

1.3. Движения в станках. Основные понятия о кинематике станков
Для осуществления процесса резания каждый станок имеет ряд рабочих органов, которым сообщаются движения, определяемые назначением станка и характером выполняемых на нем работ.
Движения на станках делятся на две категории:
1) основные (движения формообразования), к которым относятся главное движение, движение подачи и в некоторых группах станков также движение деления, движение огибания;
2) вспомогательные движения не связанные с процессом резания (закрепление заготовки, закрепление инструмента, установка частоты оборотов и величины подач и т.д.).
Для анализа движения рабочих органов станков на практике
используют упрощенные, условные схемы механизмов, дающие наглядное представление о кинематике станков. Такие схемы называются кинематическими, а для их вычерчивания применяются условные обозначения, представленные в работе [2].
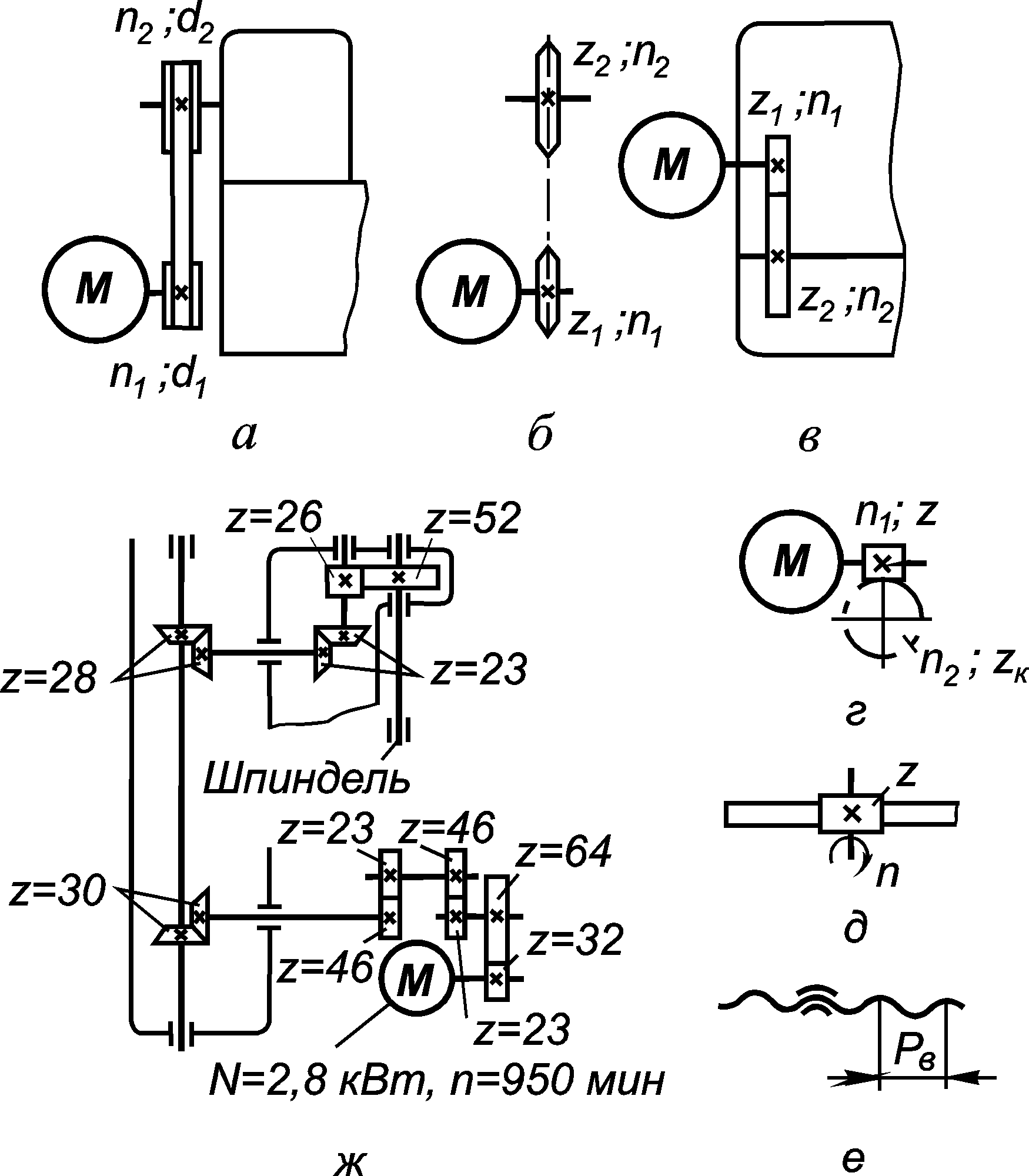
Кинематическая схема станка состоит из отдельных кинематических цепей. Под кинематической цепью станка понимают совокупность ряда передач: ременных (рис. 2, а), цепных (рис. 2, б), зубчатых (рис. 2, в), червячных (рис. 2, г), реечных (рис. 2, д), винтовых (рис. 2, е) и др., обеспечивающих передачу движения от начального звена к конечному, например, от электродвигателя главного движения к шпинделю.
Рис.
2. Передачи
в станках
Отношение
частоты вращения (угловой скорости)
![]() ведомо-
ведомо-
го
вала к частоте вращения
![]() ведущего вала называют передаточным
отношением:
ведущего вала называют передаточным
отношением:
![]()
Ременная передача. Передаточное отношение без учета скольжения ремня (см. рис. 2, а)
![]() откуда
откуда
![]() ,
,
где
![]() и
и![]() - диаметры соответственно ведущего и
ведомого шкивов.
- диаметры соответственно ведущего и
ведомого шкивов.
Цепная передача. Передаточное отношение (см. рис. 2, б)
![]() откуда
откуда
![]() ,
,
где
![]() и
и![]() - числа зубьев соответственно ведущей
и ведомой звездочек.
- числа зубьев соответственно ведущей
и ведомой звездочек.
Зубчатая передача (см. рис. 2, в), осуществляемая цилиндрическими или коническими зубчатыми колесами. Передаточное отношение
![]() откуда
откуда
![]() ,
,
где
![]() и
и![]() - числа зубьев соответственно ведущего
и ведомого зубчатых колес.
- числа зубьев соответственно ведущего
и ведомого зубчатых колес.
Червячная передача. Передаточное отношение (см. рис. 2, г)
![]() откуда
откуда
![]() ,
,
где
![]() - число заходов червяка;
- число заходов червяка;![]() - число зубьев червячного колеса.
- число зубьев червячного колеса.
Реечная передача. Длина прямолинейного перемещения рейки за один оборот реечного зубчатого колеса (см. рис. 2, д)
![]() ,
,
где
![]() - шаг зуба рейки, мм;
- шаг зуба рейки, мм;![]() - число зубьев реечного зубчатого колеса;
- число зубьев реечного зубчатого колеса;![]() - модуль зубьев реечного зубчатого
колеса, мм.
- модуль зубьев реечного зубчатого
колеса, мм.
Винт и гайка. Перемещение гайки за один оборот винта (см. рис. 2, е)
![]() ,
,
где
![]() - число заходов винта;
- число заходов винта;![]() - шаг винта, мм.
- шаг винта, мм.
Для определения общего передаточного отношения кинематической цепи (рис. 2, ж) необходимо перемножить между собой передаточные отношения отдельных передач, входящих в кинематическую цепь:
![]() .
.
Тогда
![]() мин-1.
мин-1.
![]()
2. Приводы станков
Привод станка – это совокупность устройств, передающих движение от источника движения к рабочим органам станка (рис. 3).
![]()
Рис. 3. Устройства привода станка
Источником движения в станках является электродвигатель, который устанавливается либо на станке (наиболее часто), либо вблизи станка.
Устройство
для регулирования скорости предназначено
для изменения скорости рабочего
органа станка от
![]() до
до![]() .
Отношение
.
Отношение![]() - называется диапазоном регулирования
частот станка, который изменяется, как
правило, в пределах от 1 до 200.
- называется диапазоном регулирования
частот станка, который изменяется, как
правило, в пределах от 1 до 200.
Изменение скорости рабочего органа может производиться ступенчато, либо бесступенчато.