" усилий на педалях.
Имитация усилия на педалях от аэродинамической нагрузки на руле направления осуществляется механизмом загрузки педалей.
М е х а н и з м загрузки педалей установлен в проводке управления рулем направления вне гермосалона на шпангоуте 59. Основными элементами механизма загрузки являются пружинный цилиндр 12 (рис.14), качалка 6 и ряд звеньев, смонтированных на едином кронштейне 1, Включение механизма загрузки сблокировано с гидроусилителем руля направления и осуществляется автоматически при наличии давления в основной гидросистеме через электромагнитный кран ГА-165. управление которого производится переключателем АВАР.ОТКЛ.ГИДРО АДР, расположенным на левом вертикальном пульте. При подаче давления в гидрополость пружинного цилиндра поршень обеспечивает сжатие пружины при перемещении штока. При перемещении проводки управления рулем направления обжимается пружинный цилиндр механизма загрузки, усилие которого передается на педали и создает на них имитацию аэродинамической нагрузки от руля направления. Прирост величины усилия на педалях пропорционален увеличению угла отклонения руля направления.
При отключении гидроусилителя или падения давления в основной гидросистеме механизм загрузки автоматически выключается из системы управления рулем направления.

Рис.13. Механизм ограничения хода педалей
1 – тяга; 2 – качалка; 3 – качалка; 4 – винт нажимной; 5 – ролик; 6 – упор;
7 – качалка; 8 – звено; 9 – цилиндр; 10 – качалка; 11 – качалка; 12 – ролик;
13 – качалки; 14 – электромеханические приводы МП-100М-2 сер.;
15 – кронштейн.
Двухканальный А В Т О Н О М Н Ы Й демпфер рыскания АДР-42 предназначен для улучшения характеристик боковой устойчивости м управляемости самолета на всех режимах полета при выключенном деыпфере рыскания системы автоматического управления САУ-42.

Рис.14. Механизм загрузки педалей
1 – кронштейн; 2 – звено; 3 – качалка; 4 – нажимной винт; 5 – ролик; 6 – качалка; 7 – звено; 8 – рычаг; 9 – звено; 10 – тяга; 11 – качалка; 12 – цилиндр.
Автономный демпфер рыскания АДР-42 представляет собой две независимые друг от друга автоматические следящие системы, в которых ход исполнительных механизмов - рулевых агрегатов управления РАУ-108-npoпорционален угловой скорости рыскания самолета.
Чувствительным элементом АДР-42 является датчик угловой скорости относительно вертикальной оси самолета. В комплект АДР-42 входят:
- два датчика угловой скорости ДУСУ1-6АС;
-два усилителя УС-52-01;
- два рулевых агрегата РАУ-108-2вар.;
- амортизированная монтажная рама МР-74;
- щиток ППС.

Рис.15. Рулевые агрегаты управления РАУ-108 вар. 2
1 – кронштейн; 2– кронштейн; 3 – качалка; 4 – качалка; 5 – тяга; 6 – рулевые агрегаты управления РАУ-108 вар.; 7 – тяга; 8 – кронштейн; 9 – качалка;
10 – качалка; 11 – тяга; 12 – сектор; 13 – тяга; 14 – рулевая машина РД12;
15 – кронштейн; 16 – кронштейн; 17 – качалка; 18 – качалка.
Переключатели каналов АДР1 и АДР2 расположены на среднем пульте управления самолетом и зафиксированы крышками во включенном положении. Включение АДР-42 в работу происходит автоматически по снятию сигнала концевых выключателей обжатия основных стоек шасси и нормальном давлении в основной гидросистеме самолета. В полете с убранной механизацией крыла работает только один из каналов АДР-42. В полете с выпущенной механизацией крыла работают одновременно оба канала. При отклонении штурвала на +-45° рулевые агрегаты управления РАУ-108 отрабатывают на полный ход (13 мм), что соответствует отклонению руля направления на угол +-10° (рис.15).
При включении демпфера рыскания САУ-42, а также в случае отключения гидропитания бустера руля направления или падения давления в основной гидросистеме самолета, АДР-42 автоматически отключается рулевые агрегаты РАУ-108 "обнуляются" и работают в режиме "жесткой тяги", а демпфирование самолета по курсу осуществляется демпфером рыскания САУ-42. Исполнительным механизмом демпфера рыскания САУ-42 является рулевая машинка РД-12.
Контроль за работой автономного демпфера рыскания АДР-42 осуществляется по загоранию зеленых сигнальных табло АДР-1I ВКЛЮЧЕНО и АДР-2 ВКЛЮЧЕНО, расположенных на верхнем пульте, по миганию ЦСО ПHО и по желтым сигнальным табло ОТКАЗ AДP-1 и ОТКАЗ АДР-2. расположенных на верхнем пульте.
Датчики угловой скорости ДУСУ1-6АС расположены в нише шасси в районе шпангоута 44. Усилители УС-52-01 установлены в отсеке оборудования между шпангоутами 8-10, слева; рулевые агрегаты управления РАУ-108 - в проводке управления руля направления между нервюрами 7-12 киля за третьим лонжероном; щиток ПНО - на шпангоуте 7, слева.
С е р в о к о м п е н с а т о р предназначен для автоматического уменьшения усилия от шарнирного момента, передающегося на проводку управления рулем направления и установлен в задней части руля направления снизу.
Конструкция и работа сервокомпенсатора РН аналогичны сервокомпенсаторам элеронов.
На земле при ненагруженном руле направления перемещение педалей на 94 мм отклоняет руль направления до упоров на угол +-30°. Дальнейшее отклонение педалей обжимает пружину в цилиндре и поворачивает рычаг сервокомпенсатора. При полном перемещении педалей на +-115 мм сервокомпенсатор отклоняется в сторону, обратную отклонения руля на +-20°.
В полете, когда шарнирный момент руля направления превысит момент начальной затяжки пружины цилиндра, пружина обжимается и сервокомпенсатор отклоняется в сторону, противоположную отклонению руля направления. Возникающий за счет этого момент относительно оси руля направления дополнительно отклонит руль в нужном направлении и уравновесит его. Отклонению педалей противодействует не шарнирный момент руля направления, а момент обжатой пружины в цилиндре и шарнирный момент сервокомпенсатора. При возрастании шарнирного момента руля направления пружина в цилиндре будет обжиматься, сервокомпенсатор отклонится и равновесие будет достигаться при нагрузке на педалях, соответствующей новому обжатию пружины и новому шарнирному моменту сервокомпенсатора.