

Синтез_мех_систем
.pdfгде: ui - малая величина, называемая пробным шагом.
Этот метод чрезвычайно прост для программирования и требует наи-
большего объема памяти машины. Недостатком его является то, что он мо-
жет давать большие погрешности.
4.5.2 Метод интегрирования уравнений чувствительности.
Пусть, например, управляющий процесс описывается уравнениями:
dxi |
fi |
(t, x,u), xi (0) xi 0 , i 1,2...n |
(4.5.2) |
|
dt |
||||
|
|
|
Дифференцируя эти уравнения по параметрам ui, получим систему для определения функций чувствительности
dzij (t) |
n |
|
|
|
|
|
|
||
|
ik zkj |
ij ; zij (0) 0 |
(4.5.3) |
|
dt |
||||
k 1 |
|
|
где: z |
|
xi |
, |
|
fi |
, |
|
fi |
, i, j 1,2,...n |
|
ij |
u j |
ik |
xk |
ij |
u j |
|||||
|
|
|
|
|||||||
|
|
|
|
|
|
|
Используя уравнения (4.5.3) можно с высокой точностью определить ча-
|
|
|
|
|
|
|
|
( n) |
|
|
|
|
|
|
|
|
стные производные |
|
|
. Пусть, например, |
( n) |
f [x(t1 )]. Тогда |
|
||||||||||
|
|
|
|
|||||||||||||
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
u j |
|
|
|
|
|
|
|
|
|
( n) |
n |
f |
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
z |
|
(t ) |
, при этом |
находятся аналитически, а z |
|
(t |
) - из ре- |
||||||
|
|
|
|
ij |
|
ij |
||||||||||
|
u j |
|
xi |
1 |
|
|
|
xi |
|
|
1 |
|
||||
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
шения уравнения (4.5.2).
4.6 Метод случайного поиска
Опыт использования численных методов показывает, что определение градиента функции ( u ) связано со значительными трудностями. Поэтому наряду с детерминированными методами поиска на практике используют ме-
тоды случайного поиска, которые свободны от указанного недостатка, [ ]. В
методах случайного поиска направление шага, а иногда и величина, опреде-
ляются случайным образом.
Этот метод является прямым развитием известного метода проб и оши-
бок, когда решение ищется случайно, и при удаче принимается, а при неуда-
51
че отвергается с тем, чтобы немедленно снова обратиться к случайности как к источнику возможного. Такое «случайное» поведение разумно опирается на уверенность, что случайность содержит в себе все возможности, в том числе и искомое решение.
Итерационный алгоритм поиска оптимальных параметров представим в
виде: u ( n 1) u ( n ) |
u ( n 1) . |
4.7 Метод градиента для задачи с функциональным и параметрическим
управлением
Для определенности построим алгоритм градиентного спуска для ОЗУ с конкретным числом критериев в формулировке задачи прохождения фазовой
траектории через дискретную "трубку". |
|
|
|||||||||
|
|
Положим, |
что |
при |
каком–то управлении |
из |
допустимой области |
||||
|
|
(t) U 2 , a Am |
в соответствии с управлениями (3.1.2) |
из всей совокупности |
|||||||
u |
|||||||||||
безразмерных функционалов íj |
|
(t), a и íj |
|
(t), a , |
i=1, 2… …n; j=1,2…S…; |
||||||
u |
u |
||||||||||
наибольшим является функционал, соответствующий |
ой фазовой координате |
||||||||||
в сечении t=tS, т.е. |
s , или |
s . |
|
|
|||||||
52
Введем обозначение
|
' |
A s |
X s |
|
q |
A s |
a s |
||
q ts |
|
|||
|
X s |
a s |
|
|
|
' |
|||
q |
A s |
a s |
||
|
|
|||
,при
,при
q q
(4.7.1)
q q ,
и будем рассматривать функционал |
q ts |
как функционал вариационной |
|||||||||||
задачи |
в форме майера, |
[9], |
т.е. будем |
минимизировать функционал |
|||||||||
q ts , |
|
(t), a , при дифференциальных связях |
|
|
|||||||||
u |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
f (t, x (t), u (t), a ), x |
0 |
X 0 , t |
0,TA |
(4.7.2) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Согласно вариационной теории это задача на условный экстремум и ми-
нимизироваться должен равносильный исходному функционалу |
|
q |
функ- |
|||||||||||||||||||
ционал следующего вида |
|
|
|
|
|
|
|
|
|
|||||||||||||
Jq |
|
ts |
|
n |
|
i H |
t, x,u , a, dt. |
(4.7.3) |
|
|
|
|||||||||||
q |
|
xi |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Здесь |
|
|
|
|
1, |
2 ,..., |
n |
– вектор–функционал |
сопряженных |
координат, |
||||||||||||
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
H |
|
f |
|
|
|
i fi |
t, x, |
|
, a |
– функция Гамильтона. |
|
|
|
|
||||||||
|
|
|
|
u |
|
|
|
|
||||||||||||||
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Вариация функционала Jq имеет следующий вид [16]:
|
|
|
|
n |
|
|
|
ts |
ts m |
H |
|
|
ts |
r |
|
H |
|
|
|
|
|
J |
q |
|
|
|
|
i |
x |
|
|
|
a |
dt |
|
|
a dt |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
i |
|
|
|
aj |
|
j |
|
|
1 u |
|
|
|
|
|||
|
|
|
|
i 1 |
|
|
0 |
0 j 1 |
|
|
0 |
|
|
|
|
|
|||||
ts |
|
n |
|
|
H |
|
|
|
|
q |
ts |
|
|
|
|
|
|
|
(4.7.4) |
||
|
|
|
|
i |
|
|
|
xi dt |
|
x ts |
|
|
|
|
|
|
|||||
0 i 1 |
|
xi |
|
|
|
x |
|
|
|
|
|
|
|
|
|||||||
Определим сопряженные переменные из дифференциальных уравнений |
|||||||||||||||||||||
i |
|
|
|
H |
, i |
1, 2,..., n, |
|
|
|
|
|
|
|
|
|
|
(4.7.5) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
xi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
учитывая, |
что |
левый |
конец |
фазовой |
траектории фиксирован |
||||||||||||||
x 0 |
|
x0 |
и |
|
x0 |
0 , а правый свободен, т.е. x |
t |
s |
0 , будем иметь: |
||||||||||||
i |
|
i |
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
53 |
0, если i
i ts |
q |
, если i |
, |
(4.7.6) |
|
x |
|
||
|
|
|
|
Интегрируя уравнения (4.7.5) в "обратном" времени, т.е. справа на лево с начальными условиями (4.7.6) сопряженные координаты могут быть опреде-
лены.
Интегрирование в "обратном" времени осуществляется при помощи вве-
дения новой независимой переменной =ts–t. Например, для одного диффе-
ренциального уравнения |
y |
f t, y(t) , y(ts ) yk |
,t 0,ts |
будем иметь |
||||
|
|
|||||||
t |
||||||||
|
|
|
|
|
|
|||
|
y |
f , y( ) , y( 0) |
yk . |
|
|
|
||
|
|
|
|
|
||||
|
|
|
|
|
||||
Теперь вариация функционала примет следующий вид
ts r
Jq
0 1
H |
ts |
m |
H |
|
|
|
u dt |
|
a j dt |
(4.7.7) |
|||
|
|
|
||||
u |
j 1 a j |
|||||
0 |
|
|
||||
Чтобы вариация была меньше нуля, поправки u , аj выбираются из ус-
ловия
K |
H |
|
, t |
|
0, ts |
|
|
u |
|
(4.7.8) |
|||||
u |
|
|
|
|
|
||
0, |
t |
ts |
|
|
|
||
|
|
ts |
H |
|
|
||
a j K j Sign |
|
|
|
dt , |
(4.7.9) |
||
|
|
|
|
||||
|
|
0 |
|
a j |
|
||
где К , Кj – малые положительные величины.
Выражения (4.7.8, 4.7.9) являются условиями, уменьшающими значение
функционала q.
С учетом изложенного имеем следующую процедуру операций для
уменьшения функционала
Г max |
|
] |
(4.7.10) |
q [u, a, ts |
|||
q, S |
|
|
|
1. Из каких-либо соображений выбираем начальное приближение управ-
ляющих переменных из допустимой области
54
|
(0) |
{u |
(0) |
,u |
(0) |
...u |
(0) |
T |
, |
(0) |
U |
r |
|
u |
|
|
2 |
r |
} |
u |
|
||||||
(0) |
1 |
|
|
|
|
|
|
|
|||||
{a |
(0) |
, a |
(0) |
...a |
(0) |
T |
, |
m |
|
||||
a |
|
|
|
|
} |
a |
A |
|
|||||
|
|
1 |
|
2 |
|
m |
|
|
|
|
|
||
2. Интегрируем основную систему дифференциальных уравнений (4.7.2),
определяющую значение фазовых координат |
|
при начальных условиях |
|
||
x(t) |
x0 |
||||
с управляющими переменными u |
(t), a |
. |
|
|
|
(0) |
(0) |
|
|
|
|
3. Вычисляем начальное приближение значений функционалов из задан-
ной совокупности q |
[u |
, a |
, ts ], q 1, 2,...n, s 1, 2,..., |
и находим из них наи- |
|
(0) |
(0) |
|
|
больший.
4. Интегрируем сопряженную систему дифференциальных уравнений
(4.7.5, 4.7.6) в "обратном" времени при найденных значениях фазовых коор-
динат и начальном приближении управления. Находим начальное приближе-
ние сопряженных координат |
(0) |
{ |
1 , |
2 ,... |
n |
} . |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
T |
|
|
|
|
|
|
|
5. Вычисляем производные функции Н по переменным |
u при u(0) |
и инте- |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
грала |
ts |
H |
dt |
при значениях |
|
(0) |
|
(0) |
|
(0) |
|
|
(0) |
и находим поправки |
||||||||
|
|
x |
x |
, u |
u |
, a |
a |
, |
|
|
||||||||||||
0 |
a j |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u(1) , a(1)j , уменьшающие значение функционала (4.7.10) |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
u(1) |
k |
|
|
H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
u |
x( 0 ) , ( 0 ) ,u( 0 ) ,a( 0 ) |
|
|
|
|
|
|
|
|
|
|
(4.7.11) |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
a(1) |
k sign( |
ts |
H |
dt) |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
aj x( 0 ) , ( 0 ) ,u( 0 ) ,a( 0 )
6.Формируем и запоминаем первое приближение управляющих перемен-j j
ных
|
|
(0) |
(0) |
, t |
[0,ts |
] |
(1) |
u |
u |
||||
u |
|
0 |
|
,t |
ts |
(4.7.12) |
|
|
|
||||
(1) |
(0) |
(0) |
|
|
|
|
a |
|
a |
a |
|
|
|
7. Интегрируем основную систему (4.7.2) с управлением первого прибли-
жения и находим первое приближение фазовых координат.
8. Вычисляем значения функционалов и заданной совокупности и прове-
ряем выполнение условия
55
Г max |
|
|
(1) |
|
(1) ,t |
] 1 |
(4.7.13) |
q |
[u |
, a |
|||||
a, q |
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
Если условие (4.7.13) выполняется, то это будет одно из решений постав-
ленной задачи. Если нет, процедура должна быть повторена, начиная с пунк-
та 3 до нахождения решения.
Выполнение условий Г 1 решает поставленную задачу, но не наилуч-
шим образом. Для определения более эффективного управления необходимо продолжить последовательность вычислительных операций, пока последую-
щее приближение max 1 практически не будет отличаться от предыдущего,
q, s
т.е. пока не будет найдено решение минимаксной задачи.
В заключение необходимо отметить, что те особенности решения ОЗУ с параметрическим управлением, связанные с "овражной" ситуацией, рассмот-
ренные в разделе 4.4, присущи и для данного случая. Поэтому, каждая кон-
кретная задача будет требовать конкретных всесторонних исследований.
5. Приложение математических методов решения задач управ-
ления к проектированию систем
5.1 Решение задачи отделения космических аппаратов от последней
ступени ракеты-носителя
5.1.1 Основные технические требования к процессу отделения
При осуществлении операции отделения одного или нескольких КА от последней ступени ракеты-носителя (в дальнейшем просто РН), кроме требо-
ваний надежного и безотказного срабатывания всех элементов, осуществ-
ляющих разделение и отделение, должно быть обеспечено выполнение цело-
го ряда требований кинематического характера.
Отделение должно происходить безударно, т. е. любые соприкосновения конструкции КА и РН после срабатывания системы отделения недопустимы.
Приращение угловой скорости КА за счет срабатывания системы отделения должно быть минимальным. Это требование обычно задается в виде нера-
56

венств ограничивающих величину приращения угловой скорости в проекци-
ях на связанные с КА оси координат. Кроме того, относительные скорости расхождения после срабатывания системы отделения должны исключать возможность столкновения КА между собой и с РН при орбитальном полете.
Могут также предъявляться требования по обеспечению заданного расстоя-
ния между КА и РН через определенный промежуток времени после отделе-
ния, или требование по увеличению расстояния между КА на каждом витке траектории на заранее заданную величину.
Эти требования обычно задаются конкретно для каждого класса КА в за-
висимости от их назначения и особенности работы на орбите.
5.1.2 Математическое описание процесса отделения и последующего дви-
жения
В начале рассмотрим движение КА и РН на «ближнем» участке расхож-
дения, т. е. на участке непосредственно срабатывания энергетических средств, осуществляющих отделение. На практике, в большинстве случаев, в
качестве таких средств используются пружинные толкатели. Их корпуса же-
стко закреплены на переходном отсеке (ПхО) РН так, что продольная ось корпусов совпадает с направлением отделения КА.
Количество толкателей выбирается на стадии формирования структурной схемы системы отделения. Из условий рациональности компоновки и сим-
метрии отделения их может быть 3, 4 или 6 штук. Поскольку относительное расстояние между КА и РН при срабатывании толкателей мало, будем счи-
тать, что движение РН и КА происходит только под действием усилий толка-
телей в инерциальной системе координат, которая вместе с ц.м. системы КА
+ РН движется с орбитальной скоростью. Иными словами, кривизной поля тяготения пренебрегаем. КА и РН считаем абсолютно твердыми телами по-
стоянного состава.
Будем считать, что усилие пружинного толкателя является линейной функцией перемещения его штока, т. е. F ( ) Fo c  ; где Fo – начальное
; где Fo – начальное
57

усилие, с – жесткость пружины толкателя, – перемещение пружины толка-
теля. Диаграмма усилия толкателя представлена на рисунке 5.1.
F
Fo
Fk
h
Рисунок 5.1 – Диаграмма усилия толкателя Здесь Fk – конечное усилие толкателя, h – полный ход штока.
Fо – начальное усилие толкателя.
Перемещение штока толкателя по времени и направление действия силы в пространстве будут определяться кинематическими параметрами относи-
тельного движения КА и РН.
Расчетная схема процесса отделения на участке работы толкателей приве-
дена на рисунке 5.2. Здесь изображен случай отделения одного КА от РН под действием одного толкателя (случай отделения нескольких КА принципи-
альных изменений не вносит).
58
zи
ц.м. ОИ
xи |
|
|
|
|
|
|
|
|
|
|
|
|
rA |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||
|
|
F А |
yи |
|
zКА |
|||||
|
|
|
|
|
|
|
|
|
|
|
zo |
R |
И |
ao |
|
|
|
|
|||
|
И |
|
|
|
|
|||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aПo |
|
|
|
|
|
|
yo |
|
F |
||||||
|
|
|
|
|
||||||
|
|
|
rП |
|||||||
|
|
|
|
|
|
ц.м. |
||||
|
|
RКА |
|
|
||||||
|
|
|
|
|
|
|
|
ОКА |
||
|
|
|
|
xКА |
|
|
|
|
|
|
|
|
xo |
|
|
|
|
yКА |
|||
|
|
|
|
|
|
|
||||
Рисунок 5.2 – Расчетная схема процесса отделения на участке работы тол-
кателей
На рисунке показаны: xoyozo – инерциальная система координат, xиyиzи, xКАyКАzКА – связанные системы координат, начало которых совпадает с ц. м.
КА и РН соответственно, - единичный вектор нормали плоскости П в с. к.
xКАyКАzКА (плоскость стыковочного шпангоута КА); rП - радиус-вектор неко-
торой точки, принадлежащей плоскости П; aИ0 - единичный направляющий вектор прямой в xиyиzи совпадающей с продольной осью толкателя; rA - ради-
ус-вектор точки А, совпадающей в начальный момент с концом штока толка-
теля.
59

Уравнение прямой в xиyиzи, совпадающей с продольной осью толкателя
имеет следующий вид: |
|
|
o |
, где – параметр. Уравнение этой пря- |
|||||
r |
r |
a |
И |
||||||
|
|
|
|
|
|
A |
|
|
|
мой в инерциальной с. к. xoyozo: |
|
|
|
||||||
|
|
|
о t |
|
|
(5.1.1) |
|
||
R |
A r |
A a |
R |
И |
|
||||
|
И A |
И |
И |
|
|
|
|
|
|
где: AИ – матрица перехода от xиyиzи к xoyozo.
Аналогично можно записать уравнение плоскости П в c. к. xКАyКАzКА и xoyozo, используя матрицу перехода от с. к. КА к с. к. инерциальной:
o |
|
|
|
|
|
в xКАyКАzКА, |
|
|
|
|
a |
П |
(r r ) 0 |
|
|
|
|||||
|
|
|
П |
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
0 в x y z |
|
|
|
|
a o |
(R |
R |
КА |
A r ) |
. |
(5.1.2) |
|||
|
КА |
П |
|
|
КА П |
o o o |
|
|
||
Система уравнений (5.1.1), (5.1.2) определяет в любой момент времени
точку пересечения прямой и плоскости и значение параметра |
|
, величина ко- |
|||||||||||||||||||||||
торого |
равна |
расстоянию |
|
от |
|
т. |
|
A |
вдоль |
|
прямой |
до |
|||||||||||||
плоскости П, т. е. перемещению штока толкателя, |
(t)= |
(t). |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Подставив R из (5.1.1) в (5.1.2) получим выражение для . |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
A a o |
( A r A a |
о |
|
R |
И |
R |
КА |
A r ) 0, |
|
|
|
|
|
|
|
|
|
|
|||||||
КА П |
И |
A |
И |
И |
|
|
|
КА |
|
П |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
A a o |
A r A a o |
A a |
о |
|
A a o R |
И |
A a o |
R |
КА |
A a o |
A r 0, |
|
|
||||||||||||
КА П |
И |
A |
КА П |
И |
И |
|
КА |
П |
|
КА |
П |
|
КА П |
КА |
|
П |
|
|
|
||||||
|
|
o |
|
|
|
o |
|
о |
|
|
|
o |
|
|
|
|
o |
|
|
o |
|
|
|
(5.1.3) |
|
|
AКА aП AИ rA |
AКА aП AИ aИ |
|
AКА aП RИ |
AКА aП RКА |
AКА aП |
AКА rП |
|
|||||||||||||||||
|
|
. |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
a o A a о |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
КА |
П |
И |
И |
|
|
|
|
|
|
|
|
|
|
|
|
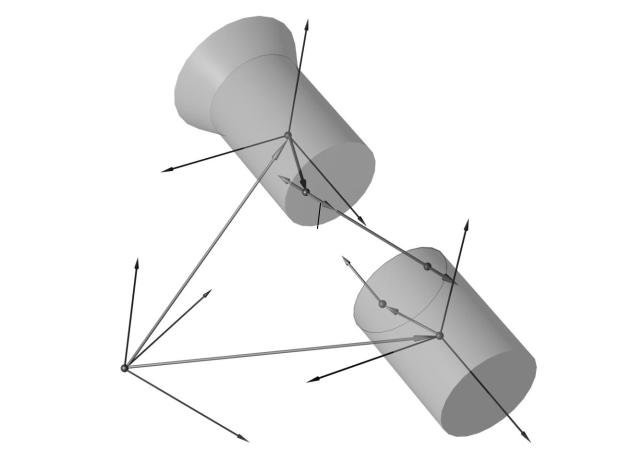
Схема работы толкателя приведена на рисунке 5.3.
60